電動自行車用無刷直流電機控制系統設計
2011-06-02 05:32:18鐘曉偉宋蟄存東北林業大學機電工程學院黑龍江哈爾濱150040
電機與控制應用 2011年1期
鐘曉偉, 宋蟄存, 許 剛(東北林業大學機電工程學院,黑龍江哈爾濱 150040)
0 引言
無刷直流電機(Brushless DC Motor,BLDCM)是隨著新型電力電子器件和永磁材料的發展而成熟起來的一種新型電機,它屬于同步電機的范疇,既具有交流電機運行可靠的優點,又具有傳統有刷直流電機優越的調速性能,因此具有廣泛的應用前景。電動自行車用電機已由早期的傳統直流電機發展到BLDCM階段,BLDCM控制系統一般有兩種形式:復雜的純模擬器件構成的控制器和以微控制器為核心的數字式控制器,數字式控制器使電動自行車控制器設計更靈活,功能更豐富,因而得到廣泛應用[1-2]。
1 電動自行車控制系統結構
電動自行車由車體、電驅動裝置(電機)、可充電電池、充電器和控制系統五大部分組成。由蓄電池提供電源,電動機接通電源后,產生旋轉磁場,由電動機發出動力,傳給驅動輪而產生牽引力,使車輪旋轉前進。在控制器上連接一個轉動手柄,轉動手柄可以控制控制器輸送給電動機的電壓,通過變換電機繞組電壓來控制電動機的轉速,從而控制電動自行車車速。BLDCM主要由電動機本體、位置傳感器和電子開關線路(逆變器)三部分組成[2]。以BLDCM為驅動電機的電動自行車控制系統結構如圖1所示。
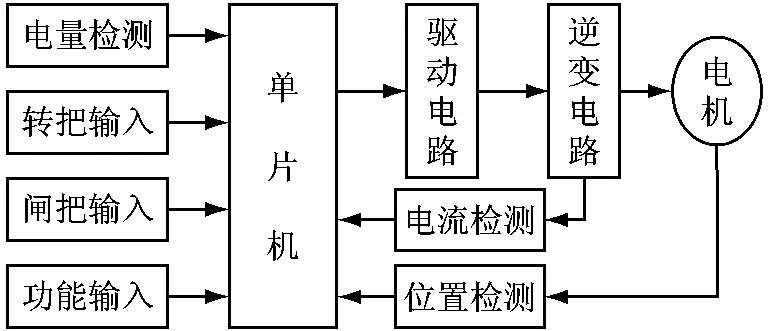
圖1 電動自行車控制系統結構圖
電動自行車用無刷電機控制系統主要包括以下幾個部分:以單片機為核心的主控模塊,轉把、閘把輸入電路;電機換向驅動電路;相電流、轉子位置檢測電路[3]。
單片機作為主控芯片,其主要功能是實現復雜的電機控制算法,包括傳統的PID控制,以及近年來針對無刷電機非線性、強耦合特性而提出的模糊控制和神經網絡控制;BLDCM沒有電刷和換向器,實現電子換向要依靠轉子位置傳感器的輸入為電機提供正確的換向時序,控制逆變電路中功率開關管的通斷,使電機繞組按一定時序通斷產生旋轉磁場,驅動電機不斷旋轉。