采用 SMA驅動的小型空間磁懸浮飛輪鎖緊機構
2011-03-16 09:20:38閆曉軍張小勇聶景旭
北京航空航天大學學報 2011年2期
關鍵詞:設計
閆曉軍 張小勇 聶景旭
(北京航空航天大學 能源與動力工程學院,北京 100191)
張紹衛
(北京控制工程研究所,北京 100094)
采用 SMA驅動的小型空間磁懸浮飛輪鎖緊機構
閆曉軍 張小勇 聶景旭
(北京航空航天大學 能源與動力工程學院,北京 100191)
張紹衛
(北京控制工程研究所,北京 100094)
磁懸浮飛輪鎖緊機構在衛星發射時鎖緊飛輪,減小其振動和沖擊載荷;在發射后解鎖,保證飛輪正常工作.目前已有的以火工品或步進電機驅動的鎖緊機構具有沖擊大、體積較大、不可重復使用等缺點.提出了一種采用形狀記憶合金(SMA,Shape Memory Alloy)驅動的空間磁懸浮飛輪鎖緊機構的設計方案,并在 Liang本構模型的基礎上發展了機構驅動單元的設計方法.之后,完成了鎖緊機構的樣機研制和調試,并開展了地面的性能測試、振動試驗和高溫環境試驗.研究結果表明:SMA鎖緊機構安裝體積小,在星載 28V電壓下能在 6s內完全鎖緊,在 1s內完全解鎖,并能夠通過振動和環境實驗.SMA驅動的磁懸浮飛輪鎖緊機構具有鎖緊力大、同步性好、可重復使用、低沖擊、無污染等優勢,有很大的工程應用潛力.
形狀記憶合金;磁懸浮飛輪;空間鎖緊機構;本構模型;設計方法
目前,磁懸浮飛輪以其優越的控制精度和高可靠性從衛星姿態控制機構中脫穎而出[1-2].由于自由懸浮的需要,磁懸浮飛輪的靜子和轉子之間存在縫隙.因此就需要鎖緊機構在發射時消除間隙、頂緊轉子,減小磁懸浮飛輪在發射環境下的所受的振動和沖擊載荷;在發射后通過指令解鎖,使磁懸浮飛輪能正常工作.通常情況下,磁懸浮飛輪在真空環境里工作,因此,要求鎖緊機構在工作狀態變換時不能產生多余物;此外,磁懸浮飛輪一般多在小型衛星上使用,用于安裝鎖緊機構的空間比較狹小,要求機構的體積不能過大;如果為了減小單個鎖緊機構的載荷而采用多個鎖緊機構,則要求鎖緊機構有很好的同步性(同步性是指 2個機構解鎖時間或者鎖緊時間的差值,時間差越大,說明同步性越差,反之則越好).可見,為了保障磁懸浮飛輪可靠工作,其配套的鎖緊機構必須能夠承受高負荷,并且具有可重復作動、體積小、作動時間短等特點.目前,國內外鎖緊機構的驅動源主要用 2種,一種為火工品,另一種為電機,這也是目前航天機構中使用最多的 2種驅動源.
火工品驅動的鎖緊機構以德國發展的利用火工品充氣裝置驅動波紋管[3]來實現鎖緊的鎖緊機構最有代表,該機構由充氣系統和作動系統組成,通過充氣系統對作動系統進行驅動,實現鎖緊功能.由于需要火工品充氣系統進行驅動,使得該機構在作動時不可避免的會產生沖擊、生成污染性氣體,而且只能一次作動;另外,當衛星和磁懸浮飛輪進一步小型化時,此類鎖緊機構由于安裝體積較大,限制了它的進一步使用.電機驅動以國內同濟大學提出的磁懸浮飛輪自動鎖緊系統[4]最有代表,該方案主要采用步進電機驅動螺桿-螺母結構來完成空間鎖緊功能,該方案結構比較簡單,可靠性高,但電機的扭矩較小,不能直接提供足夠的鎖緊力,需要變速系統減速以增加扭矩,使得體積相對增大,鎖緊時間增長.無論是火工品驅動的充氣方案還是電機驅動方案,當磁懸浮飛輪進一步小型化時(小型磁懸浮飛輪直徑為 100mm左右),這 2類鎖緊機構相對較大的體積將會嚴重制約其應用.
