汽車防撞毫米波雷達系統參數優化設計
2011-03-21 15:46:10周剛,吳杰
電訊技術 2011年7期
周 剛,吳 杰
(河南工業大學電氣工程學院,鄭州 450007)
1 引 言
調頻連續波(FMCW)雷達具有很高的距離分辨率,采用一定的調制方式可以同時進行距離和速度的測量。隨著高頻器件和單片微波集成電路(MMIC)的出現和應用,調頻連續波(FMCW)雷達的性能有了很大的提高,成本不斷下降;其外形尺寸可以做得很小,適合在汽車上安裝,是目前汽車防撞雷達研究的主要方向[1]。
德國無線電通信研究所研制了一種用于裝備標準大眾Passat小汽車的調頻連續波防撞雷達。該系統主要參數最大作用距離為150 m,距離分辨率為1 m,相對速度分辨率為2.5km/h。英國研制的汽車防撞雷達的主要參數如下:工作頻率為 76~77GHz,體制FMCW,作用距離為100 m,距離精度為0.5 m,相對速度為160km/h,速度精度為1.5km/h,掃描速率為20 Hz[1]。以上防撞雷達具有較高的分辨率,但硬件成本高。本文擬研究防撞雷達工作參數與測量要求間的關系,改進信號處理算法,進而進行工作參數優化設計,降低系統硬件成本。
2 雷達系統工作原理
圖1所示的線性調頻連續波(LFMCW)對稱三角波調制體制雷達可實現對運動目標距離和速度的測量,圖中T為發射信號調頻周期,f0為發射信號中心頻率,B為發射信號調頻帶寬,fT為發射信號頻率,fR為靜止目標回波信號頻率,fRD為運動目標回波信號頻率。

圖1 線性調頻連續波信號頻率Fig.1 FMCW signal frequency

式中,C為光速。
3 雷達前端參數制定
3.1 汽車防撞測量指標
基于前車勻速行駛狀態下的安全距離和相對速度關系如式(2)所示[2]:

式中,R為安全距離(m),vr為兩車相對速度(m/s),td為制動遲滯時間(取1.5 s), 為附著系數(取0.65)[3],g為重力加速度(取 9.8 m/s2)。基于式(2)的計算結果如表1所示(高速公路車輛速度要求低于120km/h,即33.33 m/s)。
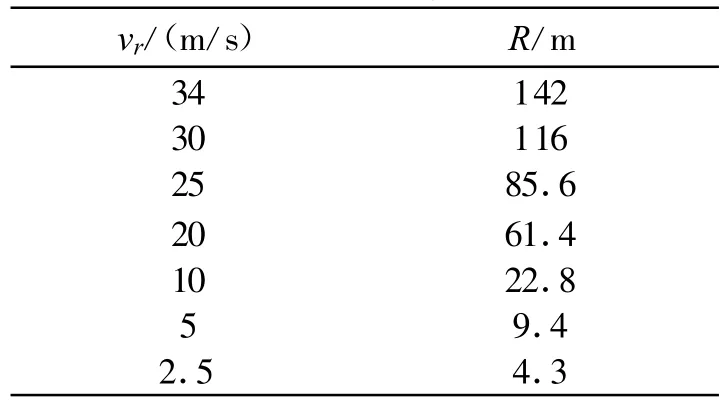
表1 相對速度和安全距離Table 1 Relative velocity and distance

文獻[1]表明汽車防撞測量中距離分辨率通常在0.2~1 m之間,速度分辨率在1~2.5km/h之間,所以制定距離分辨率為ΔR=0.5 m,速度分辨率Δv=1.8km/h(0.5 m/s)。
3.2 工作參數制定
汽車防撞雷達要求尺寸較小,為了用小尺寸天線獲得足夠窄的波束,雷達前端應采用盡量高的工作頻率 f0,普遍采用的毫米波頻率有24GHz、35GHz、77GHz、90GHz等[1]。由于多普勒頻率 fd與工作頻率f0成正比,fd與fb存在耦合關系,選取f0時需考慮fd的范圍以及速度分辨率Δ v對應的頻域頻率fdΔ。常用頻率f0對應的fd范圍如表2所示。
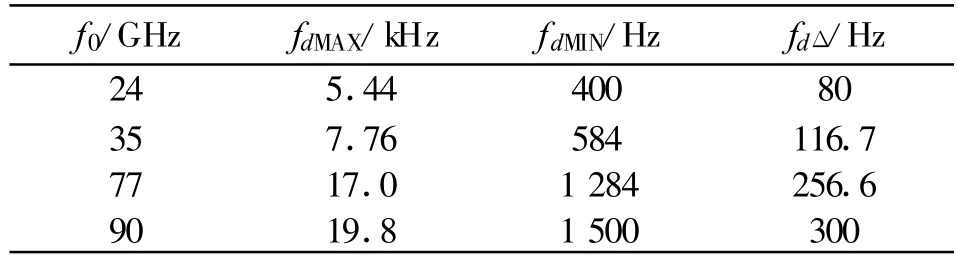
表2 fd與常用中心頻率f0數值關系Table 2 Relation between fdand f0