控制器可通過采樣轉子位置傳感器的固定時間內電平翻轉次數,經過適當運算可計算出電機速度反饋輸入;BLDCM具有和一般直流電動機基本相同的調速特性,只要改變電機的輸入電壓或勵磁電流的大小,就可以方便地進行無級調速,因此控制器多采用自帶脈寬調制(Pulse Width Modulation,PWM)輸出功能的MCU;實際運行過程中由于負載變化可能導致電機繞組過流,電流檢測可作為控制器中斷輸入,發生過流時封鎖逆變電橋功率開關管,避免損壞電機,也可作為雙閉環電流內環的電流反饋環節使用。
2 BLDCM控制策略
BLDCM轉速負反饋單閉環控制系統可以在保證系統穩定的條件下實現轉速無靜差,但不能完全按照需要來控制動態過程的電流和轉矩,因而在對動態性能要求不高的場合可以采用。如果對系統的動態性能要求較高,例如要求快速起動、制動等,單閉環控制系統就難以滿足要求。為了改善BLDCM控制系統的動態特性,就很有必要在速度負反饋單閉環控制系統的基礎上再引入電流負反饋環來控制系統動態過程的電流和轉矩。對于自行車電機控制系統,為了滿足無超調、抗負載擾動能力強、實時性和快速響應性好的要求,采用轉速環、電流環雙閉環控制策略。電流內環采用經典PI調節,速度外環采用傳統的PID調節器,雙閉環控制系統結構如圖2所示[4]。
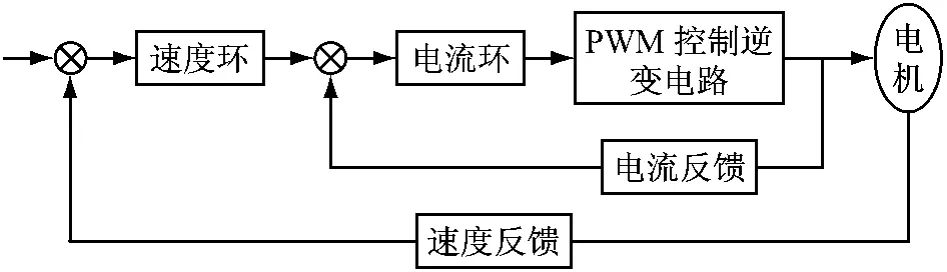
圖2 BLDCM雙閉環控制系統結構圖
3 控制系統硬件設計
3.1 主控模塊
ATmega16是低功耗、高性能8位CMOS微控制器。由于其先進的精簡指令集以及單時鐘周期指令執行時間使得ATmega1的數據吞吐率高達16 MIPS/16 MHz。AVR內核具有豐富的指令集和32個通用工作寄存器,所有的寄存器都直接與算術邏輯單元(ALU)相連,使得一條指令可以在一個時鐘周期內同時訪問兩個獨立的寄存器。ATmaga16單片機自帶8路10位模數轉換器,4通道PWM,由于電動自行車轉把、電機相電流輸入都是模擬量,非常適合用作電動自行車控制器[5]。
基于ATmega16單片機的電動自行車用BLDCM控制器主控模塊如圖3所示,單片機片外接口主要包括:電池電量檢測輸入接PA0口;轉把調速模擬輸入量接PA1口,閘把數字量輸入接PB0口;附加功能輸入包括防盜、EABS、巡航;三個霍爾轉子位置傳感器輸入Ha、Hb、Hc;電流模擬量輸入接單片機的PA2口,過流保護中斷請求連接單片機的INT0;逆變電路中功率開關管驅動輸出,上橋臂三個開關管PWM控制,下橋三個開關管常開,實現無刷電機電子換向及無級調速。