形狀記憶合金(SMA,Shape Memory Alloy)是最近幾十年內發展起來的新型智能材料,與一般金屬材料相比,具有許多獨特的力學和物理性能,其中最重要的就是形狀記憶特性(SME,Shape Memory Effect)和超彈性性能[5].本文提出利用 SMA的記憶特性來設計一種新型的空間磁懸浮飛輪鎖緊機構(以下簡稱 SMA鎖緊機構).SMA的“形狀記憶特性”是指:材料被拉伸變形,卸載后其變形不能完全回復留有殘余變形,但是只要對其加熱到某一溫度之上,則變形消失,回復到原來的形狀.當有約束阻止其回復時,SMA就會產生很大的回復力,以 NiTi合金為例,當其預變形量達到 8%時,對其加熱,它最大能產生約600MPa的回復應力[6].此外,SMA絲的電阻很大,可以直接給其通電來加溫,所需的電流和電壓條件和目前航天器上的供電條件能夠兼容,使得其特別適合在航天器機構設計中使用.
1 結構設計
1.1 設計目標
典型的磁懸浮飛輪結構如圖 1所示,轉子 2通過軸承 3安裝在定子 4上,而定子 4連接在基座 1上,軸承和轉子之間存在一個很小的間隙(此次研究中的間隙為 0.2mm).利用形狀記憶合金設計鎖緊機構,存在以下幾個難點:
1)在發射過程中,飛輪可能在 3個方向(x,y,z)振動載荷都很大,可能達到幾十個重力加速度,因此,要求鎖緊機構能夠在消除間隙的同時,能夠在 3個方向上提供支撐力,以克服來自各個方向上的大載荷.
2)完成飛輪的鎖緊和解鎖,需要 SMA作動,而 SMA的作動距離和本身的總長度相關(一般最大為總長度的 6%~7%左右).為了確保飛輪在解鎖狀態旋轉可靠,要求完成鎖定和解鎖需要的作動行程較大,即:SMA絲有較長的安裝空間,但實際的安裝空間狹小,需要采取特殊的 SMA“繞線”方式和結構設計措施.
3)當載荷較大,需要采用多個機構同時完成鎖緊工作時,要保證多個機構工作的同步性.
4)SMA鎖緊機構盡可能只安裝在飛輪和基座(如圖 1所示)之間的狹小空間中.
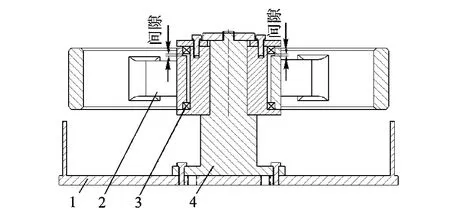
圖1 磁懸浮飛輪結構示意圖
1.2 方案設計
為達到設計目標,本文提出了圖 2所示的SMA鎖緊機構方案,機構工作時的解鎖功能和鎖緊功能分別由解鎖驅動單元和鎖緊驅動單元交替工作來完成.為了減小每個 SMA鎖緊機構的載荷,采用 4個機構均布在飛輪下面的設計方案,如圖 3所示,共同實現飛輪的鎖緊和解鎖.
解鎖驅動單元由楔塊 4,彈簧 3,SMA絲 2,構成,鎖緊驅動單元由楔塊 5,彈簧 6,SMA絲 8構成.SMA鎖緊機構的工作原理為:圖 2是解鎖狀態,圖 4是鎖緊狀態,當鎖緊指令發出后,對 SMA絲 8通電,SMA絲 8收縮,將楔塊 5拔出,同時壓縮彈簧 6,這時楔塊 4在預壓縮的彈簧 3作用下,向右運動,將 SMA絲 2拉伸,同時將彈性爪 9頂起,完成對飛輪的鎖緊.當解鎖指令發出后,對SMA絲 2通電,SMA絲 2收縮,將彈簧 3重新壓縮,同時將楔塊 4拉回,彈性爪 9隨之下落,解除對飛輪的鎖緊.當楔塊 4運動到特定的位置時,楔塊在彈簧的作用下掉入楔塊的槽中,將楔塊鎖住,完成機構的一個完整的工作過程.
