探頭自動起落控制在無縫管超聲波檢測中的研究
2011-05-11 02:48:40張文潔
制造業自動化 2011年1期
張文潔, 王 左
(遼寧科技大學,鞍山 114051)
探頭自動起落控制在無縫管超聲波檢測中的研究
張文潔, 王 左
(遼寧科技大學,鞍山 114051)
0 引言
在無縫管超聲波自動探傷過程中,由于探頭數目較多(一般為8的倍數),因此在檢測過程中,為了保證每個探頭能夠進行有效范圍的檢測,必須采用相應的控制措施保證探頭能夠依次起落,這樣才能夠控制掃描盲區(50mm以內)并符合自動化探傷的需求。探頭自動起落控制屬于電控的一部分,其基本原理是:計算機首先通過檢測光電開關的信號,判斷鋼管是否進入探傷區,在固定的間隔內,得到水平行車的運行速度和距離,根據每個探頭與光電開關的位置關系,判斷探頭的起與落。其工藝過程如圖1所示:
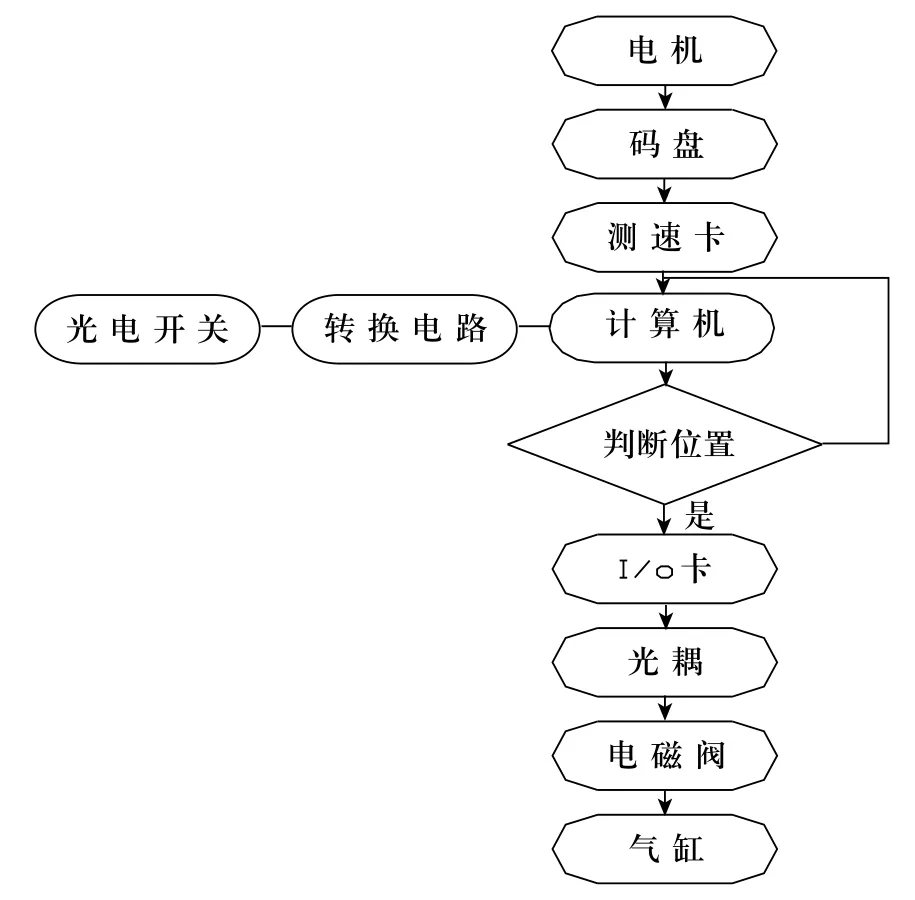
圖1 探頭起落控制工藝過程圖
1 探頭起落控制工藝過程分析
在實際應用中,判斷鋼管是否進入探傷區是由對射式光電開關所控制,對射式光電開關在通斷的情況下分別有有+24v與0v兩個電壓值,通過轉換電路的作用,轉換為+5v與0v兩個電壓值,當鋼管進入探傷區后遮住光電傳感器,接收端不能得到光信號,計算機就得到一個低電平,反之計算機就得到一個高電平。經過這樣的判斷,可以確認鋼管是否運行在探傷區,一旦鋼管進入探傷區,通過監測行車的水平速度,不斷的判斷探頭架上各組探頭當前的運行位置,并根據各組探頭與光電開關的實際距離,分別給出各組探頭的落信號,控制探頭的落動作。當鋼管離開探傷區時,光電開關的接收斷得到光信號,同時計算機檢測各組探頭與光電開關的位置,并根據各組探頭與光電開關的實際距離,分別給出各組探頭的起信號,控制探頭的起動作。由于探頭的起落過程中,針對每組探頭,相差一個探頭體的距離,因此,探頭的起落控制距離是不一致的,所以要求在實際的應用中,分別給出各組探頭的起落距離,如圖2所示。
