基于有無位置傳感器的無刷直流電機雙模控制器設計
2011-06-02 09:54:22陳鐵錚顏鋼鋒
電機與控制應用 2011年2期
陳鐵錚, 顏鋼鋒
(浙江大學電氣工程學院,浙江杭州 310027)
0 引言
無刷直流電機(Brushless DC Motor,BLDCM)具有結構簡單、調速性能好、工作效率高、運行噪聲低等優點,已經廣泛應用于自動化伺服、家用電器、電動車輛驅動、工業過程控制、醫療器械等國民經濟的多個領域。傳統的永磁BLDCM采用內置式位置傳感器,獲取位置信號電路結構簡單、精度較高。但在實際應用中,由于種種原因,內置式位置傳感器往往使用1~2年就會發生損壞,在某些惡劣工作環境(如高溫潮濕環境)中持續工作壽命還會明顯縮短。如果位置傳感器在電機運行時突然損壞(如電動汽車正常運行時電機位置傳感器突然損壞),就很容易引發嚴重的安全事故,而且即使電機安全停轉,在不便維修的情況下也會給用戶帶來較大困擾。采用有無位置傳感器雙模式控制方法時,控制器在此情況下會自動平滑轉換到無位置傳感器控制模式,控制電機繼續保持正常運行,極大地增強了控制器的安全性與可靠性,在電動車輛運行安全保障方面具有重大意義,而且用戶可以在空閑狀態下自行選擇維修時間,使用更加方便。控制器在無位置傳感器控制模式下,采用反電勢法獲取轉子位置信號。當電機靜止或低速運行時,由于反電勢為零或者很小,無法準確對應轉子位置狀態,利用定子鐵心線圈電感的磁飽和效應,對定子繞組施加不同方向的短時脈沖電壓,并采用最大概率法可以獲得此狀態下轉子的位置信息。
1 轉子位置信號獲取技術
轉子位置信號的獲取包括有位置傳感器和無位置傳感器兩種途徑。
1.1 有位置傳感器轉子位置信號獲取
位置傳感器是BLDCM的關鍵部件,它將轉子位置信息轉換成電信號,用于控制逆變器功率開關的準確切換,從而使定子各相繞組按一定順序導通,實現換相。霍爾傳感器由于其具有價格低廉、性能可靠、安裝簡易等優點,成為較普遍使用的一種位置傳感器。霍爾位置傳感器信號檢測電路框圖如圖1所示。
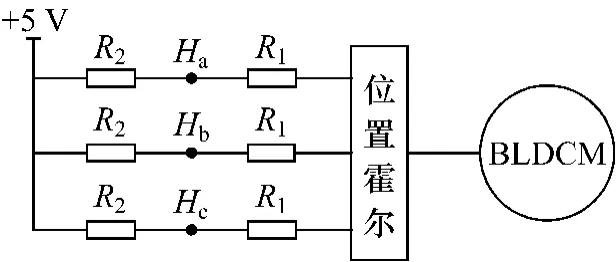
圖1 霍爾位置傳感器信號檢測電路框圖
由于霍爾傳感器為開路輸出,為了獲得正確的信號,需要將經過限流電阻R1后的信號用電阻R2上拉到霍爾傳感器的供電電壓+5 V上去。圖1中的Ha、Hb、Hc分別表示經過處理后得到的最終位置信號,這三路信號可直接送入控制芯片。
1.2 無位置傳感器轉子位置信號獲取
