ISAR艦船目標(biāo)成像時(shí)間段選取
2011-03-14 06:48:24姜義成
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2011年7期
關(guān)鍵詞:方法
王 冉,姜義成
(哈爾濱工業(yè)大學(xué)電子工程技術(shù)研究所,150001哈爾濱,wr0905@sina.com)
逆合成孔徑雷達(dá)(ISAR)是一種為人們熟知的獲得遠(yuǎn)距離非合作運(yùn)動目標(biāo)雷達(dá)圖像的技術(shù).目前當(dāng)海情較高(3級以上海情)時(shí),艦船目標(biāo)的ISAR成像來源主要是海浪起伏引起的艦船搖擺運(yùn)動.由于艦船運(yùn)動復(fù)雜,在實(shí)際成像環(huán)境中海情和艦船運(yùn)動狀態(tài)未知,變化難以預(yù)料,成像具有較高難度.若正確選擇成像時(shí)刻和成像積累時(shí)間,利用艦船的自身搖擺可在較短的合成孔徑時(shí)間內(nèi)得到有利于艦船目標(biāo)識別的高質(zhì)量圖像.ISAR艦船目標(biāo)實(shí)測數(shù)據(jù)在進(jìn)行成像處理之前,應(yīng)選擇合適的成像時(shí)刻和成像積累時(shí)間,以得到最利于目標(biāo)識別的清晰圖像.傳統(tǒng)的方法是對運(yùn)動補(bǔ)償之后的數(shù)據(jù)進(jìn)行多普勒中心估計(jì),據(jù)此來確定成像時(shí)刻和成像積累時(shí)間[1-4].這種方法的優(yōu)點(diǎn)是計(jì)算量小,便于快速實(shí)現(xiàn),而且可同時(shí)得到最佳成像時(shí)刻和最佳成像積累時(shí)間的估計(jì)值.缺點(diǎn)是無法根據(jù)對回波數(shù)據(jù)的分析得到艦船目標(biāo)的最佳俯視圖和側(cè)視圖的成像時(shí)刻,而這對于艦船目標(biāo)的識別是很重要的.根據(jù)對艦船在高海情下三維轉(zhuǎn)動的特點(diǎn),文獻(xiàn)[5-6]提出了一種可得到艦船目標(biāo)最佳俯視圖和側(cè)視圖成像時(shí)刻的方法.這種方法克服了多普勒中心估計(jì)法無法得到艦船目標(biāo)的最佳俯視圖和側(cè)視圖成像時(shí)刻的缺點(diǎn),但是實(shí)現(xiàn)比較復(fù)雜,運(yùn)算量偏大,限制了它的應(yīng)用范圍.
本文對文獻(xiàn)[6]的成像時(shí)刻選擇方法進(jìn)行了改進(jìn),形成1個清晰的成像時(shí)刻選取的流程.通過該流程可確定ISAR艦船目標(biāo)最佳俯視圖和側(cè)視圖的成像時(shí)刻.定義了圖像對比度,并以此為標(biāo)準(zhǔn)來確定最優(yōu)成像積累時(shí)間.最后,用實(shí)測數(shù)據(jù)驗(yàn)證了本文方法的有效性.
1 圖像對比度準(zhǔn)則
首先對ISAR原始數(shù)據(jù)進(jìn)行處理,得到1幅ISAR圖像記為I(m,n,a,b),其中含有m個多普勒單元和n個距離單元,a為成像起始時(shí)刻,b為成像積累時(shí)間.定義圖像對比度SIC(a,b)為

式中:E是對于變量m、n取均值的算子.由式(1)可見,SIC是I(m,n,a,b)的歸一化標(biāo)準(zhǔn)差.SIC(a,b)可作為衡量1幅ISAR圖像聚焦的標(biāo)準(zhǔn).