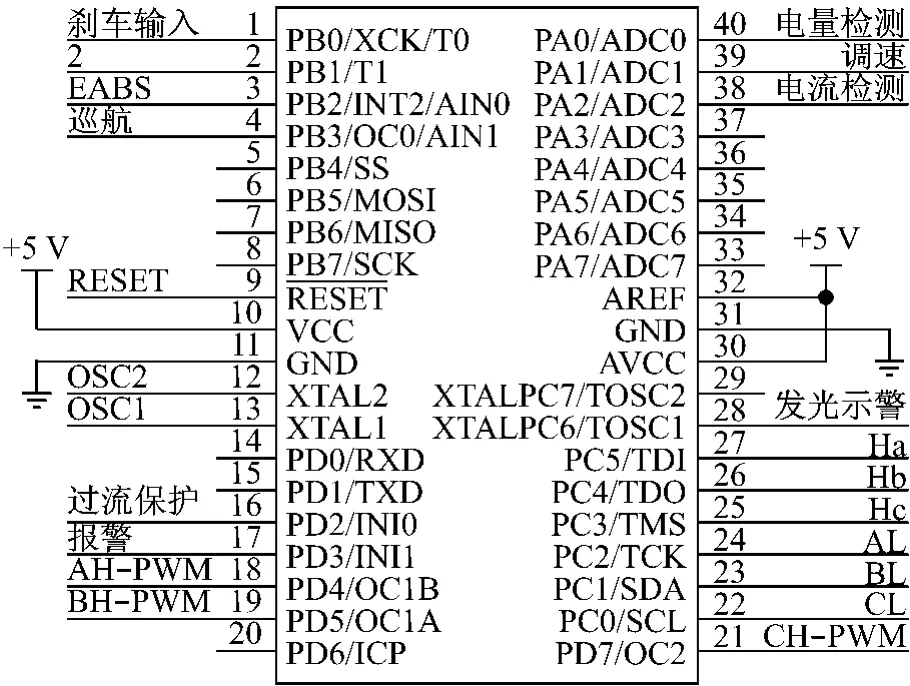
圖3 主控模塊
3.2
信號輸入處理電路
3.2.1 霍爾信號輸入與報警電路
轉子位置檢測電路在系統中的作用有兩個:①檢測電機定、轉子的相對位置為逆變電路提供正確的換相信號;②通過檢測某路霍爾脈沖信號的個數,計算后轉換為速度信號,構成速度反饋環節[4],霍爾信號輸入處理及報警電路如圖4所示。
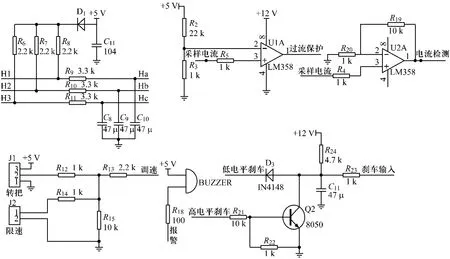
圖4 信號處理及報警電路
3.2.2 轉把調速與閘把剎車輸入電路
市場上大多數電動自行車的轉把為霍爾轉把,霍爾轉把輸出與轉動幅度成正比的模擬電壓值,送到單片機的模數轉換端口,單片機通過片內集成的A/D轉換器將輸入轉化為數字量,運算后根據控制算法輸出占空比合適的PWM信號,從而實現電機轉速控制。
閘把信號是電機停止轉動的制動信號。電動自行車閘把的位置傳感元件一般為開關型霍爾感應元件(分剎車低電位和剎車高電位兩種)。電子低電位閘把的剎車信號是常高電位,當剎車時,閘把內部的霍爾元件信號翻轉,其信號變成低電位。電子高電位閘把的剎車信號是常低電位,當剎車時,閘把內部的霍爾元件信號翻轉,其信號變成高電位。該控制器兼容低電平與高電平剎車輸入。轉把與閘把輸入電路如圖4所示。
3.2.3 電流檢測電路
對于三相六狀態BLDCM,任一時刻只有兩相繞組導通,電流從一相繞組流進,從另一相繞組流出,電流大小與直流側電流大小相等。在直流側串聯一個采樣電阻即可檢測導通相的相電流[2]。
LM324(U1A)構成一個電壓比較器,把檢測的電流信號與已知電壓比較,得到過流輸出信號,過流時比較器翻轉觸發單片機中斷,及時關斷功率開關管。內部電流環電流通過一個由LM324(U2A)運算放大器構成的同相比例放大電路來獲得,經放大后轉化為與電流成正比的電壓信號送入單片機PA2口。
3.3 輸出驅動電路
3.3.1 IR2130驅動電路
IR2130是MOS、IGBT功率器件專用柵極驅動芯片,通過其內部自舉電路,能同時驅動橋式電路中低壓側和高壓側的功率元件。IR2130具有6路輸入信號和6路輸出信號,且只需一個供電電源即可驅動三相橋式逆變電路的6個功率開關器件,使整個驅動電路更加簡單可靠。IR2130引腳如圖5所示,高壓側通道的輸出驅動電源是通過自舉技術獲得的,高壓側的柵極電荷由自舉電容C7、C8、C9提供。自舉電容在器件斷態時通過自舉二極管被12 V充電,且為了防止自舉電容兩端電壓放電,3個自舉二極管D4、D5、D6應選用高頻快恢復二極管[6]。
