彈性飛機的混合H2/H∞最優PID控制器參數優化
2011-06-05 10:19:54李愛軍劉世民
振動與沖擊 2011年10期
章 萌 , 李愛軍 , 劉世民
(1.魯東大學 電子與電氣工程學院,煙臺 264025;2.西北工業大學 自動化學院,西安710072;3.中航工業第一飛機設計研究院第6研究所,西安 710089)
現代大型飛機具有輕結構質量、薄升力面、細長機身和低動壓載荷系數等的特點,這使得飛機的結構柔性增加,結構彈性形變增大,因此,需要考慮結構彈性形變的影響,這種考慮了結構彈性形變的飛機稱為彈性飛機。由于彈性飛機的彈性運動與剛性運動之間會出現較強的耦合,傳統的針對剛性和彈性模態分別設計控制器的方法變得不再適用[1]。另外彈性飛機在建模時在剛性模態的基礎上引入了大量的彈性自由度來表示彈性模態,剛性模態和彈性模態的耦合與疊加使得彈性飛機模型往往具有很高的階次。如果直接基于其全階模型進行控制器設計往往會帶來復雜的設計過程和大量的運算工作,得到的控制器階次往往也很高,不利于工程的實現。因此,基于彈性飛機的降價模型進行控制器設計是一種較好的選擇,但由于降階模型與全階模型之間必然存在著降階誤差(非參數不確定性或高頻未建模動態),這又需要設計魯棒控制器來鎮定模型降階帶來的非參數不確定性。
對于彈性飛機魯棒控制器的設計,文獻[2-4]和文獻[5]分別使用H∞混合靈敏度控制方法和QFT方法基于降階模型設計了魯棒控制器。這些魯棒控制器雖然具有一定的魯棒性,但也存在著控制器階次較高、增益較大等缺點,這些缺點顯然不利于控制器的工程實現。因此,在彈性飛機的魯棒控制器設計中迫切需要一種既能保證魯棒性又能降低控制器階次和增益的方法。
文獻[6-7]提出的混合H2/H∞最優PID控制器設計方法是一種魯棒優化設計方法,該方法結合了魯棒控制、PID控制和智能優化算法的各自優點,把系統H2/H∞范數作為優化設計指標,使用遺傳算法(GA)作為優化工具來進行PID控制器參數優化,從而獲得魯棒性較強且控制器階次較低的魯棒最優PID控制器。文獻[8]研究了F18/HARV飛機的混合 H2/H∞最優PID控制器的參數優化,得到的控制器階次較低且具有較強的魯棒性能,表明了該優化設計方法設計的控制器既有較強的魯棒性又有控制器結構簡單、階次和增益較低等優點,因此,完全可以把該優化設計方法用于彈性飛機中,但目前對于該問題的研究成果還沒有。
差分進化算法(DE Algorithm)是由Storn R和Price K提出的一種群智能優化算法[9]。該算法實際上是一種實數編碼且基于貪婪保優策略的遺傳算法,具有算法原理簡單、易于實現、優化性能強等優點,已經在優化領域得到了廣泛應用。因此,完全可以代替遺傳算法用于混合H2/H∞最優PID控制器的參數優化中。
為此,本文研究了彈性飛機的混合H2/H∞最優PID控制器的參數優化。首先,基于平衡截斷法得到了某彈性飛機的降階模型,并根據降階模型與全階模型的降階誤差選取了合適的魯棒加權函數。之后,給出了一種計算閉環系統誤差H2范數的簡化計算方法,從而可以計算H2/H∞優化設計指標。最后,使用DE算法對混合H2/H∞最優PID控制器參數進行參數優化。
1 混合H2/H∞PID控制器優化設計的基本原理
1.1 優化設計指標
考慮如圖1所示的魯棒PID控制系統,PID控制器的形式為:


圖1 魯棒PID控制系統Fig.1 Robust PID control system
被控對象P(s)中含有乘性不確定性攝動ΔP(s),其中:ΔP(s)假定為穩定的但具體形式并不確定的一個不確定性集,通過一個已知穩定的加權函數WT(s)來限定其攝動范圍,即滿足:或者(ΔP(jω))<(WT(jω))。
假定ΔP(s)=0,則系統的靈敏度函數S和補靈敏度函數T可分別定義為:
靈敏度函數S(s)是誤差E(s)與參考輸入R(s)之間的傳遞函數,是決定系統跟蹤誤差大小的最重要指標。S(s)的奇異值越小,則系統的跟蹤誤差越小,系統的跟蹤性能越好。同時,S(s)也是干擾D(s)與輸出Y(s)之間的閉環傳遞函數,S(s)的奇異值越小,系統對干擾的抑制能力就越強。因此,可以用作為閉環系統對干擾抑制能力和跟蹤能力的度量。在此引入靈敏度函數加權函數Ws(s),使其滿足:

補靈敏度函數T(s)是系統參考輸入R(s)與輸出Y(s)之間的閉環傳遞函數矩陣,它是決定系統魯棒穩定性的重要指標,在系統存在不確定性時,有較大的加權會迫使系統的輸出信號穩定。T(s)的奇異值越小,標志著系統因模型不確定性產生的復合干擾對系統的影響越小,因此是對乘性攝動(1+ΔP(s))魯棒性的一種測度。在此,引入補靈敏度函數加權函數WT(s),使其滿足:

為了使系統同時獲得良好的干擾抑制能力、跟蹤能力和魯棒穩定性,希望控制系統的靈敏度函數S(s)和補靈敏度函數T(s)的奇異值能夠同時達到最小,但由式(2)可知S(s)+T(s)=1,二者同時最小是相互矛盾的。這就需要對靈敏度函數S(s)和補靈敏度函數T(s)在特定頻段內進行折衷處理,使得在低頻段內系統的靈敏度函數的奇異值較小,在高頻段內系統的補靈敏度函數的奇異值較小。引入加權函數WS(s)和WT(s)后,使它們分別在低頻段和高頻段上具有較大的值,則可以引出如下兩個H∞優化設計指標:
①魯棒穩定性指標:

②干擾抑制指標:

對二者進行折衷處理得到總的H∞優化指標為:

為最小化閉環系統的跟蹤誤差,引入閉環系統跟蹤誤差E(s)的H2范數指標:

混合H2/H∞最優PID控制器優化設計的最終優化指標J為:

由上可得混合H2/H∞最優PID控制器優化設計的要求是:優化設計一個PID控制器,在保證名義閉環系統(ΔP(s)=0,D(s)=0)穩定的情況下,使得式(9)所示的系統H2/H∞范數優化指標最小。
1.2 閉環系統誤差E(s)的H2范數的計算方法
對于閉環系統誤差E(s)的H2范數的計算方法,文獻[10]給出了一個初步的結果,但計算過程較為繁瑣復雜,下面給出一個簡化的計算方法。
閉環系統的跟蹤誤差E(s)為:

其中:R(s)為單位階躍信號。
根據Parseval定理有:

其中:A(s),B(s)是Hurwitz多項式。
上述優化問題可以借助于留數定理來解決。
假定:

根據式(12)可以把式(11)表示為:
則有[10]:

其中:Pn-1是下面求解 Pi(i=0,1,…,n -1)的 n 個方程得到的結果:
同時令:

且 P=[p0,p1,…,pn-1]T。
則式(15)可以寫為矩陣方程

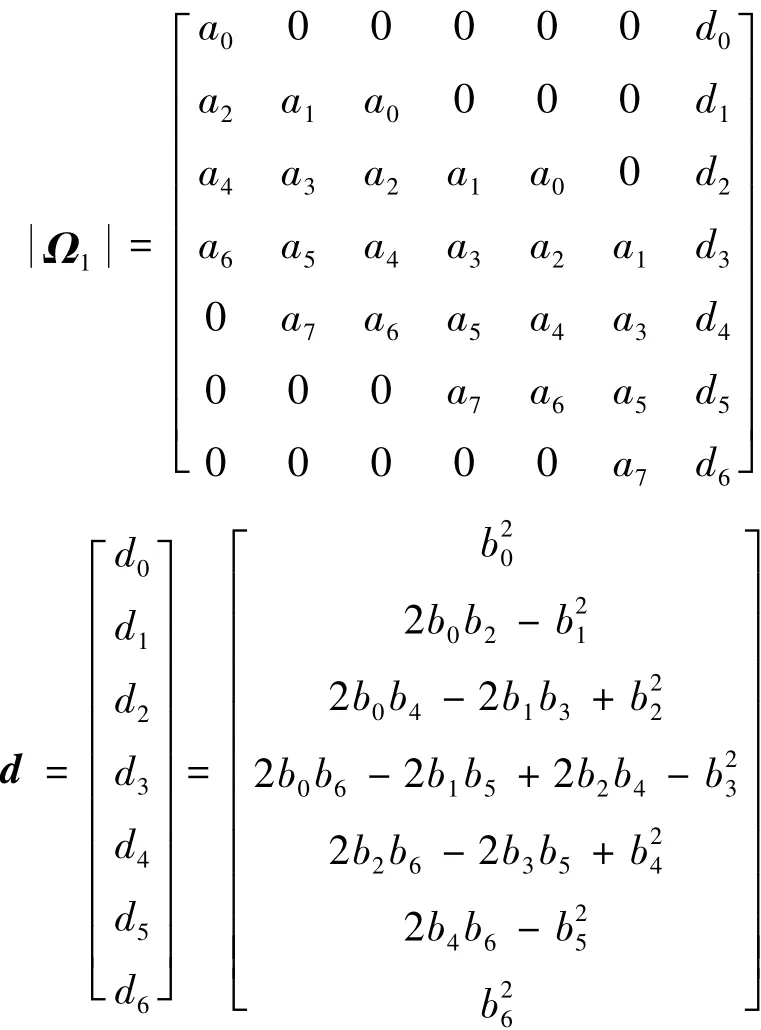
其中Ω為矩陣:

為了求解式(18)中的pn-1,使用Cramer法則有:

其中:

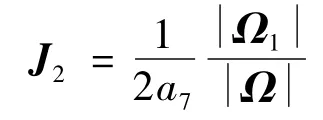
綜上所述,由式(14)、式(17)和式(20)可得:

2 彈性飛機混合H2/H∞最優PID控制器參數優化
以某彈性飛機縱向運動作為例,其基準飛行狀態為高度H=1500 m,馬赫數M=0.6,在此狀態下進行線性化處理并考慮前4階彈性形變模態,得到該彈性飛機的全階狀態方程為:

其中:狀態 x=[V,α,θ,q,ηi,i]T,ηi,i分別表示廣義彈性形變及其形變速度量,i=1,2,3,4分別代表第1~4個彈性模態,其阻尼比都為ξ=0.02,自然頻率分別為:ω =5.88,10.8,11,0,13.3 rad/s;V 為飛機前向速度,α是迎角,θ是俯仰角,q是俯仰角速度,輸入u=δe是升降舵偏轉角,輸出y是駕駛艙處的法向過載n。由此可看出,該彈性飛機全階模型各包含了4個剛性模態量和彈性模態量,由于每個彈性模態量又包含了彈性形變量和形變速度量,因此,該彈性飛機全階模型的階次為12階。
2.1 模型降階與加權函數的選取
該彈性飛機模型的Hankel奇異值如圖2所示,可以看出,后6階的 Hankel奇異值相對于前6階的 Hankel奇異值都很小,即有:,應該可以完全截斷而不會對模型的精確度產生較大影響。因此,截斷后6個狀態量,則降階模型的階次為6。
使用平衡截斷算法[11,12]進行模型降階,得到6階降階模型Gr(s)。圖3為全階模型和降階模型的頻域響應,從圖中可以看出,中低頻段降階模型與全階模型逼近效果較好,高頻段存在一定的截斷誤差。在設計混合H2/H∞最優PID控制器時,就可以把模型降階誤差作為被控對象存在的非參數乘性不確定性(高頻未建模動態)來處理。在選取補靈敏度加權函數WT(s)時應使其覆蓋Δm(s)所包括的乘性不確定區域。在此,選定補靈敏度加權函數為WT,則乘性不確定性Δ(s)和補靈m
敏度加權函數WT(s)的頻率響應曲線如圖4所示。此外,選取靈敏度加權函數為:

圖2 彈性飛機全階模型的Hankel奇異值Fig.2 Flexible aircraft full order model Hankel singular values

圖3 全階模型與降階模型的頻率響應Fig.3 Full order model and reduced order model frequency responses

圖4 乘性不確定性和補靈敏度加權函數的頻率響應Fig.4 Multiplicative uncertainty and complementary sensitivity function frequency responses
2.2 閉環系統誤差E(s)的H2范數的計算
對如圖1所示的魯棒PID控制系統,閉環系統誤差的傳遞函數為:

根據式(16)、式(19)、式(21)可得:

則由式(22)可得閉環系統誤差E(s)的H2范數的計算公式為:
2.3 基于DE算法的最優PID控制器參數優化
把式(9)所示的優化指標作為優化設計中的目標函數,使用DE算法優化混合H2/H∞最優PID控制器的參數。首先對待優化參數kp、ki和kd進行編碼,個體編碼結構為:x=[kp,ki,kd],則形成了一個 3 維的搜索空間。隨機初始化m=30個個體形成一群初始隨機解,其中第 i個個體為 xi=(xi1,xi2,xi3),i=1,2,…,m。xi的搜索范圍為 xi∈[0,20]。
按照差分進化算法的要求,由式(24)對個體進行差分變異操作得到變異個體vi。

其中:F為縮放因子,選取為F=0.5。
然后對個體xi和變異個體vi進行交叉操作得到試驗個體ui,其第j個染色體可表示為:

其中:rand(0,1)為[0,1]之間的均勻隨機數;jrand為[1,3]之間的生成的隨機整數;CR為交叉概率因子,選取為 CR=0.3。
最后,進行選擇操作,得到如式(26)所示的下一代個體 xi'。

其中:f(·)為適應度函數,即為如式(9)所示的優化指標。
經過50次迭代后,得到的混合H2/H∞最優PID控制器參數為:

3 魯棒穩定性驗證與仿真分析
3.1 魯棒穩定性驗證
基于降階模型設計了混合H2/H∞最優PID控制器,但要使用該控制器控制彈性飛機全階模型,設計的控制器是否具有較強的魯棒性來鎮定模型降階產生的非參數乘性不確定性從而保證整個系統的魯棒穩定性是首先需要驗證的。
對于非參數乘性不確定性Δm(s),有G(s)=[I+Δm(s)]Gr(s),根據小增益定理,如果則系統具有魯棒穩定性。
圖5 給出了 σ[Δm(jω)]和 σ[T-1(jω)]頻率響應魯棒穩定性驗證曲線,可以看出,在全頻段內都滿足小增益定理,設計的控制器能夠保證系統的魯棒穩定性。
3.2 仿真分析與比較
為體現出優化設計的混合H2/H∞最優PID控制器的優越性,現將其與H∞混合靈敏度控制器的控制效果和魯棒性能做比較。在進行H∞混合靈敏度控制器的設計時,所選的加權函數與混合H2/H∞最優PID控制器設計中選取的加權函數完全一致,設計得到的H∞混合靈敏度控制器為:

分別使用混合H2/H∞最優PID控制器和H∞混合靈敏度控制器控制彈性飛機的全階模型,其狀態方程如式(23)所示,輸入信號為單位階躍信號,輸出量為過載和彈性模態的形變量和形變速度量,因為在模型降階時截斷了后3個彈性模態,因此,我們重點關注后3個彈性模態的響應情況。過載和后3個彈性模態的時域響應如圖6、圖7所示。
由以上仿真圖可看出,在標稱狀態時,兩種控制器的控制效果較相近,H∞混合靈敏度控制器作用下的過載響應無穩態誤差和超調量,混合 H2/H∞最優 PID控制器作用下的過載響應無穩態誤差,超調量為2.5%,調節時間都為3.5 s。但設計的混合 H2/H∞最優PID控制器的階次和增益遠小于H∞混合靈敏度控制器。
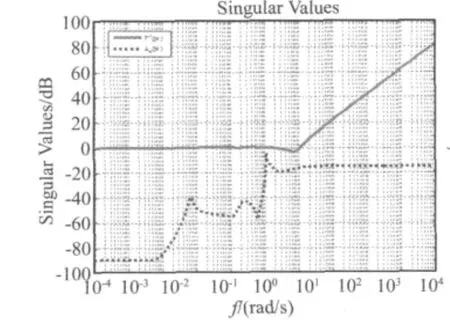
圖5 魯棒穩定性驗證曲線Fig.5 Robust stability validation curve
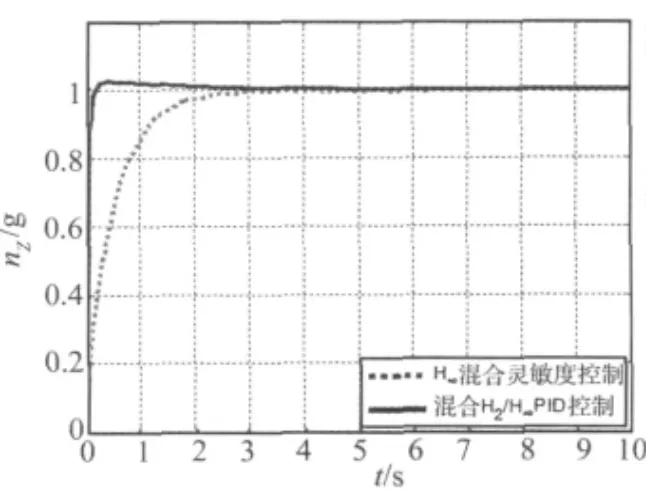
圖6 過載響應曲線Fig.6 Overload response curve