行車帶動探頭架的運動過程中,每組探頭的起落位置的檢測是由光電增量碼盤來實現的,計算機在每個檢測周期T=50ms內,就可以得到當前時間段內的行車運行距離ΔLi( 測速卡每讀一次清零),則總的運行距離L為:
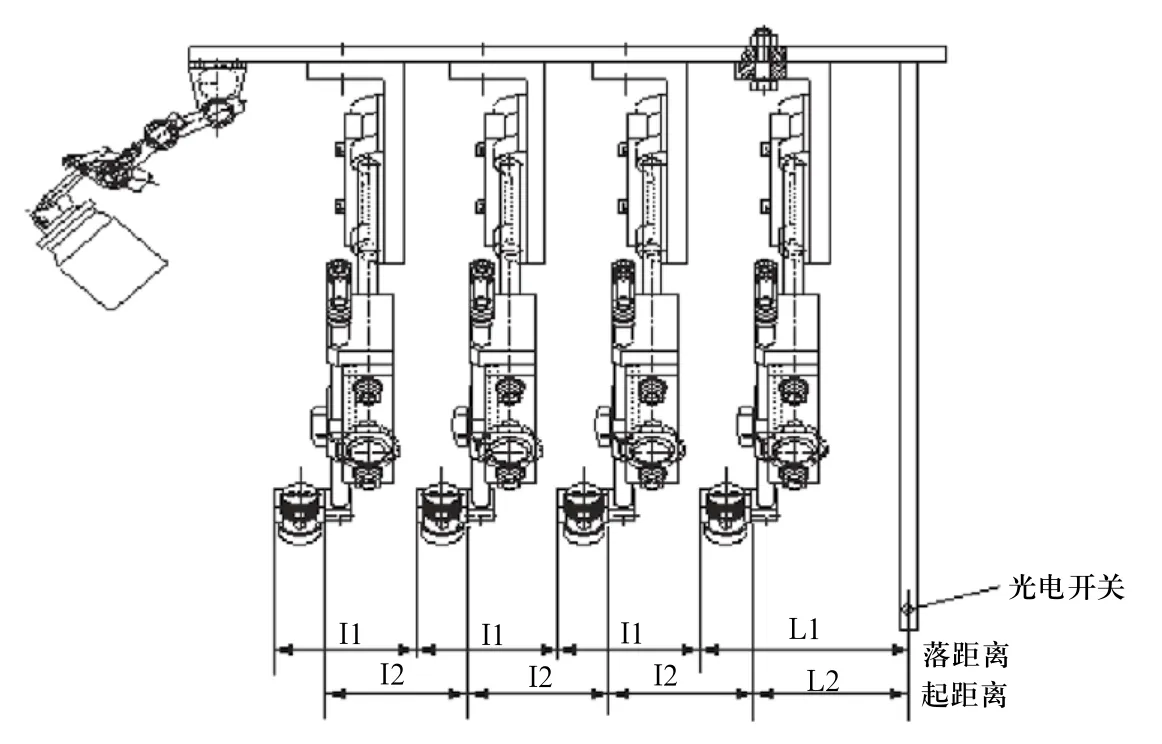
圖2 探頭起落位置示意圖
計算機每次檢測周期固定,為T=50ms,當計算機通過接口得到當前時刻行車的運行位移時,也可得到行車的運行速度Vi, 為以后的螺距控制提供依據。
根據光電開關提供的檢測信息,不斷判斷L的距離,根據起落位置的不同要求,分別實現對各組探頭的起落控制。
2 控制程序設計
計算機在進行信號采集之后,為了避免干擾,一般都進行相應的數字濾波預處理。預處理的主要任務是去除混雜在有用信號中的各種干擾信號,在設計中采用滑動平均濾波法。該方法采用循環隊列作為采樣數據存儲器,隊列長度為n,每進行一次新的采樣,把采樣數據放到隊尾,扔掉原來隊首的一個數據。這樣,在隊列中始終有n個最新的數據。對這n個最新數據求取平均值,作為此次采樣的有效數據。這種方法每采樣一次,便得到一個有效采樣值,因而速度快,實時性好,對周期性干擾有良好的抑制作用。滑動平均濾波的流程圖如圖3所示:
在實際應用中,取n=3,數據經過處理后,得到相應的行車運行速度,依據前面的分析,進行探頭起落控制的程序流程圖如圖4所示:
本程序使用VC++6.0開發,部分程序及說明如下:
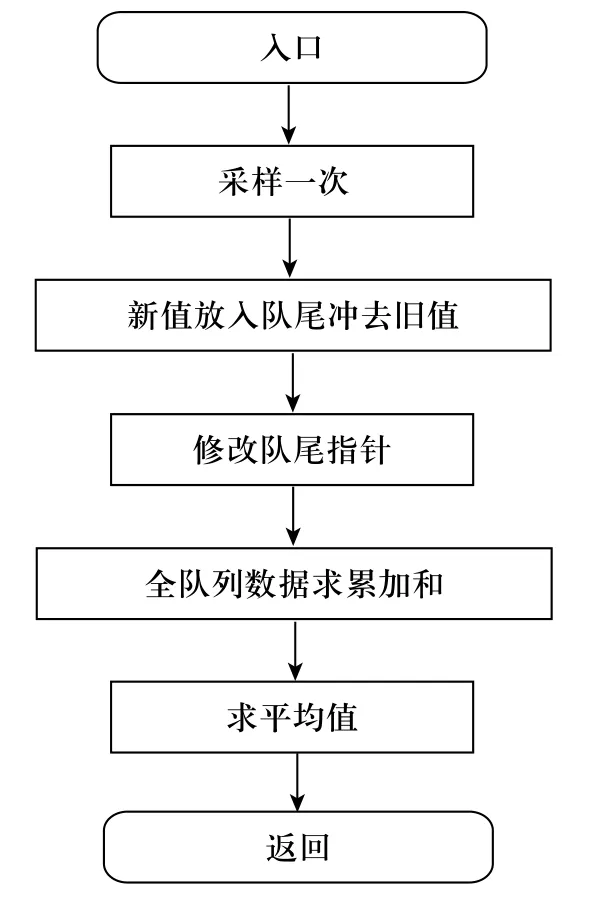
圖3 滑動平均濾波流程圖
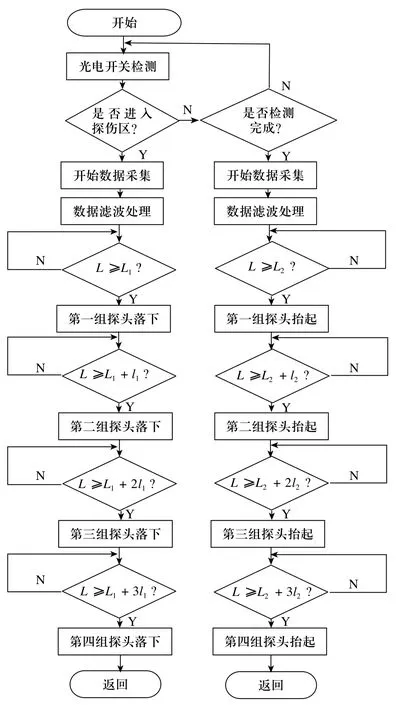
圖4 探頭起落控制的程序流程圖



3 結束語
針對探頭的起落控制進行了分析,使掃描盲區在50mm能夠很好的實現,但在實際的應用中,為了進一步減少其掃描盲區,必須考慮影響其起落位置的因素,主要有:
1)由于探頭的起落靠氣缸來執行,執行元件在得到起落信號后會有一個時間的延遲(0.2~0.4s,因探頭與鋼管的距離的不同而不同);