現有的無傳感器轉子位置檢測技術包括續流二極管法、狀態觀測器法、電感法、磁鏈估計法,以及最近幾年比較熱門的人工智能法等,本文將討論反電勢法。
反電勢法的原理如下:電機由靜止狀態起動后,轉子磁鋼所產生的磁通就會切割定子繞組進而產生反電動勢E。反電動勢E的大小正比于電機的轉速及其氣隙中的磁感應強度B。當轉子磁鋼的極性改變時,反電動勢波形的正負方向也隨之改變。因此,只要檢測出反電動勢波形的過零點,就可以確定轉子的準確位置,并以此來控制BLDCM。
本文所討論的電機采用三相橋式星型連接方式,其反電動勢波形檢測電路如圖2所示。
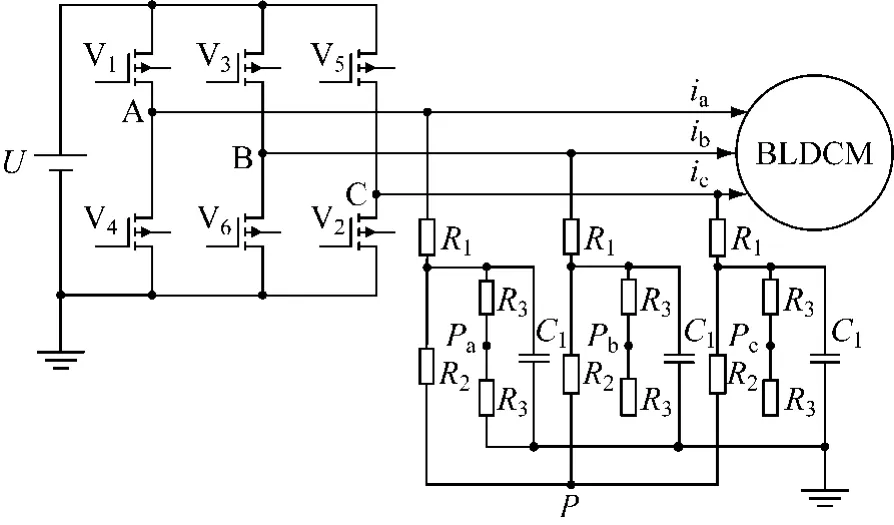
圖2 反電動勢波形檢測電路框圖
對于三相繞組為星型連接的BLDCM而言,其三相繞組電壓平衡方程為
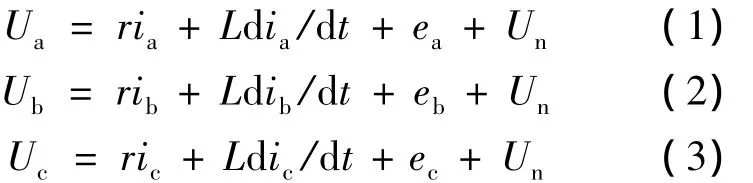
式中:Ua、Ub、Uc——三相繞組端點對地電壓;
r——各相繞組電阻;
ia、ib、ic——流經各相繞組的電流;
L——各相繞組電感;
ea、eb、ec——各相繞組產生的反電動勢;
Un——電機三相繞組中心點對地電壓。
在電機控制采用兩兩導通方式時,始終有一相是不通電的。現假設B相不通電,即ib=0,由于ia+ib+ic=0,可知此時ia=-ic。在未導通的B相繞組中的反電動勢波形過零點附近仍有ia=-ic,將式(1)與式(3)相加,可得此時中性點電壓:

由式(2)和式(4)得:

同理:

在采用兩兩導通方式時,一個周期中每相繞組導通120°電角度,每隔60°電角度換相一次。如圖2所示,將檢測到的反電動勢波形信號Pa、Pb、Pc分別與參考中性點電壓P進行比較,可以獲得反電動勢波形過零點信號,將該信號延時30°電角度后就可以得到間接的電機轉子位置信號,也就是電機的換相點信號。
反電勢法的主要缺點在于,當電機處于靜止和低速運行時,無法得到正確的反電動勢信號,因此反電勢法存在起動困難的問題。本文利用定子鐵心線圈電感大小受電機磁路飽和影響的原理,在電機靜止和低速運行時,對定子繞組施加不同方向的短時脈沖電壓矢量,同時檢測不同電壓矢量下直流母線處的峰值電流響應,利用最大概率法來確定轉子當前位置。
在圖1所示的框圖中,根據MOS管不同的開關組合,構成6種不同的短時脈沖電壓矢量U1(1,0,0)、U2(1,1,0)、U3(0,1,0)、U4(0,1,1)、U5(0,0,1)、U6(1,0,1),這 6 個矢量剛好將轉子所處的360°區間等分成6份。轉子靜止和低速狀態位置判定原理圖如圖3所示。