在式(1)中,分子是圖像矩陣的標(biāo)準(zhǔn)差.以多散射點(diǎn)模型為例,可以看出當(dāng)圖像聚焦很好時(shí),圖像矩陣中第i個散射點(diǎn)(mi,ni)位置處及其附近很小的鄰域Ui內(nèi)將出現(xiàn)遠(yuǎn)大于圖像均值E[I(m,n,a,b)]的幅度值I(mu,nu,a,b),其中(mu,nu)∈Ui,u=1,2,…,i,…,此時(shí)圖像的標(biāo)準(zhǔn)差會很大;而當(dāng)圖像聚焦很差時(shí),圖像矩陣中各點(diǎn)幅度值I(m,n,a,b)都圍繞在圖像均值E[I(m,n,a,b)]附近,此時(shí)圖像的標(biāo)準(zhǔn)差要比聚焦好時(shí)小.因此圖像聚焦越好,SIC就會越大.
式(1)中的分母代表了該幅圖像幅度的均值,運(yùn)用它對SIC進(jìn)行歸一化.這樣做的意義在于便于用圖像對比度對多個不同大小的圖像進(jìn)行聚焦程度的比較.
2 基于圖像對比度最大準(zhǔn)則的最優(yōu)成像時(shí)刻和最優(yōu)成像積累時(shí)間的選擇
由式(1)可見圖像對比度是該幅圖像成像起始時(shí)刻a和成像積累時(shí)間b的函數(shù).因此,最優(yōu)成像時(shí)刻和最優(yōu)成像積累時(shí)間的選取問題,可轉(zhuǎn)化為求當(dāng)SIC(a,b)取最大值時(shí)a、b的取值問題,即

因?yàn)閍與b都是離散變量,因此這是1個求解二維離散函數(shù)極值的問題.通常一段ISAR回波數(shù)據(jù)中包含上萬個回波信號,因此直接對SIC的極值進(jìn)行搜索,計(jì)算量將相當(dāng)大.文獻(xiàn)[7]提出了一種將二維搜索簡化成2個一維線性搜索的方法:
1)設(shè)b=bin,其中bin為b的初始值.bin由不同的ISAR系統(tǒng)參數(shù)及目標(biāo)類型決定.計(jì)算
3 艦船目標(biāo)最佳俯視圖和側(cè)視圖成像時(shí)刻選取
本節(jié)對文獻(xiàn)[6]的艦船目標(biāo)成像時(shí)刻的選擇方法進(jìn)行了改進(jìn),提出了新的艦船目標(biāo)最佳俯視圖或側(cè)視圖的成像時(shí)刻選擇方法,如圖1所示.
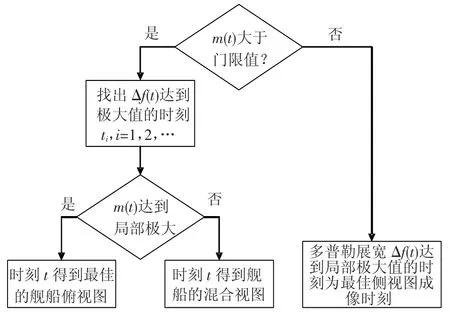
圖1 艦船目標(biāo)最優(yōu)成像時(shí)刻選取流程
圖中m(t)為船體中心線斜率函數(shù),Δf(t)為多普勒展寬函數(shù),它們都是慢時(shí)間的函數(shù).m(t)與艦船有效轉(zhuǎn)動角速率的垂直分量以及雷達(dá)視角的正切函數(shù)成正比.由于在觀測期間內(nèi)雷達(dá)視角變化很小,因此m(t)可以反應(yīng)艦船有效轉(zhuǎn)動角速率垂直分量的大小.Δf(t)隨時(shí)間的變化反映合成有效轉(zhuǎn)動角速率的變化.當(dāng)艦船有效轉(zhuǎn)動角速率的垂直分量占主導(dǎo)地位,即m(t)取局部極大值時(shí),將得到艦船最佳俯視圖.當(dāng)艦船有效轉(zhuǎn)動角速度的水平分量占主導(dǎo)地位,即Δf(t)取局部極大值,而m(t)取局部極小值時(shí),將得到艦船目標(biāo)的最佳側(cè)視圖.因?yàn)檫@樣的Δf(t)和m(t)取值表明艦船的合成有效轉(zhuǎn)動角速率局部最大,同時(shí)它在垂直方向上的分量局部最小,因此它在水平方向上的分量很大,而合成有效轉(zhuǎn)動角速率的水平分量正是艦船目標(biāo)側(cè)視圖的成像來源.