2)行車在運行中與軌道的打滑現象也對位置精度產生影響;
3)計算機的檢測時間對位置精度的影響。
因此,為了更好的實現探頭的起落控制,根據不同的現場情況,可適當的調整水平行車的滑移系數;在計算速度允許的情況下盡量縮短檢測時間;在計算中充分考慮探頭的起落時間。這樣,能在原有的基礎上能夠進一步縮小檢測盲區。
[1]王仲生, 無損檢測診斷現場實用技術, 2002.
[2]譚浩強,C程序設計[M]. 清華大學出版社, 2003.
[3]向世明.Visual C++數字圖象與圖形處理[M]. 電子工業出版社, 2001.
[4]喬林,楊志剛.Visual C++數字圖象與圖形處理[M]. 中國鐵道出版社, 1999.
Probe lifting control research based on seamless ultrasonic test
ZHANG Wen-jie, WANG Zuo
由于無縫管的廣泛應用,對于無縫管自動超聲檢測的要求越來越高,而探頭的自動起落是自動化探傷中的重要問題之一。為了保證每個探頭能夠進行有效范圍的檢測,減少其掃描盲區,設計考慮到執行元件得到起落信號的延遲、行車在運行中與軌道的打滑現象及計算機的檢測時間對位置精度的影響等多種因素對其的影響并在程序中對其加以解決。
無縫管;探頭;超聲檢測;起落
張文潔(1963-),女,遼寧鞍山人,副教授,碩士,主要從事機械電子、數控加工等方面的研究工作。
TP273
B
1009-0134(2011)1(上)-0015-04
10.3969/j.issn.1009-0134.2011.1(上).04
2010-07-21
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2018年11期)2018-08-04 03:25:42
消費導刊(2017年20期)2018-01-03 06:26:40
海峽科技與產業(2016年3期)2016-05-17 04:32:12