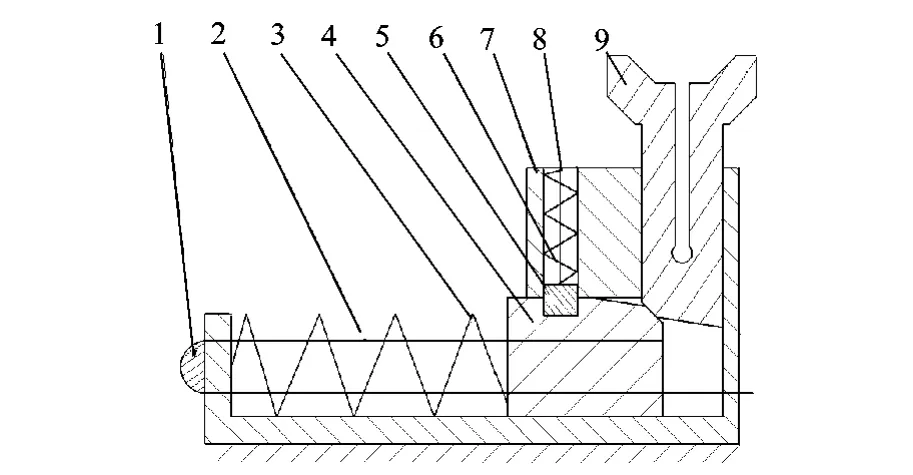
圖2 SMA鎖緊機構工作原理示意圖
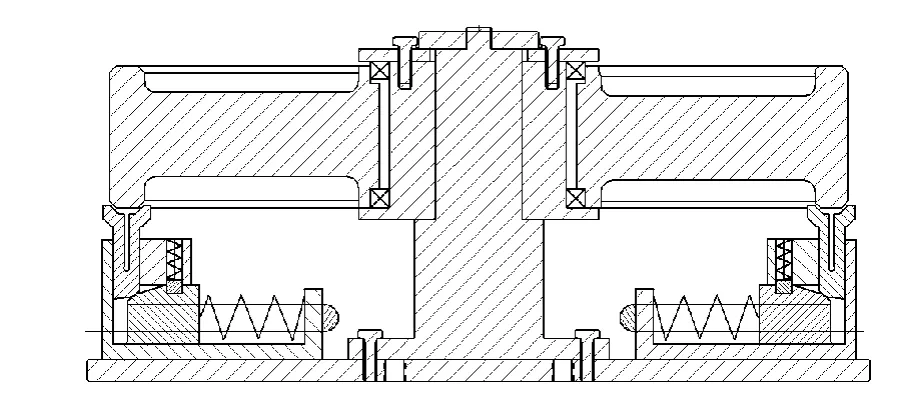
圖3 SMA鎖緊機構分布圖
在機構設計中,還采取了多處新穎的結構設計.根據上面的技術難點,歸納如下:
針對 SMA鎖緊機構要同時承受來自 x,y,z 3個方向的振動載荷的技術難點,本文設計了彈性爪進行支撐,如圖 2中 9所示.彈性爪中間開槽,在支撐時可以通過自身形變的自適應調節,使得兩爪都很好的對輪緣進行支撐.將 SMA鎖緊機構按照如圖 3所示的分布,安裝 4個 SMA鎖緊機構后就可以提供x,y,z3個方向的支撐力.為了保證彈性爪支撐不發生松動,本文將彈性爪楔角 β控制在自鎖角范圍內,如圖 4所示.