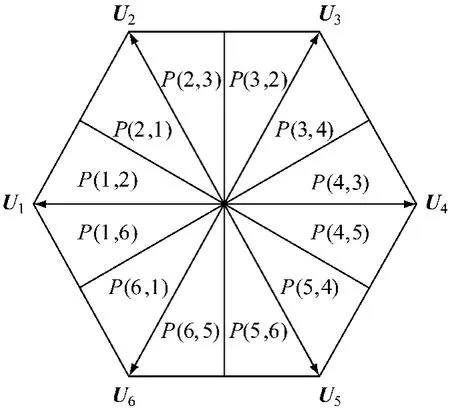
圖3 轉子靜止和低速狀態位置判定原理圖
圖3 中 P(x,y)(x=1,2,3,4,5,6;y=1,2,3,4,5,6;x≠y)為脈沖電壓矢量 Ux的左右30°區域。
當進行靜止和低速運行狀態轉子位置檢測時,為了盡可能減小施加的脈沖電壓矢量對電機定子和轉子間氣隙磁場的影響,脈沖電壓的施加順序應盡量相距最大間隔,在這里將按照U1、U4、U6、U3、U5、U2的順序依次施加到三相繞組上。在每個脈沖電壓矢量作用某一固定時間T后,對母線電流進行采樣,并將采樣結果依次保存到與電壓矢量編號數值相同的數組iMAX[n](n=0,1,2,3,4,5,6)中。將數組 iMAX[]中的數據順序進行比較取得最大值。例如,如果最大值為iMAX[3],則說明轉子當前位于以電壓矢量U3所對應方向為中心的前后30°區域內。這時再比較施加脈沖電壓矢量U2和U4后所響應的母線電流的大小,如果 iMAX[2]> iMAX[4],則可以進一步將轉子位置定位到P(3,2)所對應的30°區間內。但有一種特殊情況,如圖3所示,如果轉子位于兩個相鄰脈沖電壓矢量的中間區域,例如P(2,3)和P(3,2)兩塊區域的中心附近,這時位置判定結果就可能出現誤判情況。采用最大概率法,可以很好地解決這個問題。將脈沖電壓矢量連續循環施加數次,數組iMAX[]持續計數,取得iMAX[]中最終結果的最大值就是準確的轉子所處區間。
2 控制系統的硬件結構
本文所闡述的BLDCM有位置傳感器和無位置傳感器雙模式控制系統的硬件結構如圖4所示。
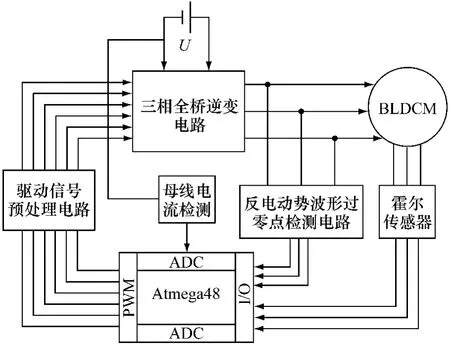
圖4 控制系統硬件結構圖
如圖4所示,該控制系統采用Atmel公司生產的Atmega48單片機作為主控芯片,處理器接收到轉子位置信號,轉換成與之相應的脈寬調制(Pulse Width Modulation,PWM)信號,通過驅動電路控制逆變電路中對應MOS管的開關狀態,以實現對電機運行的控制。
2.1 轉子位置信號獲取電路
轉子位置信號獲取電路包括霍爾傳感器電路(見圖1)和反電動勢波形過零點檢測電路(見圖2)兩個模塊。
霍爾傳感器電路將所獲得三路方波信號發送到單片機的三個I/O端口,處理器將定時掃描這三個端口以獲得轉子位置信號。
