電動(dòng)車組交流傳動(dòng)系統(tǒng)的硬件在回路實(shí)時(shí)仿真研究*
2011-05-04 03:39:10馬志文崔恒斌
鐵道機(jī)車車輛 2011年2期
馬志文,李 偉,崔恒斌,韓 坤
(1 中國鐵道科學(xué)研究院機(jī)車車輛研究所,北京100081;2 西南交通大學(xué) 電氣工程學(xué)院,四川成都610031)
在研制電動(dòng)車組大功率交流傳動(dòng)系統(tǒng)的過程中,必須對(duì)日趨復(fù)雜的牽引控制裝置進(jìn)行充分的測試驗(yàn)證和參數(shù)整定,并排除實(shí)時(shí)軟件在編程、中斷、接口及通訊等方面的錯(cuò)誤。如果沒有完全消除牽引控制實(shí)時(shí)軟件存在的隱患,就采用實(shí)際交流傳動(dòng)系統(tǒng)進(jìn)行閉環(huán)聯(lián)調(diào)試驗(yàn)是非常危險(xiǎn)的。
以某型動(dòng)車組的交流傳動(dòng)系統(tǒng)為例,引入硬件在回路實(shí)時(shí)仿真技術(shù)[1,2],即將交流傳動(dòng)系統(tǒng)主回路代之以實(shí)時(shí)仿真模型,并與實(shí)際的牽引控制裝置相連構(gòu)成硬件在回路(Hardware-in-the-loop,簡稱HIL)閉環(huán)仿真測試系統(tǒng),以實(shí)現(xiàn)對(duì)牽引控制裝置的實(shí)時(shí)仿真測試與驗(yàn)證。論述了基于MATLAB/SIMULINK軟件的交流傳動(dòng)系統(tǒng)主回路仿真模型,介紹了基于dSPACE實(shí)時(shí)仿真器的HIL仿真測試系統(tǒng)結(jié)構(gòu),并給出了實(shí)時(shí)仿真測試的結(jié)果。
1 交流傳動(dòng)系統(tǒng)仿真模型
圖1是某型電動(dòng)車組交流傳動(dòng)系統(tǒng)的結(jié)構(gòu)示意圖,它主要由接觸網(wǎng)(單相25 kV/50 Hz)、牽引變壓器、四象限變流器(兩重化結(jié)構(gòu))、中間直流回路、PWM 逆變器、牽引電機(jī)(4臺(tái)并聯(lián))及牽引控制裝置等部分組成。

圖1 某型電動(dòng)車組交流傳動(dòng)系統(tǒng)結(jié)構(gòu)示意圖
從系統(tǒng)級(jí)仿真角度考慮,建立圖1所示交流傳動(dòng)系統(tǒng)的仿真模型,不僅要實(shí)現(xiàn)電動(dòng)車組交流傳動(dòng)系統(tǒng)各種運(yùn)行工況的模擬,而且還要滿足硬件在回路仿真的實(shí)時(shí)性要求。在進(jìn)行硬件在回路仿真測試時(shí),需要對(duì)實(shí)際控制器輸出的控制信號(hào)進(jìn)行采樣,必然造成仿真器的輸入滯后于實(shí)際控制器的輸出,而且延遲時(shí)間是隨機(jī)的,最大的延遲時(shí)間等于仿真時(shí)間步長。為了抑制采樣延遲對(duì)仿真計(jì)算精度的影響,應(yīng)該控制仿真器的時(shí)間步長遠(yuǎn)小于控制器的控制周期[3]。
仿真建模時(shí),按照模塊化建模原則,對(duì)于牽引變壓器、四象限變流器、中間直流回路、PWM 逆變器、牽引電機(jī)等主要部件,建立各自合適的簡化數(shù)學(xué)模型,以此為基礎(chǔ),采用SIMULINK模塊與高效率C-MEX語言編寫的S函數(shù)相結(jié)合的建模方法構(gòu)造整個(gè)交流傳動(dòng)系統(tǒng)的仿真模型[4,5]。
1.1 牽引變壓器模型
忽略磁滯損耗、磁鏈飽和等因素影響,同時(shí)不計(jì)短路阻抗(放于四象限變流器模型中考慮),建立如下牽引變壓器數(shù)學(xué)模型:

1.2 四象限變流器模型
建立四象限變流器模型時(shí),將IGBT開關(guān)器件簡化為理想開關(guān)(忽略開關(guān)時(shí)間、導(dǎo)通壓降、開關(guān)損耗等因素的影響),并考慮反并聯(lián)二極管的作用。牽引變壓器短路阻抗(即漏電感)及預(yù)充電電路模型一并在四象限變流器模型中考慮。
四象限變流器的主電路如圖2所示,由牽引變壓器漏電感Ls、漏電阻 Rs、線路開關(guān) SK、預(yù)充電電阻RP、預(yù)充電開關(guān)SP和2個(gè)開關(guān)橋臂組成,其中每個(gè)橋臂包含2個(gè)IGBT開關(guān)器件,并且每個(gè)IGBT與1個(gè)二極管反向并聯(lián)。

圖2 四象限變流器主電路圖
為了便于分析說明,首先定義2個(gè)開關(guān)函數(shù)如下:

當(dāng)四象限變流器不受脈沖控制時(shí),4個(gè)IGBT器件都處于封鎖狀態(tài),此時(shí)相當(dāng)于一個(gè)單相橋式不控整流器。此時(shí)開關(guān)函數(shù)如表1所示。當(dāng)電流is=0時(shí),如果單相交流電壓uab的絕對(duì)值|uab|大于直流電壓Ud時(shí),不控整流器啟動(dòng);否則不啟動(dòng)。當(dāng)電流is≠0時(shí),說明不控整流器已經(jīng)啟動(dòng),可通過電流is的流動(dòng)方向來判斷兩個(gè)橋臂二極管的通斷。實(shí)際仿真建模中,通常設(shè)定一個(gè)很小的容差ΔIs(≈0)對(duì)電流is進(jìn)行零點(diǎn)判斷。

表1 四象限變流器開關(guān)表
當(dāng)四象限變流器受脈沖控制時(shí),a、b相的通斷由四路IGBT 脈沖 P1、P2、P3、P4決定,此時(shí)開關(guān)函數(shù)如式(4)所示。


根據(jù)交流電壓uab,按式(6)微分方程可以計(jì)算出四象限變流器的交流輸入電流is。式(6)中,KP代表預(yù)充電開關(guān)SP狀態(tài),當(dāng)SP接通(線路開關(guān)SK必?cái)嚅_)時(shí),KP=1;否則KP=0。

根據(jù)交流輸入電流is,可以得出直流輸出電流id如式(7)所示。

1.3 中間直流回路模型
中間直流回路如圖3所示,它包括串聯(lián)諧振電路Lf,Cf和支撐電容Cd等部分。

圖3 中間直流回路的電路圖
圖3所示電路的數(shù)學(xué)模型可以描述為:

1.4 PWM逆變器模型
PWM逆變器的主電路拓?fù)浣Y(jié)構(gòu)如圖4所示,它由3個(gè)開關(guān)橋臂組成,其中每個(gè)橋臂包含2個(gè)IGBT開關(guān)器件,并且每個(gè)IGBT與1個(gè)二極管反向并聯(lián)。n是逆變器三相負(fù)載的中性點(diǎn)。
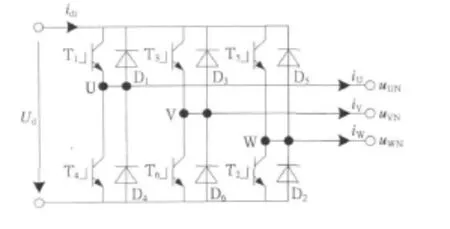
圖4 PWM逆變器電路拓?fù)浣Y(jié)構(gòu)
建立模型時(shí),將IGBT開關(guān)器件簡化為理想開關(guān)(忽略開關(guān)時(shí)間、導(dǎo)通壓降等因素的影響),并考慮反并聯(lián)二極管的作用。為了便于分析,定義開關(guān)函數(shù)(x=U,V,W):

