自適應變步長占空比擾動法在光伏發電MPPT中的應用
2011-04-20 07:27:32薛陽張佳棟
上海電力大學學報 2011年6期
關鍵詞:系統
薛陽,張佳棟
(上海電力學院電力與自動化工程學院,上海 200090)
光伏最大功率點跟蹤(Maximum Power Pint Tracking,MPPT)技術,是指在溫度、光照等外界條件發生變化時,系統通過控制改變太陽電池陣列的輸出電壓或電流的方法使陣列始終工作在最大功率點上,從而保證光伏陣列始終保持最大功率輸出[1].它是太陽能光伏并網發電中的一項重要的關鍵技術.目前已有多種MPPT控制算法,如恒定電壓法、電導增量法.前者控制簡單但精度不高;后者跟蹤方法簡單,被測參數少但會在最大功率點產生震蕩.智能處理算法(如模糊控制法、神經網絡法)具有較好的動態和穩態性能,但控制復雜較難實現[2-4].
傳統干擾觀察法因其算法簡潔、容易實現,以及與光伏陣列的電氣特性參數無關等特點已得到廣泛應用,但由于擾動步長固定,當步長較大時會使系統在最大功率點附近產生較大的震蕩,造成能量損失,當步長較小時系統搜索時間過慢,效率降低[5].為了得到較高的響應速度和穩態跟蹤精度,本文采用一種自適應變步長占空比干擾觀察法,通過建立仿真模型來證明其具有較好的跟蹤效果.
1 光伏電池的等效模型
光伏電池的等效模型如圖1所示[2-4].
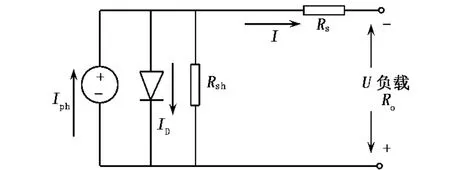
圖1 光伏電池等效模型
光伏電池的輸出特性方程為:
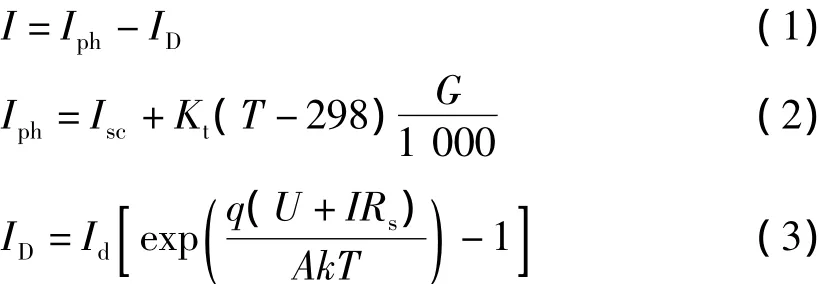
光伏電池模塊是由光伏電池元串并聯而成的,設有m條n個光伏電池元串并聯形成的光伏電池,則此光伏模塊的數學模型為:

2 自適應變步長占空比干擾觀察法的原理分析
2.1 傳統占空比干擾觀察法
傳統占空比干擾觀察法的原理是:控制器在每個控制周期內調節占空比,以一定的步長擾動來改變光伏電池的輸出電壓,擾動方向可以是電壓增大的方向,也可以是電壓(或電流)減小的方向.然后檢測出干擾后的功率,與干擾前所記憶的功率進行比較,如果干擾后的功率大于干擾前的功率,則說明干擾方向正確,沿著該方向繼續干擾;反之,如果干擾后的功率小于干擾前的功率,則說明干擾方向錯誤,將干擾方向變換后繼續干擾,如此循環進行,光伏陣列的實際工作點就可以接近最大功率點,以達到逼近最大功率點的目的[1,2].但由于占空比擾動步長固定,最終系統會在最大功率點附近振蕩,這種振蕩會造成功率損失.