反電動勢波形過零點檢測電路將檢測到的三路反電動勢過零點方波信號同樣發送到單片機的三個I/O端口,處理器也將定時掃描這三個端口,獲得信號后還需依據當前轉速延時30°電角度時間才能得到準確轉子位置。
2.2 驅動電路
驅動電路由驅動信號預處理電路和三相全橋逆變電路兩個模塊組成。
利用單片機的三個定時/計數器的相位修正模式可以產生6路帶可編程死區的PWM信號。這6路PWM信號分別發送給逆變電路前的驅動信號預處理電路,預處理電路將處理器輸出的+5 VPWM信號轉換成有一定電流輸出能力的+15 V驅動信號施加到對應MOS管的柵極與源極之間以控制MOS管按需要邏輯開通或關斷。
全橋逆變電路由6個MOS管組成。逆變電路在設定邏輯順序的PWM信號控制下順序導通或關斷以實現電機的正常換相。
2.3 母線電流檢測電路
母線電流檢測電路通過檢測放置在母線負端回路里的康銅絲兩端的電壓以達到檢測母線電流的目的,獲得的電壓經過一級運放的信號處理后發送到單片機的AD采樣通道。
采樣到的電流值主要有三個作用:(1)用于無位置傳感器控制模式下定位轉子位置;(2)用于過流保護,當電流值大于某一閾值時直接關斷PWM輸出以防止電流過大造成的器件損壞;(3)用于限流判斷,當電流值大于限定值時減小PWM占空比,保證需要電流的輸出。
3 控制系統的軟件設計
該控制系統的軟件部分由C語言編寫完成,其主要內容包括:主控制程序、控制模式的自動判斷選擇程序、無位置傳感器靜止起動程序、調速程序等。
3.1 主程序
主程序的功能主要是工作模式的判斷、過流保護、限流調速。主程序的流程圖如圖5所示。
主程序開始后首先對單片機進行初始化操作,然后進入系統工作模式判斷選擇程序,在程序進行換向前先判斷電流是否達到過流保護,在電流安全的前提下進行閉環限流調速工作。
3.2 系統工作模式判斷程序
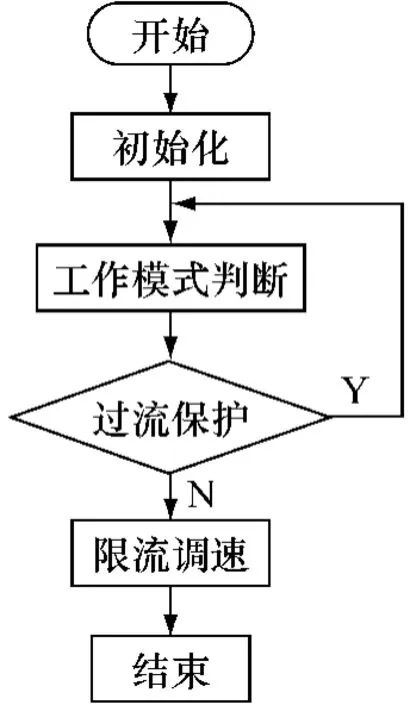
圖5 主程序流程圖
對系統的工作模式進行判斷選擇的主要依據是位置信號正常與否。當檢測到的A、B、C三相位置信號按照確定的順序(001-011-010-110-100-101)正常變化時,系統采用有位置傳感器工作模式;當檢測到的位置傳感器信號出現異常時,還要進一步進行判斷,如果位置信號只是固定在某一個正常數值或者在相鄰的兩個正常數值間循環跳變(如信號固定為001或者在001-011間反復跳變),則電機成了堵轉情況,需要按照堵轉保護進行處理,如果位置信號出現異常數值(000或111),或者數值隨機跳變的情況(如001直接變化到100),則系統應采用無位置傳感器工作模式。系統工作模式判斷選擇程序流程圖如圖6所示。