由于fd與fb的耦合關系,而fb與fM直接相關,在選定工作頻率 f0時需考慮調制頻率 fM。表3給出了fb與備選的fM間的數值關系(距離分辨率ΔR對應頻域頻率為fbΔ)。

表3 fb與調頻頻率fM的關系Table 3 Relation between fband fM
由于fd與速度vr成正比,fb與距離R成正比,距離測量動態范圍大于速度測量動態范圍,理論上只要滿足fbMIN>fdMIN,在f0和fM確定的情況下,隨著距離和速度的增加,fb不會被fd淹沒。實際應用中,考慮低速較近距離時對突然闖入物的有效預警,取 fbMIN≥3fdMIN。
基于以上討論,參考表2和表3數據,選定雷達前端中心頻率f0=24GHz,調頻頻率fM=40 Hz,調頻周期 T=0.025 s。
4 信號處理參數設置
由以上工作參數確定的多普勒頻率 fd的范圍為(0.4kHz,5.44kHz),距離產生的差拍信號中心頻率fb范圍為(1.6kHz,48kHz),對應的差拍信號最高頻率 fbmax=53.44kHz。考慮到實際系統的非理想特性,工程應用一般選取采樣頻率為信號最高頻率的3~5倍,所以選定采樣頻率為200kHz。
4.1 信號處理技術指標
進行時頻分析時,要求距離分辨率ΔR和速度分辨率Δ v在頻域可分辨。采樣率一定情況下,采用FFT進行頻譜分析時,FFT的長度決定了頻率分辨率,從而決定了測量分辨率。FFT點數NFFT的選取需考慮測量范圍和分辨率要求。在滿足分辨率要求下,考慮系統實時性要求,希望NFFT適當小些,而且是2或4的整數次冪。
相對速度的分辨率取決于多普勒頻率的測量。由表2可知速度分辨率Δv對應的多普勒頻率fdΔ=80 Hz,如果 fdΔ<ΔF,則在對正負調頻期間差拍信號進行頻譜分析求取 f1和 f2時,fdΔ將無法分辨,這樣造成距離速度模糊:一方面得不到準確的多普勒頻率值,速度測量誤差大或者無法測速;另一方面將造成距離速度耦合使測距誤差加大,所以要得到目標不模糊速度信息,就要求FFT頻譜分析時多普勒頻率 fdΔ在頻域可分辨,頻率分辨率 ΔF 基于以上討論,要求ΔF=fs/N<80 Hz,若采用直接 FFT方法進行頻譜分析,則FFT點數N≥2500,即 N ≥4096。 正負調頻期間有效采樣時間小于0.0125 s(T/2),采樣數據個數N<2500<4096,盡管通過補零或插值方法可以實現4096點FFT,但4096點的FFT運算量很大,要保證系統的實時性,硬件成本高,而較少點數的FFT不能滿足頻率分辨率要求。線性調頻Z變換(CZT)是提高頻率分辨率的頻譜細化方法之一[5,6]。 Chrip-Z變換是由傅里葉變換導出的一種頻譜分析方法,等價于離散時間傅里葉變換在部分頻帶上的頻譜等間隔取樣,可對信號帶寬中的部分頻帶進行高分辨率的頻譜細化分析。采用FFT和CZT聯合算法進行頻譜分析在同等分辨率下可明顯降低運算量。首先通過較少點數的FFT進行差拍信號粗略頻譜估計,然后再利用CZT方法對該位置附近的頻譜局部細化。M點x(n)的Chrip Z變換為 式中,k=0,1,2,… ,M-1;A=A0ejθ0,W=W0e-jφ0 。 CZT算法關鍵是確定分析頻段的起始點及采樣間隔,即 θ0和 φ0。通過 N點的FFT得到頻譜譜峰位置為Kmax(Kmax 細化后頻域采樣間隔ΔF=2fs/MN,達到MN/2點FFT的分辨率,所以要求N·M≥8192,則聯合算法頻率分辨率ΔF≤48.8 Hz<80 Hz。 相同頻率分辨率下,對于N·M點FFT,若直接采用FFT的方法,其運算量為0.5(N·M)lb(N·M);若采用聯合FFT和CZT算法,則聯合算法的總運算量為0.5N lb N+1.5(N+M)lb(N+M)[5]。 汽車防撞系統是低速較近距離的測量,速度分辨率和距離分辨率要求較高,對應較高的頻率分辨率(頻率間隔較小)。防撞系統掃描周期短,信號處理中,若采用直接FFT方法,其運算量很大,很難保證系統實時性要求;或者增加系統硬件配置以提高處理速度,這無疑提高了硬件成本。而相同的分辨率,聯合算法的運算量遠小于直接FFT的運算量,滿足系統實時性要求。所以相同運算量,采用聯合算法可大幅度提高系統的頻率分辨率。 影響FFT點數與CZT點數選取的主要因素是有效采樣期間采樣點數和噪聲。FFT點數太低,采樣數據錯誤的偶然性增加,可能影響頻譜范圍選擇的正確性,進而影響測頻正確性[6]。