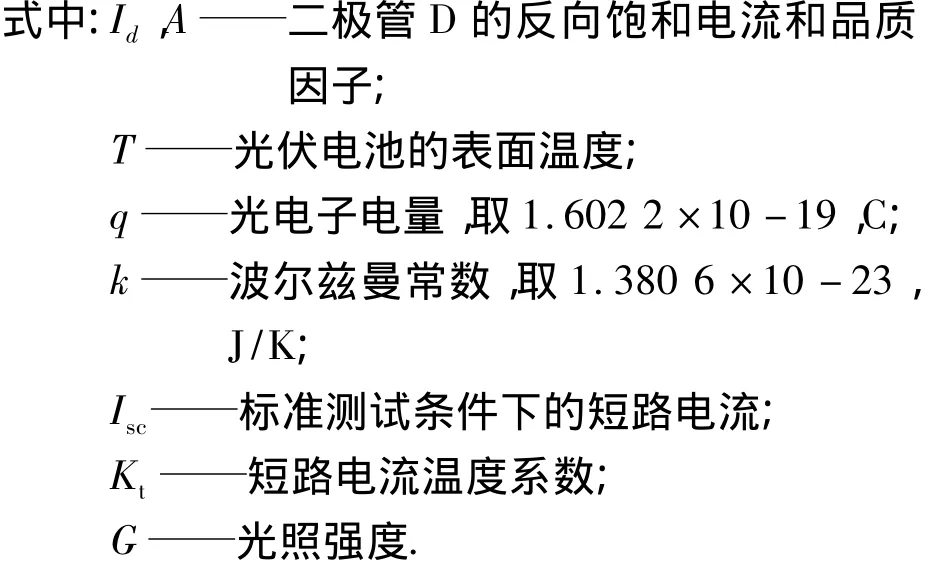
傳統光伏系統最大功率點跟蹤是通過DC/ DC變換電路實現的,通過改變電路的占空比D,使其等效輸入阻抗與光伏輸出阻抗相匹配即內阻等于外阻,以實現光伏電池的最大功率輸出.MPPT等效電阻匹配圖如圖2所示[3].
圖2 MPPT等效電阻匹配示意
DC/DC變換電路以Boost電路為基礎,光伏電池陣列與Boost電路相接時,假設外部負載仍為純電阻負載,在忽略Boost電路本身阻抗的情況下,根據Boost電路的阻抗變換關系,得到Boost電路的等效輸入阻抗為:

式中:D—— Boost電路的開關占空比;
R——電阻性負載的阻抗.
圖3為基于Boost電路的MPPT拓撲結構.
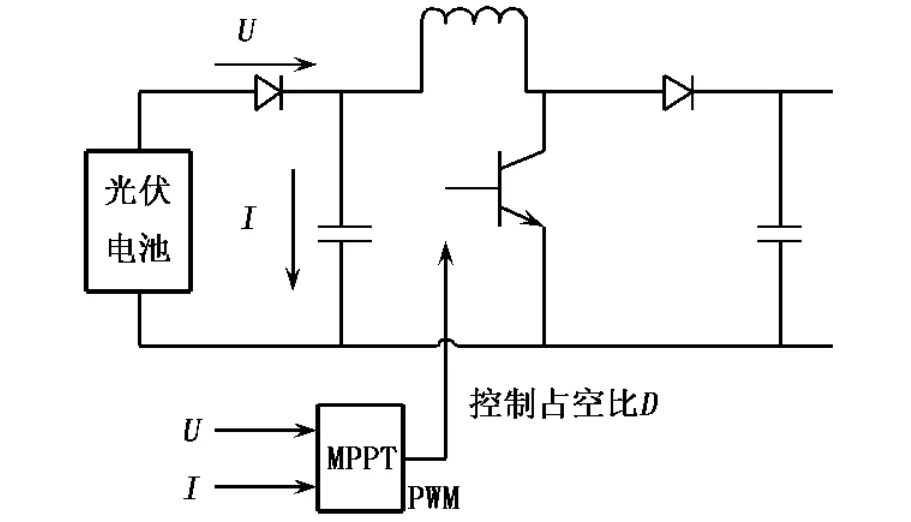
圖3 基于Boost電路的MPPT拓撲結構
圖4為光伏電池的P-U特性曲線,當P-U曲線斜率為零時,系統處于最大功率點.
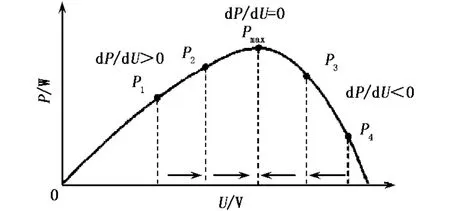
圖4 光伏電池的P-U特性曲線
圖5為光伏電池的P-D關系曲線,通過動占空比D測量輸出功率的變化量,得到功率變化的方向.
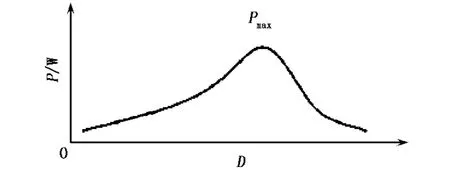
圖5 光伏電池的P-D關系曲線
由圖4和圖5可知,可以采用PWM信號占空比D作為控制擾動.