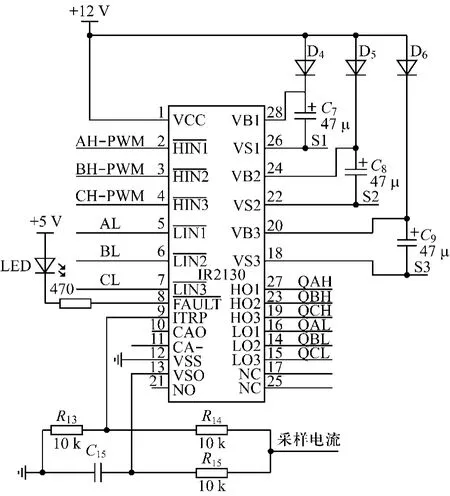
圖5 IR2130驅動電路
單片機根據霍爾傳感器輸入信號經內部邏輯處理輸出6個控制信號,分別送到IR2130的2~7管腳,經IR2130內部處理產生6路驅動信號分別驅動逆變電橋中6個功率MOSFET管。通過電阻RS檢測到的電流信號分別送給IR2130的9腳(過電流信號檢測輸入端)和13腳(放大器同相輸入端)。當外電路發生過流或直通時,引腳9端電壓高于0.5 V時,內部保護電路使IR2130輸出驅動信號全為低電平,6只功率管全部截止,起到保護作用。
3.3.2 驅動電路設計
BLDCM的三相六狀態控制方式是每次使逆變電橋中兩個開關管同時導通,每隔60°電角度改變一次導通狀態,每改變一次狀態更換一個開關管。ATmega16單片機僅四路PWM輸出,不可能對6只功率開關管進行PWM控制。因此采用HPWM-LON控制方式,即上橋臂開關管進行PWM控制,下橋臂開關管保持常開。BLDCM的A相繞組驅動電路如圖6所示[6]。
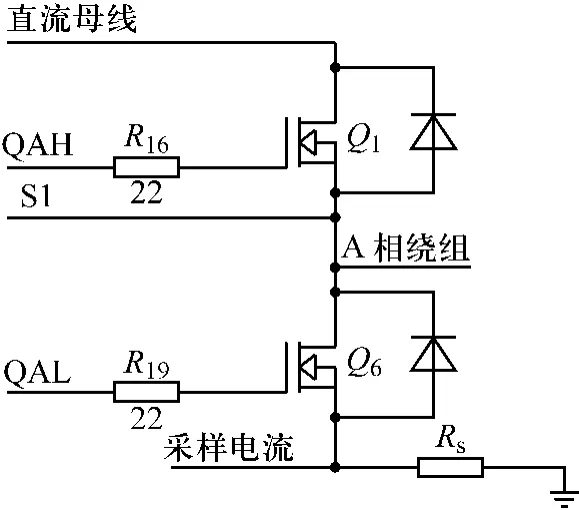
圖6 單相繞組驅動連接圖
4 調節器參數確定
以兩相同時導通星形三相六狀態為例,分析
BLDCM的數學模型。考慮理想情況:三相繞組完全對稱,且在定子內表面均勻連續分布;氣隙磁場為方波,定子電流、轉子磁場分布對稱;磁路不飽和,不計渦流和磁滯損耗;忽略電樞反應、齒槽及換向的影響。得到BLDCM的轉速傳遞函數為[7]

式中:L——三相定子自感;
R——每相定子繞組電阻;
KT——電磁轉矩常數;
Ke——反電動勢常數;
KD——轉動部分阻尼系數;
J——轉動慣量。
由式(1)可知轉速大小與繞組電壓成正比。