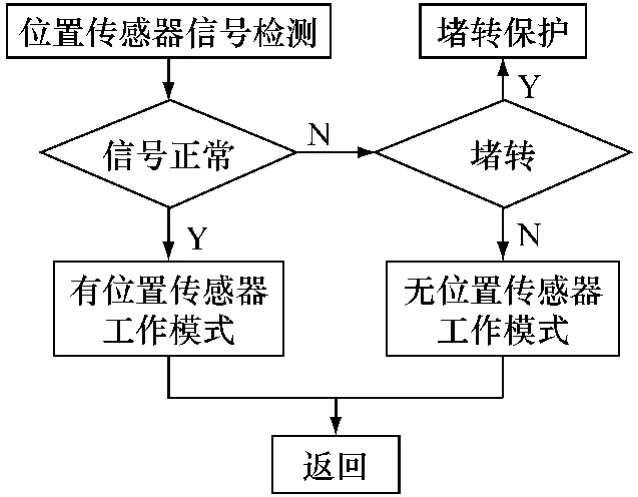
圖6 系統工作模式判斷選擇程序流程圖
3.3 無位置傳感器起動程序
BLDCM的有位置傳感器控制情況下,電機的起動控制程序較為簡單,只需依據位置傳感器檢測到位置信號,按照確定的換相對應表,用一定的PWM占空比控制導通逆變橋中相應相的MOS管即可實現電機的正常起動。無位置傳感器控制情況下的起動控制程序則要復雜得多。
無位置傳感器控制程序開始后,程序按照前文所述原理,向電機中依次施加短時脈沖電壓,同時控制程序利用A/D模塊持續監測母線電流響應情況,然后利用最大概率法就可以判定當前轉子位置,根據確定的換相對應表實現換相。通過試驗方法事先確定轉速閾值,當轉速大于閾值后,反電勢法可以檢測出正確的反電動勢過零信號,若轉速尚未達到閾值,則繼續施加短時脈沖電壓并進行轉子位置判斷。無位置傳感器起動程序如圖7所示。
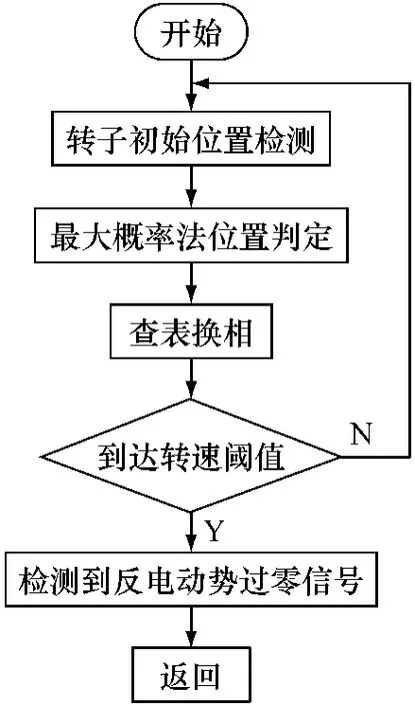
圖7 無位置傳感器起動程序
4 試驗結果
試驗中所采用的樣機基本參數如下:相電阻r=2.37 Ω,電感 L=0.004 32 H,極對數 p=24,額定電壓U=48 V。
試驗的硬件平臺如圖4所示。
無位置傳感器控制模式下,轉子初始位置檢測時,施加脈沖電壓采用周期為400 μs、占空比為100%的PWM信號,不同電壓矢量之間間隔5 ms。圖8為對應轉子某個位置,依次施加6個電壓矢量,直流母線端檢測到的電流波形。
由圖8可知施加脈沖電壓矢量U5后所檢測到的母線電流值 iMAX[5]最大,而且 iMAX[6]>iMAX[4],說明轉子此時位于 P[5,6]所對應的 30°區間內。為了防止誤判發生,將6個脈沖電壓矢量循環施加三次母線電流檢測結果累加計數,該次試驗得到轉子位置為P[5,6]區間,霍爾位置傳感器A、B、C三相此時位置信號為100(表示霍爾A信號為高電平,霍爾B、C信號為低電平),轉子位于以U5為中心的60°區間內,兩者判定結果吻合。
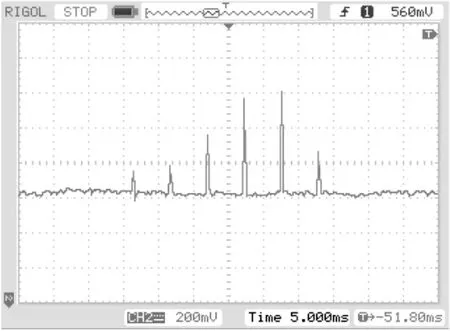
圖8 施加脈沖電壓后母線電流波形