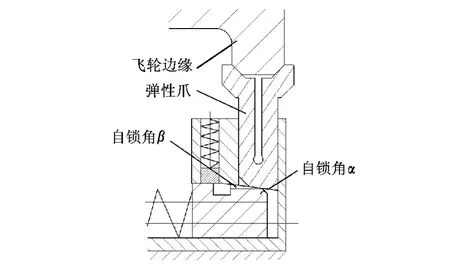
圖4 鎖緊狀態圖
針對過長的 SMA絲在狹小的空間中安裝的問題,本文通過采用“分段斜面”和特殊的 SMA絲繞線方案來解決.“分段斜面”是指將彈性爪和楔塊的接觸面設計成 2個斜率不同的斜面,如圖4所示,大角度斜面用于消除彈性爪和輪緣之間的空程,小斜面用于實現自鎖.大角度斜面的設計可以有效減小了 SMA絲的作動距離,從而減小SMA絲的安裝長度,減小鎖緊機構的體積.另一方面在結構設計中采用了絕緣滑輪來繞 SMA絲(見圖 2),也使其安裝空間縮小了近一半.
針對多個 SMA鎖緊機構的同步性問題,通過在解鎖和鎖緊驅動單元選用不同絲徑的 SMA絲來解決.解鎖驅動單元選用了電阻較大、加熱效率較高的小絲徑 SMA絲,從而保證了較短的作動時間,提高了鎖緊同步性.
從上面 SMA機構的工作原理和關鍵的結構設計方案可以看出,SMA絲和彈簧(驅動單元)的設計將直接關系到機構鎖緊和解鎖功能的實現,更重要的是驅動單元的輸出位移、輸出負載直接影響了 SMA鎖緊機構的鎖緊性能,因此驅動單元的性能直接關系到鎖緊機構的功能,其設計非常重要.
2 驅動單元設計
2.1 設計原理與方法
圖2中,機構解鎖單元由 SMA和彈簧組成,楔塊的運動主要取決于 SMA與彈簧之間的力關系:低溫下彈簧力大于 SMA絲的低溫屈服力,將SMA拉伸,楔塊右移;當溫度上升時,SMA絲收縮,絲的回復力大于彈簧力,楔塊左移.若溫度下降,工作塊再次右移,恢復到初始狀態,從而實現“SMA-彈簧”驅動單元的雙程作動,其模型可簡化如圖 5所示.驅動單元在作動過程中,彈簧的安裝載荷由 SMA絲低溫屈服力決定,而彈簧的工作載荷由 SMA絲的高溫回復力決定,但 SMA絲的高溫回復力與彈簧剛度有關,也就與彈簧的安裝載荷和工作載荷之差有關,因此整個設計過程應該是一個 SMA絲回復力和彈簧輸出力相互匹配的過程.本文在 Liang本構模型[7]和壓縮彈簧設計原理的基礎上[8],發展了一種 SMA-彈簧驅動元件的設計方法和流程,該方法可以根據已知的作動距離、負載、SMA絲的力學參數,在要求的幾何空間內設計出滿足要求的壓縮彈簧和與之相配的SMA絲徑和絲長,方法的流程如圖 6所示.
