一種地磁導(dǎo)航中的低頻電磁干擾場(chǎng)分離方法
2011-03-12 14:05:32寇義民夏紅偉王常虹
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2011年7期
寇義民,夏紅偉,劉 睿,王常虹
(哈爾濱工業(yè)大學(xué)空間控制與慣性技術(shù)研究中心,150080哈爾濱,kouyimin@126.com)
地磁場(chǎng)的精確測(cè)量是實(shí)現(xiàn)地磁導(dǎo)航的先決條件.由于地磁場(chǎng)的微弱性,提高測(cè)量傳感器的靈敏度,以及克服來(lái)源于載體自身的磁場(chǎng)干擾是決定測(cè)量精度的兩大核心因素.隨著科學(xué)技術(shù)的快速發(fā)展,超高靈敏度的新型磁場(chǎng)測(cè)量設(shè)備的相繼問(wèn)世,及傳統(tǒng)的磁測(cè)儀器測(cè)量精度的不斷提高[1],使得磁場(chǎng)傳感器的靈敏度已經(jīng)不再是阻礙地磁場(chǎng)測(cè)量精度提高的主要瓶頸,因此,如何克服來(lái)源于載體自身的磁場(chǎng)干擾將是提高地磁場(chǎng)測(cè)量精度的關(guān)鍵.
載體自身的干擾磁場(chǎng)按照其特性可以分為兩類:第一類是與載體運(yùn)動(dòng)姿態(tài)無(wú)關(guān)的干擾場(chǎng),這類干擾除了載體的部件材料被磁化而產(chǎn)生的恒磁干擾之外,通常來(lái)自機(jī)載的各種電器設(shè)備,如無(wú)線電設(shè)備、電源及輸電線路、電機(jī)、數(shù)字開(kāi)關(guān)電路等;第二類是與載體運(yùn)動(dòng)姿態(tài)相關(guān)的磁場(chǎng)干擾,包括載體中的軟磁材料被地磁場(chǎng)磁化而產(chǎn)生的激磁干擾,載體在地磁場(chǎng)中運(yùn)動(dòng)而產(chǎn)生的渦流磁場(chǎng)干擾等.其中,第二類干擾可以由航磁補(bǔ)償技術(shù)解決,即通過(guò)求解TOLLES-LAWSON方程來(lái)獲取與姿態(tài)有關(guān)的各類干擾磁場(chǎng)的相關(guān)比例系數(shù),進(jìn)而根據(jù)當(dāng)前載體姿態(tài)對(duì)干擾場(chǎng)進(jìn)行估計(jì)[2-3].目前航磁補(bǔ)償技術(shù)已經(jīng)非常成熟,并出現(xiàn)了許多系列化產(chǎn)品,例如加拿大RMS公司生產(chǎn)的AADC-Ⅱ型航空磁自動(dòng)數(shù)字補(bǔ)償儀,可將第二類干擾的影響降低至0.035~0.08 nT(補(bǔ)償后標(biāo)差)[4].而對(duì)于第一類干擾,目前所能采取的技術(shù)手段主要有兩種,即磁屏蔽技術(shù)和帶通濾波器技術(shù).然而,前者雖可大幅削弱干擾場(chǎng)強(qiáng),卻難以完全消除其影響[5];而后者對(duì)于頻率范圍與地磁場(chǎng)相近的干擾磁場(chǎng)則無(wú)能為力.如何進(jìn)一步清除傳統(tǒng)技術(shù)手段層層過(guò)濾下的“漏網(wǎng)之魚(yú)”,也就是強(qiáng)度和頻率都與地磁場(chǎng)信號(hào)相近的低頻、弱磁干擾磁場(chǎng),將是本文研究的重點(diǎn).