估計(jì)艦船中心線斜率函數(shù)m(t)的步驟如下:
2)由于海雜波干擾和短時(shí)間距離多普勒成像的聚焦性不佳,對時(shí)間段內(nèi)的圖像選擇一灰度門限ITh,小于門限的像素灰度設(shè)為零,其中門限ITh=IMAX/10;
3)然后對圖像Hough變換,選出變換后圖像的最大值點(diǎn),即可求出最大值角度θ,根據(jù)Hough變換的定義,艦船中心線的角度值為mi=θ+ 90°.
估計(jì)多普勒展寬函數(shù)Δf(t)的步驟如下:
2)由于海雜波干擾和短時(shí)間距離多普勒成像的聚焦性不佳,對時(shí)間段內(nèi)的圖像選擇一灰度門限ITh,小于門限的像素灰度設(shè)為零,其中門限的大小可設(shè)定為圖像灰度最大值的1/10左右,即ITh=IMAX/10;
3)對距離單元進(jìn)行逐個搜索,找出第j號距離單元內(nèi)的所有艦船散射點(diǎn),并記錄下這些散射點(diǎn)中多普勒值最小的點(diǎn)與多普勒值最大的點(diǎn)的多普勒值fj,min與fj,max,其中取fj,min最小值記為fmin,記fj,max最大值為fmax.其差值fmax-fmin為該幅圖像的多普勒展寬,記為Δfi.
用以上方法可得到ISAR艦船圖像的最優(yōu)俯視圖或側(cè)視圖的成像時(shí)刻^a.然后計(jì)算式(2)得到最優(yōu)成像積累時(shí)間^b的估計(jì)值.需注意的是,這里的^a是以回波數(shù)來表示的,它和慢時(shí)間t是一一對應(yīng)的關(guān)系.
本文方法相對于文獻(xiàn)[5-6]的改進(jìn)有如下兩點(diǎn):
1)在估計(jì)艦船中心線斜率函數(shù)m(t)和多普勒展寬函數(shù)Δf(t)時(shí),短時(shí)成像采用了距離多普勒算法,而沒有如文獻(xiàn)[5]那樣采用短時(shí)傅立葉算法.這是因?yàn)樵诤芏痰某上穹e累時(shí)間內(nèi),艦船的運(yùn)動是近似平穩(wěn)的,因此用距離多普勒算法進(jìn)行短時(shí)成像可以滿足計(jì)算精度的需要.而且該方法相比短時(shí)傅立葉變換法計(jì)算量大大降低,也不存在短時(shí)傅立葉變換法由于變換本身時(shí)頻聚集性不高而導(dǎo)致的成像模糊的缺點(diǎn).
2)本文對文獻(xiàn)[5-6]中的俯視圖和側(cè)視圖選取的方法進(jìn)行了整合,可以更清楚的反映出俯視圖和側(cè)視圖成像數(shù)據(jù)段選取的本質(zhì).整個過程也簡潔實(shí)用,如圖1所示.