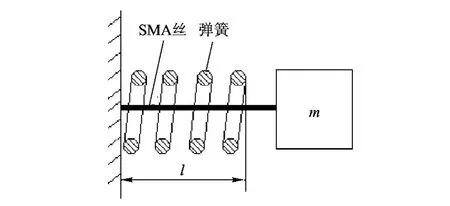
圖5 驅動器簡化模型
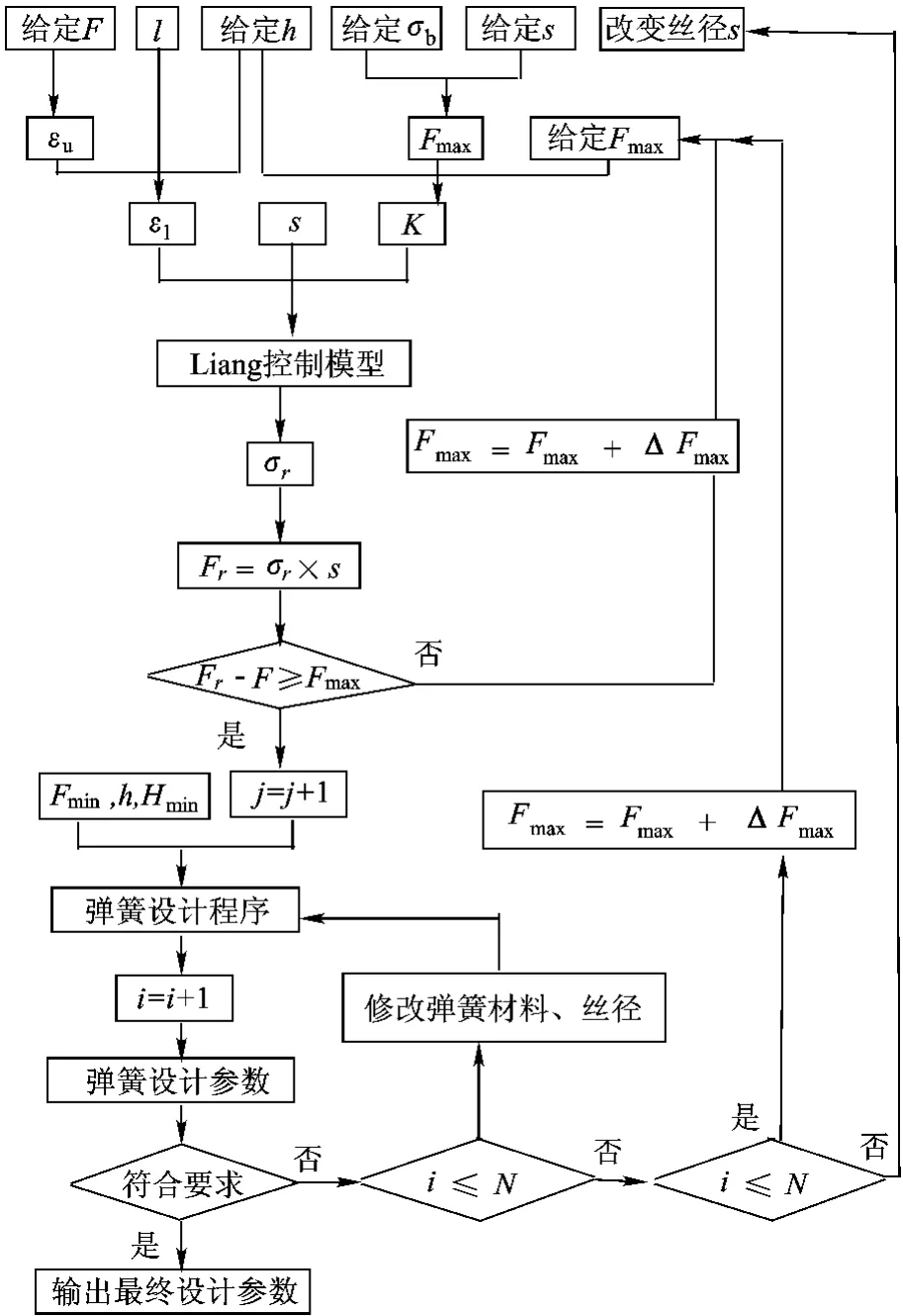
圖6 設計方法流程圖
2.2 Liang本構關系
驅動單元設計過程中,需要用到本構模型對SMA絲的回復應力進行預測,從而完成 SMA絲回復力和彈簧輸出力的相互匹配.由于 Liang本構模型簡單明了且計算結果相對較準確,本文選用 Liang本構模型對 SMA絲回復應力進行預測.圖 5所示邊界條件下的 Liang本構模型通常叫做控制回復模型,如式(1)所示.