獨(dú)立特征量分析法(Independent Component Analysis,簡(jiǎn)稱ICA)可有效的對(duì)線性疊加的獨(dú)立信號(hào)進(jìn)行波形分離[6-11],并被廣泛應(yīng)用到了圖像與聲音等信號(hào)的處理當(dāng)中.但由于磁場(chǎng)為矢量場(chǎng),干擾場(chǎng)的幅值與方向都具有時(shí)變特性,它們的疊加并非簡(jiǎn)單的線性疊加,故不能將線性ICA方法直接應(yīng)用于磁場(chǎng)測(cè)量信號(hào)的分離.針對(duì)這個(gè)問(wèn)題,本文提出了全新的解決方案.該方案首先對(duì)產(chǎn)生干擾磁場(chǎng)的電路的各個(gè)支路各自產(chǎn)生的磁場(chǎng)特性進(jìn)行了分析,進(jìn)而將各個(gè)支路進(jìn)行分組,每組支路各自看做是1個(gè)獨(dú)立干擾源,從而使得每個(gè)干擾源都產(chǎn)生相對(duì)載體方向固定的干擾場(chǎng),解決了干擾場(chǎng)方向時(shí)變的問(wèn)題.同時(shí),對(duì)載體的姿態(tài)提出要求,最終以增加干擾源數(shù)目為代價(jià),將各種磁場(chǎng)的疊加由總幅值的非線性疊加,化簡(jiǎn)成為在傳感器敏感軸方向上的線性疊加,從而滿足了線性ICA的應(yīng)用前提.最后,提出使用相關(guān)系數(shù)的絕對(duì)值對(duì)分離后的信號(hào)波形與地磁圖進(jìn)行匹配的方法,從而有效克服了ICA自身的模糊性缺陷.
1 ICA方法在磁場(chǎng)信號(hào)分離中遇到的困難
1.1 ICA方法簡(jiǎn)介
已知有若干個(gè)相互獨(dú)立的信號(hào)源,彼此發(fā)出互不相關(guān)的波形信號(hào).采用幾個(gè)獨(dú)立探測(cè)器來(lái)檢測(cè)信號(hào)輸出,由于探測(cè)器放置位置距離的不同,每個(gè)探測(cè)器所檢測(cè)到的信號(hào)波形都是原始n個(gè)信號(hào)以不同組分比例的線性疊加.檢測(cè)信號(hào)與源信號(hào)有如下關(guān)系:

式中觀測(cè)向量x代表各傳感器上的信號(hào)輸出,向量s代表信號(hào)源輸出,定常矩陣A代表兩者之間的線性轉(zhuǎn)換關(guān)系,可稱為混疊矩陣.在工程實(shí)踐中,通常只能通過(guò)傳感器輸出獲得觀測(cè)量x,而無(wú)法直接獲得信號(hào)源輸出s與混疊矩陣A.ICA方法將利用信號(hào)源之間相互獨(dú)立的特性和概率統(tǒng)計(jì)學(xué)的理論,來(lái)分離出各個(gè)信號(hào)源的輸出波形.
由概率論中的中心極限定理可知,多個(gè)非高斯獨(dú)立隨機(jī)信號(hào)的線性疊加將比其中任意一路信號(hào)更趨近于高斯分布.根據(jù)這一理論,尋找合適的線性變換對(duì)觀測(cè)向量x進(jìn)行處理,使得結(jié)果向量z中各個(gè)元素對(duì)應(yīng)的信號(hào)所具有的非高斯性都達(dá)到最大時(shí),每個(gè)分離出來(lái)的信號(hào)也就最接近原始的單個(gè)信號(hào).
實(shí)際操作中,ICA的求解過(guò)程通常包含以下3個(gè)步驟:1)對(duì)混合信號(hào)的預(yù)處理,包括中心化,白化.2)選擇或定義非高斯性(獨(dú)立性)的度量,建立目標(biāo)函數(shù).3)利用某種最優(yōu)化方法來(lái)令目標(biāo)函數(shù)達(dá)到極值,從而推導(dǎo)出一種學(xué)習(xí)方法.常用的代價(jià)函數(shù)有峰度、微熵、負(fù)熵、互信息等.