每個(gè)時(shí)刻三相橋臂均有一個(gè)開關(guān)器件處于導(dǎo)通狀態(tài),且同一橋臂兩開關(guān)器件不能同時(shí)導(dǎo)通,否則會(huì)造成貫穿短路故障。由此得出PWM逆變器的數(shù)學(xué)模型,如式(10)所示:

1.5 牽引電機(jī)模型
建立三相異步牽引電機(jī)數(shù)學(xué)模型時(shí),忽略空間諧波,設(shè)三相繞組對(duì)稱,所產(chǎn)生的磁動(dòng)勢沿氣隙圓周按正弦規(guī)律分布;忽略磁路飽和,各繞組的自感和互感都是恒定的;忽略鐵芯損耗;并且不考慮頻率和溫度變化對(duì)繞組電阻的影響。
異步電機(jī)在兩相靜止坐標(biāo)系(α-β)上的數(shù)學(xué)模型可以描述為式(11)~式(16)。

式中 usα,usβ為定子電壓 α,β 軸分量;isα,isβ為定子電流α,β軸分量;ψrα,ψrβ為轉(zhuǎn)子磁鏈 α,β軸分量;ω為電機(jī)旋轉(zhuǎn)角頻率;Te為電磁轉(zhuǎn)矩;TL為負(fù)載轉(zhuǎn)矩;p為微分算子,Rr為定子、轉(zhuǎn)子電阻;Ls,Lr為定子、轉(zhuǎn)子自感;為激磁電感;σ=1-/LsLr,為漏磁系數(shù);Tr=Lr/Rr為轉(zhuǎn)子時(shí)間常數(shù)為電機(jī)極對(duì)數(shù);J為轉(zhuǎn)動(dòng)慣量。
電機(jī)在兩相靜止坐標(biāo)系下的電壓 usα,usβ,由三相電壓uUN,uVN,uWN經(jīng)3相/2相變換(按照等效電機(jī)原則)得到式(17)。


電機(jī)負(fù)載轉(zhuǎn)矩TL,由列車阻力R按照式(19)折算公式得出。

式中Di為動(dòng)輪直徑;n為整列車配置的牽引電機(jī)臺(tái)數(shù);ηc為齒輪傳動(dòng)效率;μc為齒輪傳動(dòng)比。
2 硬件在回路仿真測試系統(tǒng)構(gòu)成
基于"實(shí)際控制器+虛擬被控對(duì)象"模式,建立電動(dòng)車組交流傳動(dòng)系統(tǒng)的硬件在回路實(shí)時(shí)仿真測試系統(tǒng),如圖5所示。它主要由dSPACE實(shí)時(shí)仿真器、牽引控制裝置、接口箱、IO模擬操作面板、MVB網(wǎng)絡(luò)模擬器及工控機(jī)等部分組成。