2.2 自適應變步長原理
為了克服傳統占空比干擾觀察法搜集速度慢、系統在最大功率點發生振蕩現象的缺點,本文采用自適應變步長占空比干擾觀察法,可以使系統穩定工作在最大功率點.改進占空比干擾觀察法的核心思想是自適應變步長,在擾動過程中不斷地改變擾動步長.
由圖4光伏電池的P-U特性曲線可以看出,光伏陣列的d P/d U曲線在最大功率點處的特點是[5-7]:d P/d U>0為最大功率點的左側;d P/d U= 0為最大功率點;d P/d U<0為最大功率點的右側.
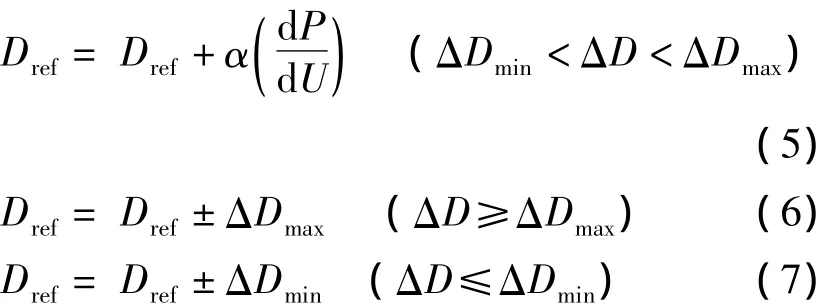
觀察光伏陣列P-U曲線的斜率d P/d U的絕對值變化可以看出,逐漸接近最大功率點,d P/d U的絕對值也單調遞減,當到達最大功率點時,d P/ d U的絕對值為零.根據光伏陣列的這一特性,可以自適應地調整占空比的步長.占空比擾動ΔD =α(d P/d U)(α為正數,即變步長速度因子,用于調整跟蹤速度),占空比擾動步長隨著d P/d U的變化而變化,當光伏陣列運行點遠離最大功率點時,擾動步長增大,反之則減小,直至接近最大功率點時趨近于零.由于ΔD擾動步長有規定的上限,所以當α(d P/d U)≥ΔDmax時,ΔD=ΔDmax.當α(d P/d U)≤ΔDmin時,ΔD=ΔDmin.
占空比擾動表達式為:
3 自適應變步長占空比干擾觀察法的仿真研究
3.1 仿真模型建模
基于自適應占空比擾動觀察法原理,運用SFunction編程建立能和Simulink模塊庫中模塊串并聯用的功能模塊mppt-control,并與固定頻率的三角波發生器組成MPPT-PWM模塊.將光伏電池通過Boost電路與MPPT-PWM模塊相連,得到如圖6所示的光伏發電系統仿真控制模型.
MPPT系統的采樣時間t=0.01,變步長速度因子α=0.05,以自適應變步干擾觀察法的原理和式(5),式(6),式(7)進行S-Function編程.該仿真控制模型中L為3 mH,C為500μF,R為15 Ω[8-10].Repeating Sequemce模塊中的三角波的載波頻率設置為10 kHz.
3.2 仿真結果分析
本光伏電池模塊采用ASTRONERGY型號為CHSM5408M的電池模板,當太陽能光伏方陣輸入日照G取1 000W/m2,電池溫度t為25℃時,具體參數數值為Isc=5.45 A,開路電壓Uoc= 22.2 V,最大功率點電流Im=4.65 A,最大功率點電壓Um=18.1 V,在此數據環境下進行仿真.
采用固定占空比干擾觀察法的光伏電池輸出功率、輸出電壓、輸出電流仿真曲線如圖7所示,此時的固定占空比擾動ΔD=0.02.