4 實(shí)測數(shù)據(jù)驗(yàn)證
采用某段艦船目標(biāo)的ISAR實(shí)測數(shù)據(jù)對上述方法進(jìn)行驗(yàn)證.首先用第3節(jié)提出的方法確定最優(yōu)成像時(shí)刻^a.用于快速成像的時(shí)間段Tib長度為512個回波,采用距離-多普勒(RD)算法進(jìn)行成像.依次得到船體中心線斜率m(a)和多普勒展寬單元數(shù)Δf(a)對開始積累回波數(shù)a的變化.由圖1和如下所示的圖2可知,回波數(shù)a=2 048時(shí),Δf(a)達(dá)到最大值,這時(shí)m(a)并不處于最大值.因此,^a=2 048時(shí)將得到艦船目標(biāo)的最佳側(cè)視圖.回波數(shù)a=512時(shí),m(a)處于最大值,因此,艦船運(yùn)動以偏航為主,但此時(shí)Δf(a)并沒有達(dá)到最大.因此,^a=512時(shí)將得到艦船目標(biāo)相對較好的俯視圖.圖3為積累回波數(shù)b與圖像對比度SIC的關(guān)系.b從1 024個回波開始,每次增加12個回波.其中圖3(a)為a=2 048的情況,在^b=1 156時(shí)SIC取最大值16.817.圖3(b)為a=512時(shí)的情況,在^b=1 552時(shí)SIC取最大值16.698.
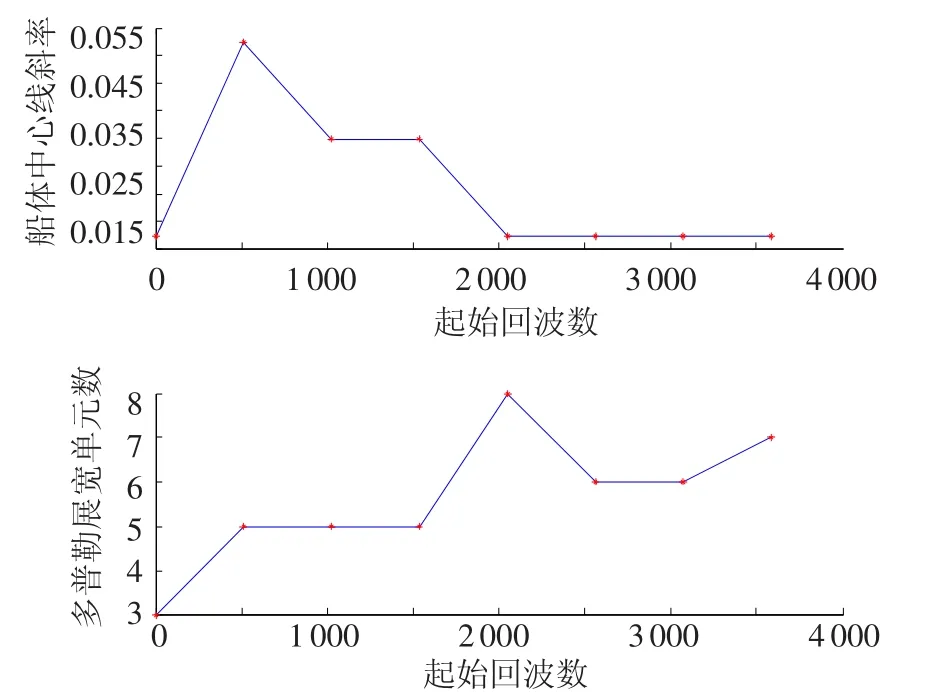
圖2 艦船實(shí)測數(shù)據(jù)船體中心線斜率和多普勒展寬
圖4為艦船實(shí)測數(shù)據(jù)的最終成像結(jié)果.圖4(a)為^a=2 048,^b=1 156條件下艦船目標(biāo)的距離-多普勒(RD)算法成像結(jié)果.從圖中可見,在^a=2 048,^b=1 156時(shí)得到了艦船最佳側(cè)視圖,而且聚焦度很好.圖4(b)為 ^a=512,^b= 1 552條件下艦船目標(biāo)的距離 -多普勒(RD)算法成像結(jié)果.從圖中可見,在^a=512,^b=1 552時(shí)得到了艦船比較好的俯視圖,這從艦船圖像最左側(cè)的部分和圖4(a)對比可以看出,聚焦度也很好.圖4驗(yàn)證了本文算法的有效性.因?yàn)椴捎玫氖荝D算法完成最后的成像,所以相對于時(shí)頻分析方法計(jì)算量也很小.