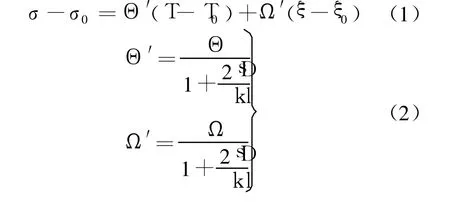
式中,σ為應力;σ0為初始應力值;T為溫度;T0為初始溫度;ξ為馬氏體含量;ξ0為初始馬氏體含量;Θ為熱彈性系數;Ω為相變系數;k為彈簧剛度;s為 SMA絲橫截面積;l為 SMA絲原始長度.由式(2)可以看出,SMA絲的高溫回復應力與彈簧剛度 k有關,進一步驗證了 2.1中提出的設計方法.
SMA在升溫過程中應力與溫度關系表示為
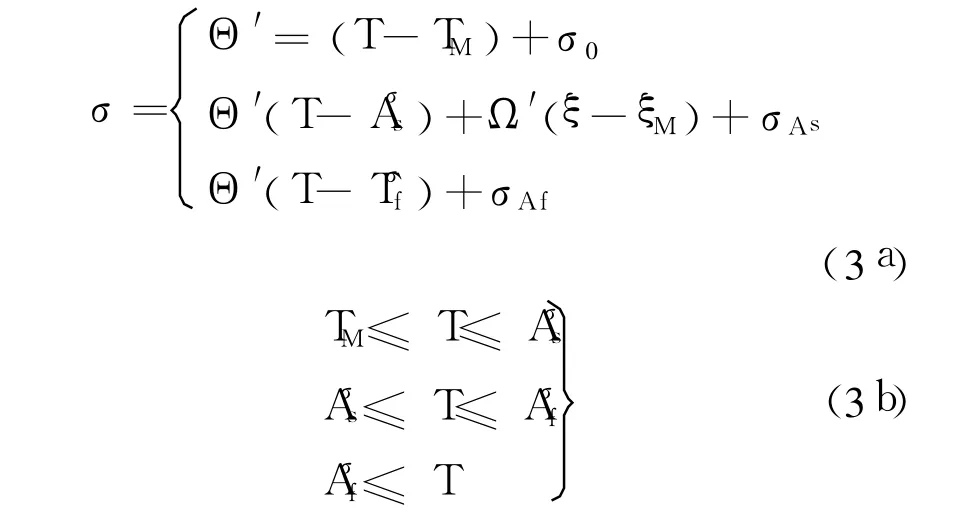
式中,TM為升溫初始溫度;σ0為相應的初始應力;為應力作用下奧氏體相變開始與結束溫度 ;σAs,σAf為相應應力 .
2.3 驅動器設計及性能分析
根據 2.1中提出的 SMA絲-驅動單元設計方法分別對解鎖單元和鎖緊單元進行設計,得出彈簧參數表如表 1所示.
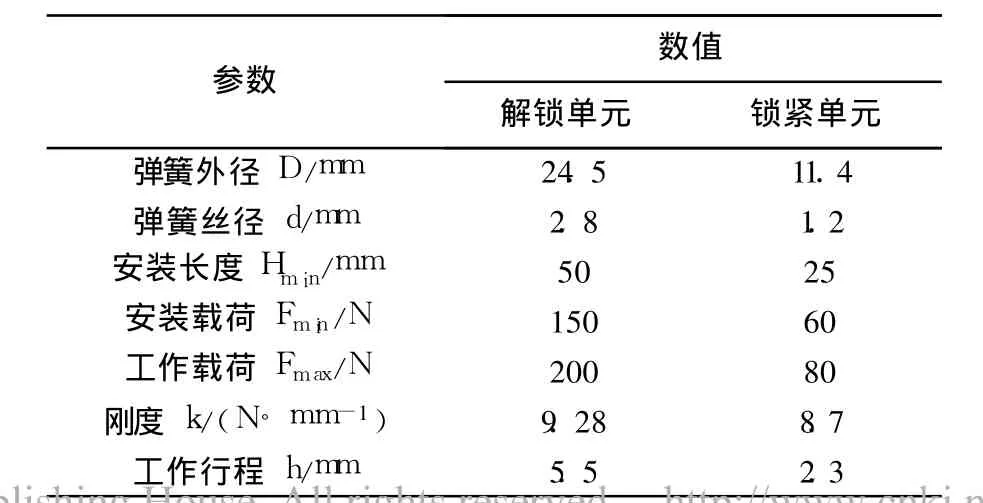
表 1 驅動單元彈簧設計參數表
根據表 1中的設計參數,用 Liang模型對解鎖單元驅動性能進行分析.選用對 SMA絲通電加熱及熱輻射方式傳導,通電電壓為 7.0V,得到設計參數下的“作動距離-時間”關系曲線,如圖 7所示.由圖可知,驅動單元最大作動距離為 5.6mm對應時間為 4.5s,可知解鎖驅動單元能在 5.0s內完成解鎖(只要作動位移大于 5.5mm即可完成解鎖),而且作動位移略大于設計行程 5.5mm,使得驅動單元在作動位移上有一定的裕度.