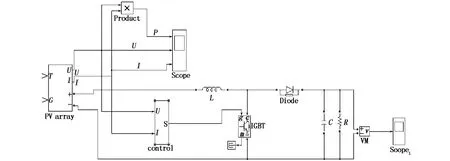
圖6 光伏發電系統的仿真控制模型
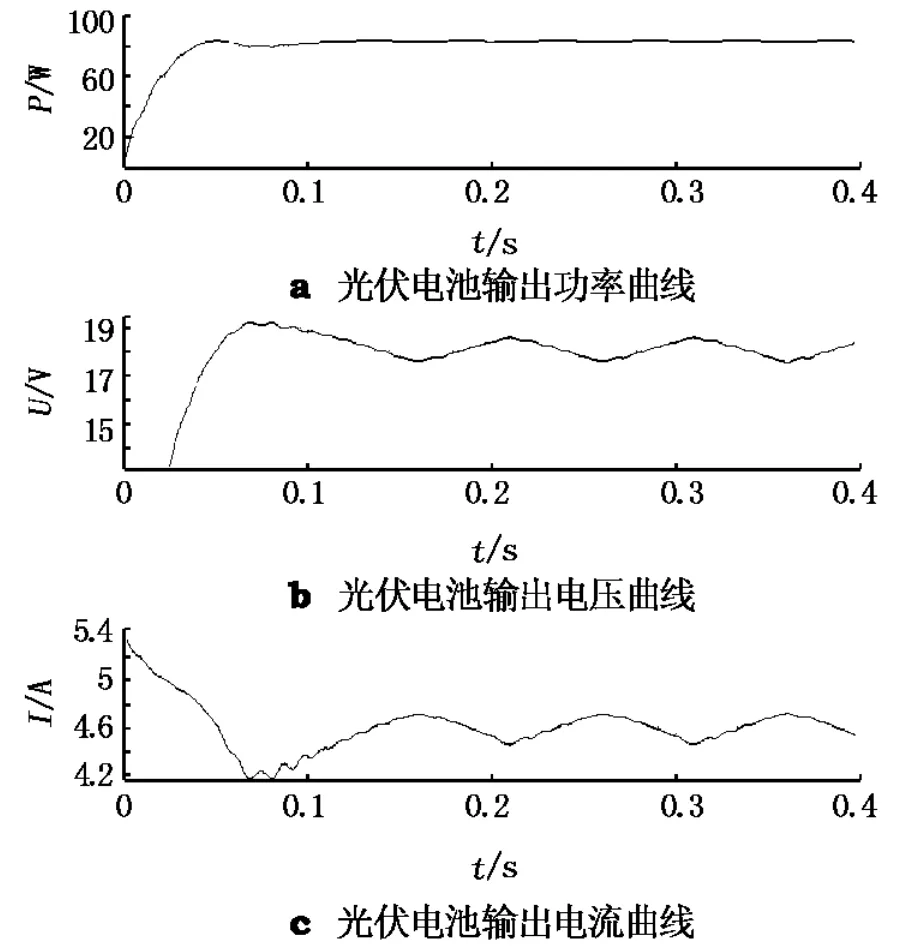
圖7 采取固定占空比干擾觀察法的光伏電池輸出功率、輸出電壓、輸出電流仿真曲線
采用自適應變步長占空比擾動觀察法的光伏電池輸出功率、輸出電壓、輸出電流仿真曲線如圖8所示.此時占空比ΔD=α(d P/d U),ΔDmax= 0.05,ΔDmin=0.01.
由圖7和圖8可以看出,兩種方法都能實現最大功率點跟蹤,最終的輸出電壓和輸出電流都趨向于理想最大功率點電壓Um=18.1 V,電流Im=4.65 A.圖7顯示系統在0.12 s左右實現最大功率點跟蹤后出現震蕩,輸出電壓在18 V附近震蕩,振幅在1 V以內;輸出電流在4.6 A附近震蕩,振幅在0.2 A以內.
圖8顯示系統在0.08 s左右輸出電壓穩定在18 V,輸出電流穩定在4.6 A,在最大功率點附近的振幅趨向于零.