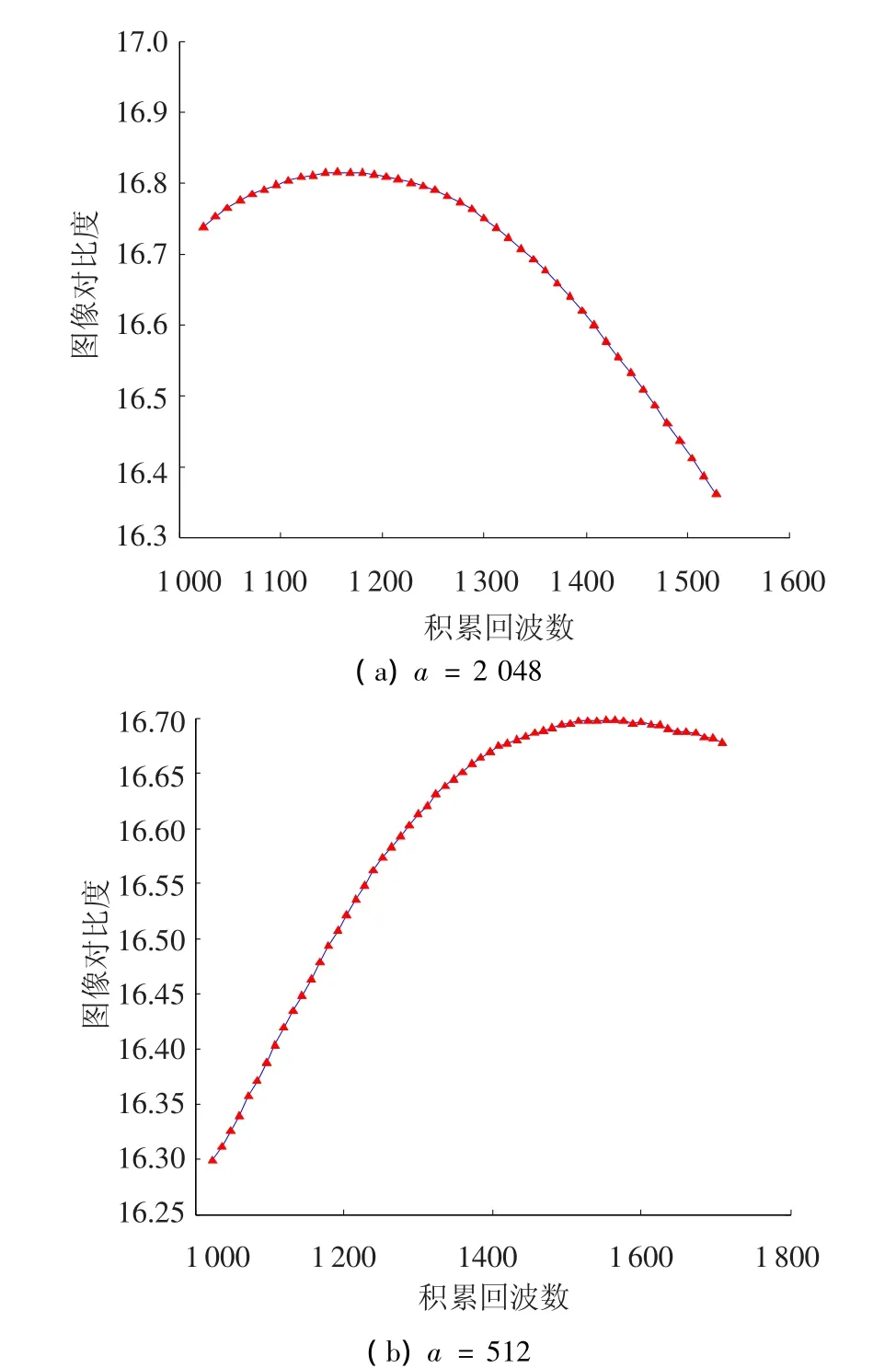
圖3 積累回波數(shù)b與圖像對比度SIC的關(guān)系
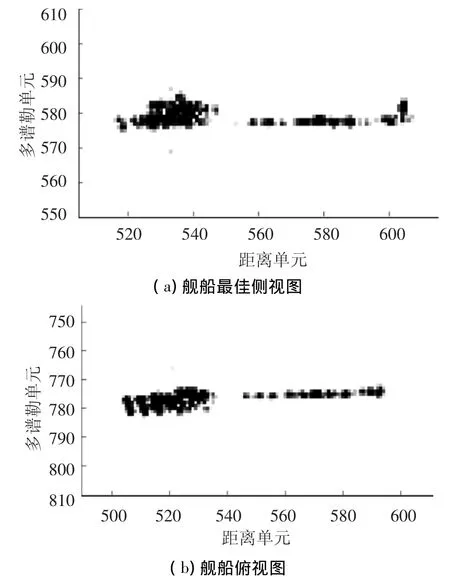
圖4 艦船實(shí)測數(shù)據(jù)最終成像結(jié)果
5 結(jié)論
針對ISAR艦船目標(biāo)的成像數(shù)據(jù)段選取問題,本文對現(xiàn)有的幾種成像數(shù)據(jù)段選取方法進(jìn)行了歸納.在簡要總結(jié)了這些方法的優(yōu)缺點(diǎn)的基礎(chǔ)上,采用圖像對比度準(zhǔn)則作為評價(jià)ISAR圖像聚焦程度的標(biāo)準(zhǔn).根據(jù)ISAR艦船目標(biāo)成像的特點(diǎn),為得到便于目標(biāo)識別的艦船俯視圖和側(cè)視圖,對文獻(xiàn)[6]的成像時(shí)刻選取方法進(jìn)行了改進(jìn),首先得到艦船最優(yōu)俯視圖或側(cè)視圖成像時(shí)刻,再通過使圖像對比度最大得到最優(yōu)的成像積累時(shí)間.艦船實(shí)測數(shù)據(jù)的成像結(jié)果驗(yàn)證了本文方法的有效性.
[1]SMITH A M.A New approach to range-doppler SAR processing[J].International Journal of Remote Sensing,1991,12(2):235-251.
[2]RANEY R K,RUNGE H,BAMLER R.Precision SAR processing using chirp scaling[J].IEEE Trans on GRS,1994,32(4):786-799.
[3]SUN Haiping,XING Mengdao,ZHOU Lijuan.Division of imaging intervals and selection of optimum imaging time for ship ISAR imaging based on measured data[C]//Proceedings of CIE International Conference on Radar 2006.Shanghai:[s.n.],2006:983-986.
[4]阮敏,羅代升,陳默,等.SAR成像系統(tǒng)中多普勒中心頻率fD和模糊數(shù)m的估計(jì)[J].四川大學(xué)學(xué)報(bào)(自然科學(xué)版),2005,42(5):963-968.
[5]汪玲,朱兆達(dá),朱岱寅.機(jī)載ISAR艦船側(cè)視和俯視成像時(shí)間段選擇[J].電子與信息學(xué)報(bào),2008,30 (12):2835-2839.
[6]PASTINA D,MONTANARI A,APRILE A.Motion estimation and optimum time selection for ship ISAR Imaging[C]//IEEE Radar Conference 2003.Huntsville:[s.n.],2003:7-14.
[7]MARTORELLA M,BERIZZI F.Time windowing for highly focused ISAR image reconstruction[J].IEEE Trans on AES,2005,41(3):992-1007.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