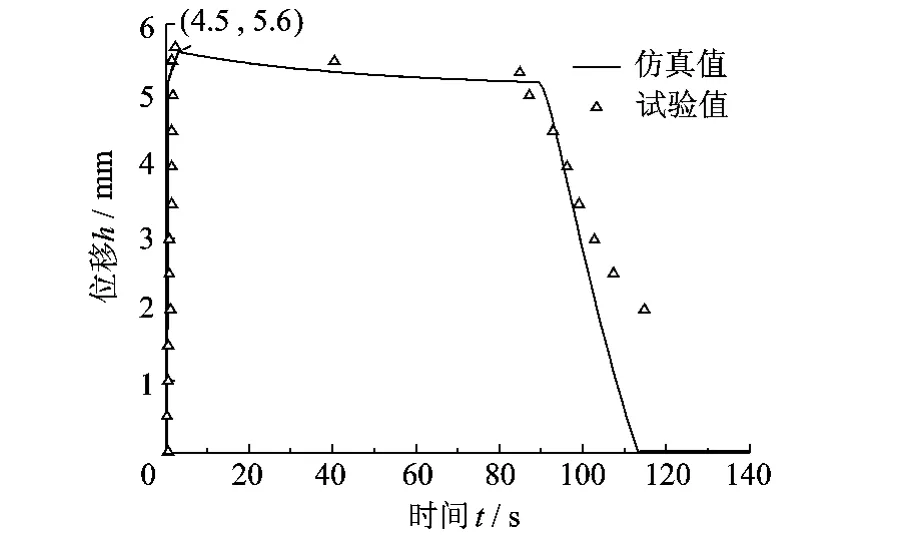
圖7 解鎖單元作動距離-時間仿真實驗對比圖
3 試驗分析
在上述設計工作基礎上,完成了 SMA鎖緊機構的的零件加工與裝配.為了驗證 SMA鎖緊機構能否滿足作動距離、鎖緊時間、鎖緊同步性、振動和高溫環境的技術要求,本文對 SMA鎖緊機構分別進行了性能測試、振動試驗和高溫環境試驗.
性能測試表明:單個 SMA鎖緊機構平均解鎖時間為 5.6 s,鎖緊時間為 0.9s,多個 SMA鎖緊機構鎖緊同步性小于 0.5 s,解鎖同步性小于 1.0s.從圖 7可知,解鎖單元作動距離實驗值和仿真結果吻合得很好.
用 4個 SMA鎖緊機構共同鎖緊一個飛輪,飛輪重 7.5kg,并將飛輪安裝到振動試驗臺進行試驗,在振動前后磁懸浮飛輪的固有頻率基本沒有發生變化,說明在振動試驗過程中,SMA鎖緊機構沒有發生松動.高溫環境試驗顯示 SMA鎖緊機構在溫度低于 90℃內鎖緊不失效.
4 結 論
本文實現了利用 SMA絲驅動的空間磁懸浮飛輪鎖緊機構的研制,在機構設計中采用了多處新穎結構設計,并發展了 SMA絲-彈簧驅動單元設計方法,對解鎖和鎖緊單元進行了設計,最終研制出了 SMA驅動的小型空間磁懸浮飛輪鎖緊機構,并完成了相關的地面性能測試、振動試驗和高溫環境試驗.研究結果表明:此次發展的 SMA鎖緊機構安裝體積小,在星載28V電壓下能在6.0s內完全鎖緊,在 1.0 s內完全解鎖,并能夠完全通過振動和環境實驗.SMA驅動的磁懸浮飛輪鎖緊機構具有鎖緊力大、同步性好、可重復使用、低沖擊、無污染等優勢,有很大的工程應用潛力.