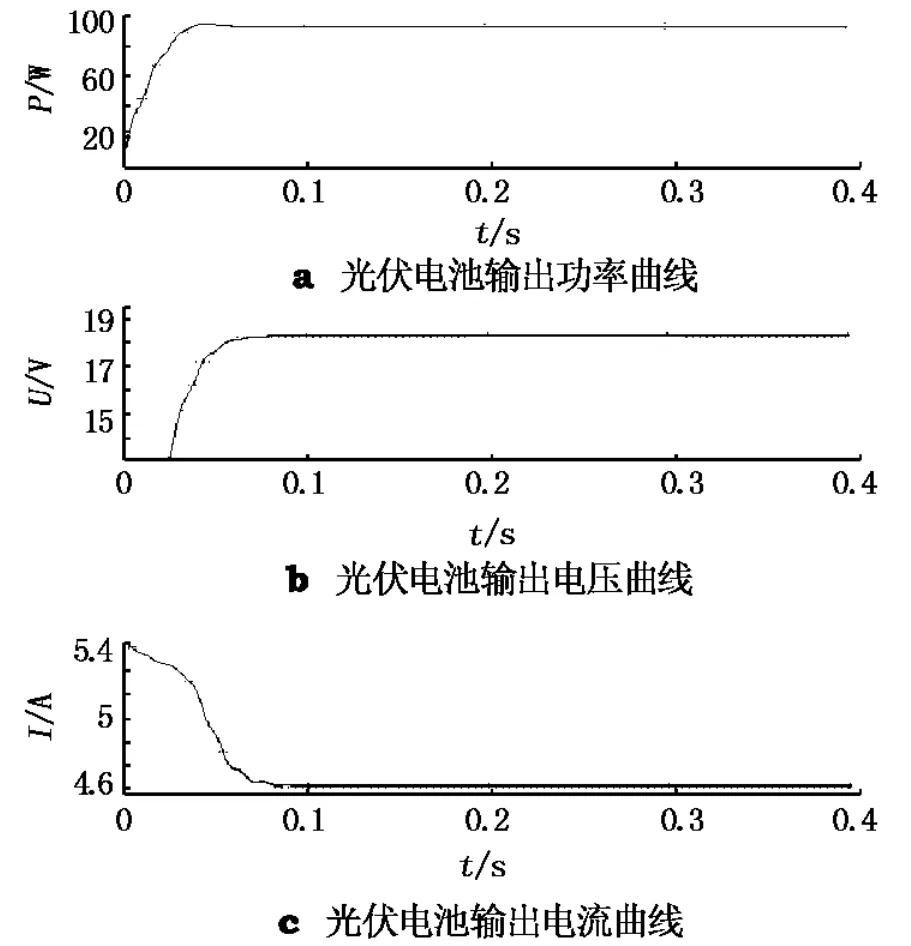
圖8 采取自適應變步長占空比擾動觀察法的光伏電池輸出功率、輸出電壓、輸出電流仿真曲線
通過圖7和圖8比較可知,自適應變步長占空比擾動觀察法較傳統的占空比擾動觀察法具有更快的搜索速度和更穩定的搜索精度,能有效克服傳統占空比觀察法在最大功率點處發生震蕩所帶來的能量損失,提高了光伏發電效率.
4 結語
傳統占空比干擾觀察法在系統跟蹤速度和響應穩態跟蹤精度方面存在不足,本文采用自適應變步長占空比干擾觀察法,其擾動步長不斷變化,具有較強的自適應性,能夠隨時調整到相應的最優擾動步長,可以使系統的最大功率跟蹤效率得到較大提升.
[1]周林,武劍,栗秋華,等.光伏陣列最大功率點跟蹤控制方法綜述[J].高電壓技術,2008,34(6):1 145-1 154.
[2]劉邦銀,段善旭,康永.部分陰影條件下光伏模組特性的建模與分析[J].太陽能學報,2008,29(2):188-192.
[3]栗秋華,周林,劉強,等.光伏并網發電系統最大功率跟蹤新算法及其仿真[J].電力自動化設備,2008,28(7):21-25.
[4]李煒,朱新堅.光伏系統最大功率點跟蹤控制仿真模型[J].計算機仿真,2006,23(6):239-243.
[5]肖俊明,王東云,李燕斌,等.基于遺傳算法的占空比擾動法在MPPT中的應用研究[J].電力系統保護與控制,2010,38(15):51-55.
[6]劉邦銀,段善旭,劉飛,等.基于改進擾動觀察法的光伏陣列最大功率點跟蹤[J].電工技術學報,2009,24(6):91-94.
[7]ZHANG Chao,ZHAO An,WANG Jin-jing.A modified MPPT method with variable perturbation step for photovoltaic system[C]//Power Electronics and Motion Control Conference,2009:2 199-2 201.
[8]HAMROUNIN,JRAIDIM,CHERIF A,et al.Measurements and simulation of a PV pumping systems parameters using MPPT and PWM control strategies[C]//Electro Technical Conference,2006:885-888.
[9]吳理博,趙爭鳴,劉建政.單級式光伏并網逆變系統中的最大功率點跟蹤算法穩定性研究[J].中國電機工程學報,2006,26(6):73-77.
[10]ARMSGONG S,HURLEY W G.Self-regulating maximum powerpoint tracking for solar energy systems[C]//39th International Universities Power Engineering Conference,2004:73-77.
(編輯胡小萍)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