根據系統的數學模型,采用樣機參數如下:額定電壓U=36 V,額定轉速為1 500 r/min,相電阻R=1 Ω,定子相繞組自感L=0.02 H,互感 M=-0.006 mH,轉動慣量 J=0.005 kg·m2,極對數為2。反電勢系數 Ke=0.072 v/rad·s-1。在MATLAB/Simulink圖形化建模環境下,利用系統仿真基本模塊搭建了控制器的仿真模型。仿真結果如圖7所示。其中速度PID調節器三個參數取值為 kp=14,ki=6.7,kd=1.4。電流 PI調節器兩個參數取值為kp=4.9,ki=3.4。
5 系統軟件設計
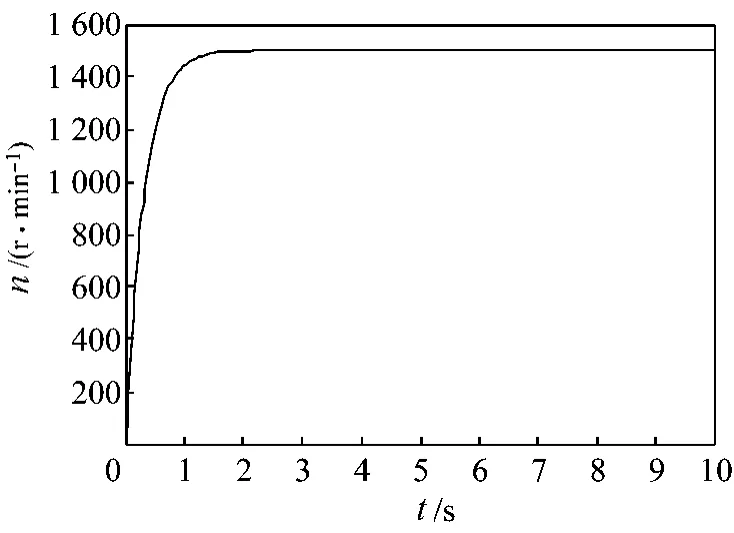
圖7 系統仿真波形
控制系統軟件設計采用模塊化思想,C語言編程。電動自行車BLDCM控制系統的軟件主要實現BLDCM轉子位置的檢測、轉速的計算、電流與轉速的調節、PWM信號的生成及故障信號的處理等功能[8]。因此,系統軟件設計主要包括初始化子程序,霍爾信號采集子程序,閘把、轉把輸入信號采集,速度環、電流環運算子程序,中斷服務子程序等。主程序流程圖如圖8所示。
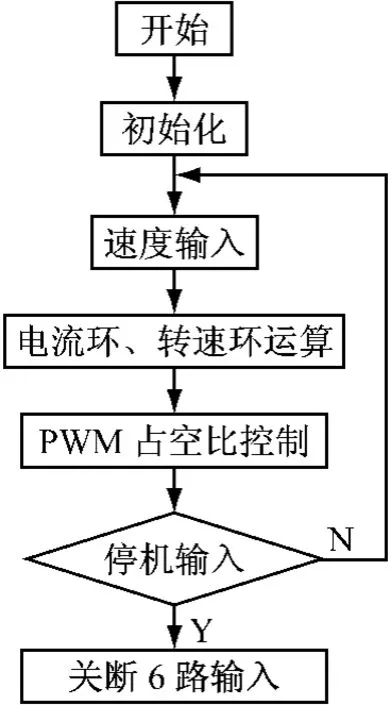
圖8 主程序流程圖
6 結語
以ATmega16單片機為控制核心設計的電動自行車用BLDCM控制器,具有比傳統純模擬控制器更好的控制效果,更易實現電機的智能化控制、增加附加功能。功率器件專用驅動芯片IR2130使得電機驅動電路得以簡化,減少了外圍元件,提高了控制器可靠性。
[1]王小明.電動機的單片機控制[M].北京:北京航空航天大學出版社,2002.
[2]張強,吳紅星.基于單片機的電動機控制技術[M].北京:中國電力出版社,2008.
[3]李胤昌,鄭日榮.基于PIC單片機的電動自行車控制系統設計[J].現代電子技術,2009,32(8):136-138.
[4]尹衍辰,范瑜.基于DSC的永磁無刷直流電機控制器設計[J].微電機,2005,38(2):25-28.
[5]楊正忠,耿德根.AVR單片機應用開發指南及實例精解[M].北京:中國電力出版社,2008.
[6]謝運祥,歐陽森.電力電子單片機控制技術[M].北京:機械工業出版社,2007.
[7]張琛.直流無刷電動機原理及應用[M].2版.北京:機械工業出版社,2004.
[8]董學明,范承志.電動自行車用智能型無刷直流電機驅動器[J].微電機,2006,39(2):97-99.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00