FFT法受噪聲影響較小,其頻率估計誤差比無噪聲情況下略大一點,而FFT-CZT法的頻率估計誤差受噪聲影響較大,所以聯合算法更適用于高信噪比的信號[1]。在滿足系統實時要求前提下選擇大點數FFT和小點數CZT進行頻譜分析。 取N=256,M=40,則聯合算法頻域分辨率ΔF=39.1 Hz<80 Hz,聯合算法所需時間約為直接FFT的1/16,能夠滿足實時性和分辨率要求。 LFMCW雷達應用于汽車防撞,針對系統間各個參數相互影響,在進行系統設計時應全面考慮各個參數間的制約關系。本文重點討論了與時域分辨率和頻域分辨率相關的參數,根據信號處理過程制定了具體的工作參數。本文研究的參數設計方法已應用于汽車防撞雷達系統設計中,其方法過程也可作為LFMCW雷達其它應用領域或者信號處理的參考。本文的研究考慮路況較簡單,對復雜路況、多目標背景下,需進一步研究虛警產生和工作參數間的關系,以及中頻信號噪聲產生的原因,研究通過設置合適的工作參數最大程度剔除虛警等問題。 [1] 鄭興林.毫米波汽車防撞雷達信號處理關鍵技術研究[D].長沙:國防科學技術大學,2007.ZHENG Xing-lin.Research on Key Technique of Automobile Anti-collision Millimeter Wave Radar signal Processing[D].Changsha:National University of Defense Technology,2007.(in Chinese) [2] 唐陽山,江振偉,白艷,等.汽車防碰撞安全距離模型及仿真研究[J].遼寧工業大學學報(自然科學版),2008,38(5):324-326.T ANG Yang-shan,JIANG Zhen-wei,BAI Yan,et al.Model of Vehicle Safety Distance for Collision Avoidance and Simulation Study[J].Journal of Liaoning University of Technology(Natural Science Edition),2008,38(5):324-326.(in Chinese) [3] 楊翠萍,官慧峰.高速公路汽車防撞系統的安全行車距離研究[J].自動化儀表,2008,29(9):19-21.YANG Cui-ping,GUAN Hui-feng.Research on Safe Distance between Vehicles for Freeway Anti-collision System[J].Process Automation Instrumentation,2008,29(9):19-21.(in Chinese) [4] 梁品,陳照章,于敬泉.基于DSP的汽車防撞雷達及其信號處理[J].微電子學,2007,37(5):628-631.LIANG Pin,CHEN Zhao-zhang,YU Jing-quan.Design of Anti-collision Radar for Automobiles Based on DSP and Its Signal Processing[J].Microelectronics,2007,37(5):628-631.(in Chinese) [5] 肖慧,胡衛東,郁文賢.基于DPT-CZT處理的LFMCW雷達參數估計[J].現代雷達,2008,30(11):48-50.XIAO Hui,HU Wei-dong,YU Wen-xian.parameter Estimation Based on DPT-CZT Processing in LFMCW Radar[J].Modern Radar,2008,30(11):48-50.(in Chinese) [6] 齊國清.幾種基于FFT的頻率估計方法精度分析[J].振動工程學報,2006,19(1):86-89.QI Guo-qing.Accuracy analysis and comparison of some FFT-based frequency estimation[J].Journal of Vibration Engineering,2006,19(1):86-92.(in Chinese)4.2 技術參數的優化實現


5 結束語