圖5 硬件在回路仿真測試系統(tǒng)結(jié)構(gòu)示意圖
牽引控制裝置為電動(dòng)車組的實(shí)際牽引控制器,是主要的仿真測試對(duì)象。dSPACE實(shí)時(shí)仿真器和IO模擬操作面板一起用于模擬與牽引控制裝置相關(guān)聯(lián)的外部環(huán)境(包括交流傳動(dòng)系統(tǒng)主回路、二進(jìn)制開關(guān)量、傳感器模擬量等,但不包括MVB通訊網(wǎng)絡(luò))。接口箱用于實(shí)現(xiàn)牽引控制裝置與dSPACE仿真器之間的信號(hào)連接、調(diào)理及轉(zhuǎn)換。MVB網(wǎng)絡(luò)模擬器用于模擬牽引控制裝置的MVB網(wǎng)絡(luò)環(huán)境。工控機(jī)內(nèi)安裝有 MATLAB軟件及dSPACE相關(guān)軟件,用于實(shí)現(xiàn)SIMULINK仿真建模、程序下載及調(diào)試監(jiān)控人機(jī)界面;還安裝有牽引控制裝置的監(jiān)控服務(wù)軟件,用于實(shí)現(xiàn)牽引控制裝置的調(diào)試及故障診斷等功能。dSPACE仿真器的具體配置情況如圖6所示。
為了縮短仿真時(shí)間步長,dSPACE仿真器采用雙CPU結(jié)構(gòu),主CPU用于網(wǎng)側(cè)子系統(tǒng)(包括接觸網(wǎng)、牽引變壓器、四象限變流器等)仿真模型的計(jì)算,從CPU用于電機(jī)側(cè)子系統(tǒng)(包括中間直流回路、PWM 逆變器、牽引電機(jī)等)仿真模型的計(jì)算,兩CPU之間傳遞的數(shù)據(jù)僅為直流側(cè)電壓和電流。通過雙CPU結(jié)構(gòu)的使用,仿真器的時(shí)間步長最短可設(shè)置為50 μ s。CPU為DS1006處理器板卡,它采用主頻3.0 GHz的AMD OpteronTM微處理器,計(jì)算功能強(qiáng)大。兩個(gè)DS1006板卡各配置一個(gè)DS911光纖通訊模塊,它們之間通過光纖以1.25 Gb/s的速率進(jìn)行數(shù)據(jù)交換。

圖6 dSPACE仿真器配置示意圖
牽引控制裝置的主要硬件接口信號(hào)由dSPACE實(shí)時(shí)仿真器的IO板卡來模擬,其中控制脈沖信號(hào)PWM由DS5001數(shù)字波形捕獲板卡來模擬,數(shù)字輸入信號(hào)DI與數(shù)字輸出信號(hào)DO由DS4003數(shù)字I/O板卡來模擬,電壓或電流傳感器信號(hào)AO由DS2102 D/A板卡來模擬,速度傳感器信號(hào)Enc由DS5101數(shù)字波形輸出板卡來模擬。IO板卡與DS1006處理器板卡之間通過PHS總線以20 Mb/s的速率進(jìn)行數(shù)據(jù)通訊。牽引控制裝置的其余部分硬件接口信號(hào)由IO模擬操作面板來模擬,它上面配置有模擬溫度或壓力傳感器信號(hào)的電位器、模擬二進(jìn)制輸入信號(hào)的開關(guān)及模擬二進(jìn)制輸出信號(hào)的指示燈。
dSPACE配置有功能強(qiáng)大、界面友好、基于 Windows操作系統(tǒng)的軟件環(huán)境,支持基于MAT LAB/SIMULINK離線仿真軟件的仿真建模,采用RTI實(shí)時(shí)接口軟件實(shí)現(xiàn)SIMULINK仿真模型到仿真器實(shí)時(shí)硬件代碼的自動(dòng)生成和下載,并提供ControlDesk人機(jī)界面軟件方便實(shí)現(xiàn)硬件的圖形化管理、用戶虛擬儀表的建立、變量與參數(shù)的可視化管理等功能。dSPACE仿真器與工控機(jī)之間借助DS814、DS819通訊板卡通過光纖進(jìn)行高速數(shù)據(jù)通訊。
3 實(shí)時(shí)仿真測試結(jié)果
牽引控制裝置上載實(shí)際裝車用版本的軟件,MVB網(wǎng)絡(luò)模擬器按照實(shí)車通訊協(xié)議模擬牽引控制裝置的MVB網(wǎng)絡(luò)環(huán)境。交流傳動(dòng)系統(tǒng)仿真模型采用電動(dòng)車組的實(shí)車相關(guān)參數(shù),經(jīng)過編譯下載到dSPACE硬件仿真器中運(yùn)行,仿真時(shí)間步長設(shè)為50 μ s。仿真過程中,通過ControlDesk軟件進(jìn)行參數(shù)調(diào)整、變量觀測及波形記錄。
3.1 牽引工況仿真結(jié)果
在接觸網(wǎng)壓25 kV、手柄級(jí)位100%、牽引工況條件下,列車速度119 km/h、330 km/h時(shí)的仿真波形分別如圖7、圖8所示。其中圖(a)是四象限變流器1的交流側(cè)電壓、電流波形;圖(b)是PWM 逆變器的U相電壓、U相電流波形。