圖7 彈性模態的響應曲線Fig.7 Elastic modal response curve


當彈性飛機全階模型的狀態矩陣和控制矩陣A,B存在-20%攝動時,即被控系統同時存在著參數不確定性和非參數不確定性時,彈性飛機的過載和后3個彈性模態的時域響應如圖8、圖9所示。
由以上仿真圖可看出,此時H∞混合靈敏度控制器不能對彈性飛機進行較好地控制,特別是過載和第2個彈性模態的響應呈現出明顯的振蕩發散的趨勢,表明該控制器僅能鎮定非參數不確定性這一種不確定性。而混合H2/H∞最優PID控制器卻能取得較好的控制效果,過載響應無穩態誤差,超調量為2.5%,調節時間約為3.8 s。同時,各個彈性模態都能夠得到較好地抑制,快速地衰減到零。此時的響應與標稱時的響應十分接近,這表明該控制器能夠同時鎮定參數和非參數兩種不確定性,具有更強的魯棒性。
通過以上分析比較可知,經過參數優化后得到的混合H2/H∞最優PID控制器與傳統的H∞混合靈敏度控制器相比,具有控制器階次低、增益低、魯棒性強等優點。
4 結論
本文研究了彈性飛機混合H2/H∞最優PID控制器的參數優化問題。通過使用差分進化算法極小化H2/H∞優化指標優化了混合H2/H∞最優PID控制器的參數,使得控制器具有較強的魯棒性和較低的增益。仿真結果表明,優化設計的混合H2/H∞最優PID控制器可以同時鎮定參數和非參數兩種不確定性,具有更強的魯棒性。表明該參數優化方法是彈性飛機混合H2/H∞最優PID控制器參數優化中一種有效、實用的方法。
[1]Schmidt D K,Raney D L.Modeling and simulation of flexible flight vehicles [J].Journal of Guidance,Control and Dynamics,2001,24(3):225 -235.
[2]Li X H,Ramesh K A.Application of reduced-order-models to robust control of the dynamics of a flexible aircraft[R].AIAA-2003-5504,2003.
[3]劉世民.彈性飛機模型降階與控制律設計[D].西安:西北工業大學,2010.
[4]劉 寶.彈性飛機的建模與控制研究[D].西安:西北工業大學,2008.
[5]李愛軍,章衛國,劉世民,等.基于降階模型的彈性飛行器QFT控制設計與仿真[C]//中國航空學會.第三屆中國導航、制導與控制學術會議論文集.北京:航空工業出版社,2009.396-400.
[6]Chen B S,Cheng Y M.A genetic approach to mixed H2/H∞optimal PID controller[J].IEEE Control System Magazine,1995,15(5):51 -60.
[7]Renato A K,Joost P R.Design of optimal disturbance rejection PID controllers using genetic algorithm [J].IEEE Trans on Evolutionary Computation,2001,5(1):78 -82.
[8]Ho S J,Ho S Y,Hung M H,et al.Designing structurespecified mixed optimal H2/H∞controllers using an intelligent genetic algorithm IGA [J].IEEE Trans on Control Systems Technology,2005,13(6):1119 -1124.
[9]Storn R,PriceK.Differential evolution:A simple and efficient heuristic for global optimization over continuous spaces[J].Journal of Global Optimization,1997,11(4):341-359.
[10]Jury E,Dewey A.A general formulation of the total square integrals forcontinuoussystem [J]. IEEE Transon Automatic Control,1965,10(1):119 -120.
[11]Moore B C.Principal component analysis in linear system:controllability,observability and model reduction[J].IEEE Trans on Automatic Control,1981,26(1):17 -31.
[12]Laub A J,Heath M T,Paige C C,et al.Computation of balancing transformations and other applications of simultaneous diagonalization algorithms[J].IEEE Trans on Automatic Control,1987,32(2):115 -122.
[13]胡 峰,吳 波,胡友民,等.利用粒子群優化算法實現阻尼比和頻率的精確識別[J].振動與沖擊,2009,28:(7):8-11.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
環球時報(2022-05-30)2022-05-30 15:16:57
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