當電機轉速達到閾值后,可以檢測出正確穩定的反電動勢過零信號,反電動勢波形檢測電路如圖2所示,由于電路結構中存在濾波延時成分,對過零信號產生了延時影響,令硬件延時時長為t1,延時30°電角度所需時間為t2,則檢測到反電動勢過零點后程序處理信號所需延時時長為t2-t1。B相反電動勢過零信號和B相霍爾位置信號波形圖如圖9所示。圖9中上面的波形為B相霍爾位置信號,下面的波形為B相的反電動勢過零信號。
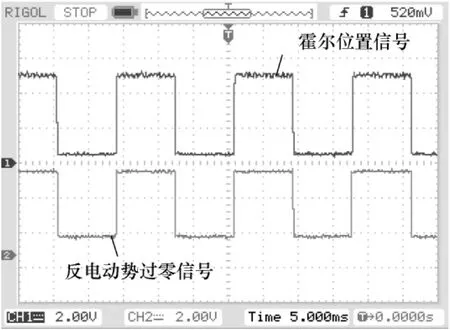
圖9 B相反電勢過零信號和霍爾位置信號波形圖
為了檢測系統的有、無位置傳感器工作模式自動判別選擇功能,在電機工作于有位置傳感器模式下正常運行時,拔掉B相的霍爾信號線,試驗證明控制器能夠自動平滑地轉到無位置傳感器模式繼續正常運轉,且在電機靜止后能夠在帶載的情況下正常起動。在1.5 kW測功機上測出的有位置傳感器和無位置傳感器兩種控制模式下電機工作效率最高時各項指標如表1所示。
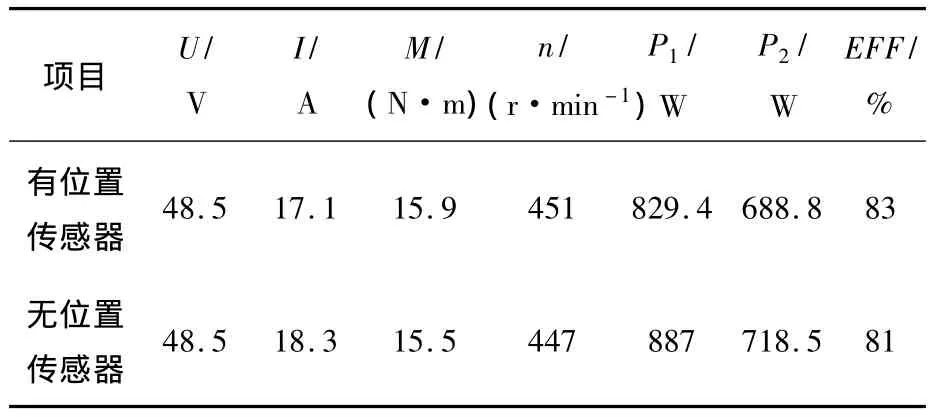
表1 電機工作效率最高時各項參數值
表1中:U為直流母線電壓;I為直流母線電流;M為電機輸出轉矩;n為電機轉速;P1為電機輸入功率;P2為電機輸出功率;EFF為電機最高工作效率。
試驗結果表明本文所闡述的BLDCM有位置傳感器和無位置傳感器雙模式控制的可行性,也證明了電機在兩種模式間能夠自動正確轉換并且在兩種工作模式下都有較高的工作效率。
5 結 語
BLDCM有位置傳感器和無位置傳感器雙模式控制器能夠較好地解決在單一工作模式下工作的不足之處,具有更強的安全性與可靠性。控制系統結構簡單,制造成本較低,無需更改現有BLDCM結構就能直接使用,具有較廣的市場應用前景。
[1]LeeWook Jin,Sul Seung Ki.A new starting method of bldc motors without position sensor[J].IEEE Trans Industrial Electronics,2004(4):2397-2402.
[2]張琛.直流無尉電動機原理及應用[M].北京:機械工業出版社,1996.
[3]呂志勇,江建中.永磁無刷直流電機無位置傳感器控制綜述[J].中小型電機,2000,27(4):33-36.
[4]羅隆福,楊艷.BLDCM無位置傳感器換相檢測和開環起動的軟件實現[J].微特電機,2002,30(3):39-41.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25