References)
[1]吳剛,劉昆,張育林.磁懸浮飛輪技術及其應用研究[J].宇航學報,2005,26(3):385-390 Wu Gang,Liu Kun,Zhang Yulin.Application and study ofmagnetic bearing flywheel technology[J].Journal of Astronautics,2005,26(3):385-390(in Chinese)
[2]周潔.用于衛星飛輪的磁懸浮驅動技術研究與展望[J].微電機,2003,36(2):43-46 Zhou Jie.Survey on the research and development of bearing less driver used as flywheel in satellite system[J].Micro Mortor,2003,36(2):43-46(in Chinese)
[3]Privat M,Costa AD.Pneumatic locking device for magnetic bearing reaction wheel[C]//Harris R A.Proceedings of the 10th European Space Mechanisms and Tribology Symposium.San Sebastián,Spain:ESA Publications Division,2003:121-128
[4]劉曉東,余立輝.磁懸浮飛輪自動鎖緊系統的研制[J].機械與電子,2007,1(3):33-36 Liu Xiaodong,Yu Lihui.Development of automatic locking system for magnetic bearing flywheel[J].Machinery and Electronics,2007,1(3):33-36(in Chinese)
[5]Razov A,Cherniavsky A.Application of SMAs in modern spacecraft and devices[J].EDP Sciences,2003,112:1173-1176
[6]杜彥良.自動探測裂紋和主動控制裂紋擴展的智能材料結構研究[D].北京:北京航空航天大學能源與動力工程學院,1993 Du Yanliang.AResearch on intelligent material structures for active detecting and control the growth of cracks[D].Beijing:School of Jet Propulsion,Beijing University of Aeronautics and Astronautics,1993(in Chinese)
[7]Liang C,Roger C A.A one-dimensional thermo mechanical constitutive relation of shapememory materials[J].Journal of Intelligent Material Systems and Structures,1990,1(2):207-234
[8]成大先.機械設計手冊[M].北京:化學工業出版社,2004:325-350 ChengDaxian.Mechanical design manual[M].Beijing:Chemistry Industry Press,2004:325-350(in Chinese)
(編 輯 :張 嶸)
Prototype SMA actuated locking device for small space magnetic bearing flywheels
Yan Xiaojun Zhang Xiaoyong Nie Jingxu
(School of Jet Propulsion,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Zhang Shaowei
(Beijing Institute of Control Engineering,Beijing 100190,China)
Based on magnetic levitation principle,the magnetic bearing flywheel is a new type of inertial actuator used in satellite attitude control.A locking device was used to eliminate thegap between the rotor and stator of magnetic bearing flywheel so as to protect it from shock and vibration damage during launch phase.The present pyrotechnical or motor actuated locking devices have the disadvantages of high shock,large size and un-resetable.A prototype shapememory alloys(SMA)actuated locking device for small space magnetic bearing flywheel was developed in this investigation.A method and procedures to design the actuator element based on Liang's constitutive model was presented.Then the SMA locking device was as sembled and the function,environment and vibration tests were carried out.Test results show that the device can complete lock function within 6s and release function within 1s under satellite powersupply of28V.Itcan also undergo the environment and vibration tests which simulate the launch phase.It is concluded that the new SMA locking device owning advantages of great locking force,small size,low shock and easy to reset has a potential use in space engineering.
shapememory alloy;magnetic bearing flywheel;space locking device;constitutivemodel;design method
V 47
A
1001-5965(2011)02-0127-05
2009-12-17
全國優秀博士學位論文作者專項資助項目(200351);新世紀優秀人才支持計劃(NCET-06-0178)
閆曉軍(1973-),男,教授,yanxiaojun@buaa.edu.cn.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04