圖7 車速119 km/h牽引工況時(shí)的仿真波形

圖8 車速330 km/h牽引工況時(shí)的仿真波形
3.2 電制動(dòng)工況仿真結(jié)果
在接觸網(wǎng)壓25 kV、手柄級(jí)位100%、電制動(dòng)工況條件下,列車速度119 km/h、330 km/h時(shí)的仿真波形分別如圖9、圖10所示。其中圖(a)是四象限變流器1的交流側(cè)電壓、電流波形;圖(b)是PWM 逆變器的 U相電壓、U相電流波形。

圖9 車速119 km/h電制動(dòng)工況時(shí)的仿真波形
對(duì)比實(shí)車運(yùn)行試驗(yàn)結(jié)果,圖7~圖10所示的仿真結(jié)果與試驗(yàn)結(jié)果相一致,從而驗(yàn)證了仿真模型的正確性及硬件在回路仿真測試系統(tǒng)的有效性。
4 結(jié)束語
建立了基于MATLAB/SIMULINK軟件的電動(dòng)車組交流傳動(dòng)系統(tǒng)主回路仿真模型,搭建了“實(shí)際牽引控制裝置+dSPACE仿真器”的硬件在回路實(shí)時(shí)仿真測試系統(tǒng)。仿真結(jié)果與實(shí)車運(yùn)行試驗(yàn)結(jié)果相一致,驗(yàn)證了仿真模型及硬件在回路仿真測試系統(tǒng)的有效性。

圖10 車速330 km/h電制動(dòng)工況時(shí)的仿真波形
該仿真測試系統(tǒng)已成功應(yīng)用于電動(dòng)車組交流傳動(dòng)系統(tǒng)的設(shè)計(jì)與驗(yàn)證,為我國高速動(dòng)車組的自主創(chuàng)新提供了良好的技術(shù)支撐。
[1] P.Terwiesch,T.Keller,E.Scheiben.Rail vehicle control system integration testing using digital hardware-in-the-loop simulation[A].IEEE Transactions on Control Systems Technology,1999,7(3):352-362.
[2] 丁榮軍,桂衛(wèi)華,陳高華.電力機(jī)車交流傳動(dòng)系統(tǒng)的半實(shí)物實(shí)時(shí)仿真[J].中國鐵道科學(xué),2008,29(4):96-102.
[3] 盧子廣,柴建云,王祥珩,等.電力驅(qū)動(dòng)系統(tǒng)實(shí)時(shí)控制虛擬實(shí)驗(yàn)平臺(tái)[J].中國電機(jī)工程學(xué)報(bào),2002,23(4):119-123.
[4] 薛定宇,陳陽泉.基于MAT LAB/Simulink的系統(tǒng)仿真技術(shù)與應(yīng)用[M].北京:清華大學(xué)出版社,2002.
[5] 丁榮軍,黃濟(jì)榮.現(xiàn)代變流技術(shù)與電氣傳動(dòng)[M].北京:科學(xué)出版社,2008.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科教新報(bào)(2022年12期)2022-05-23 06:34:16
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
海峽姐妹(2020年8期)2020-08-25 09:30:18
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
人民中國(日文版)(2015年9期)2015-03-20 15:08:12