傳統(tǒng)線性ICA方法中,為確保各個(gè)信號(hào)源的輸出可被有效分離,通常有以下假設(shè)約束必須被滿足:1)各個(gè)信號(hào)源的輸出必須彼此相互獨(dú)立,這是ICA能夠?qū)崿F(xiàn)的最基本要求.2)最多只能有1個(gè)信號(hào)源的輸出為高斯分布,多個(gè)高斯信號(hào)的混疊無(wú)法被分離.3)通常要求傳感器的數(shù)目等于信號(hào)源的數(shù)目,也就是令A(yù)為滿秩方陣.
除以上約束外,ICA方法還具有如下含混性:
1)ICA只能分析出各個(gè)信號(hào)源的輸出波形,而無(wú)法分析出其對(duì)應(yīng)幅值.這是因?yàn)椋槍?duì)在僅僅已知測(cè)量值的情況下,對(duì)原始信號(hào)輸出幅值乘入1個(gè)因子的同時(shí),對(duì)系數(shù)矩陣相應(yīng)的列元素除以這個(gè)因子,測(cè)量結(jié)果不變,即換句話說(shuō),si/ki可能取代si作為分離后的信號(hào)波形結(jié)果.
2)分離出的波形結(jié)果是亂序的,也就是無(wú)法與原始信號(hào)源在順序上一一對(duì)應(yīng).這是因?yàn)樵趦H僅已知x的情況下,可以在式(1)中插入任意的置換陣及其逆矩陣,也就是x=AP-1Ps.這里P為單位陣交換了兩行后的矩陣,如果最終將AP-1作為解得的線性轉(zhuǎn)換關(guān)系,同時(shí)將Ps作為分離后的波形結(jié)果,那么將產(chǎn)生亂序的情況.
ICA的具體實(shí)現(xiàn)算法很多,有信息最大化法,基于極大似然估計(jì)的ICA方法,負(fù)熵最大化法,EASI算法,快速固定點(diǎn)算法(FPICA)等,具體請(qǐng)參閱文獻(xiàn)[6],在此不再贅述.
1.2 ICA在地磁導(dǎo)航信號(hào)處理中的問(wèn)題
ICA方法在磁場(chǎng)信號(hào)分離與地磁導(dǎo)航中的主要困難有以下2個(gè)方面:
1)線性化疊加約束難以滿足,而非線性ICA又難以應(yīng)用.
為了簡(jiǎn)化研究問(wèn)題,這里假定載體內(nèi)只存在唯一低頻干擾源,其在載體內(nèi)各點(diǎn)產(chǎn)生的干擾磁場(chǎng)的強(qiáng)度和方向與相對(duì)位置有關(guān).為了將干擾信號(hào)與地磁場(chǎng)信號(hào)分離,根據(jù)ICA的原理,需采用2個(gè)分開(kāi)布置的傳感器.由畢奧 -薩伐爾定律,干擾源在2個(gè)傳感器所處位置上的干擾磁場(chǎng)可分別記為k1δH和k2δH(k1和k2是和距離平方成反比的系數(shù),而δH與干擾源的電流強(qiáng)度成正比),而地磁場(chǎng)在載體內(nèi)部處處相同,記為H.兩個(gè)位置上干擾磁場(chǎng)與地磁場(chǎng)的夾角分別記為θ1和θ2.則由矢量疊加原理和余弦定理,2個(gè)傳感器所測(cè)得的總磁場(chǎng)強(qiáng)度分別為
顯然干擾場(chǎng)信號(hào)與地磁場(chǎng)信號(hào)在傳感器上的疊加屬于非線性疊加,不可能寫(xiě)成方程(1)的形式,故線性ICA方法難以被直接應(yīng)用.那么是否可以應(yīng)用非線性ICA來(lái)解決呢?答案是依然很困難.這是因?yàn)闇y(cè)量值作為非線性函數(shù)時(shí),其參數(shù)不僅包含H與δH,還包含角度值θ1和θ2.而這2個(gè)角度值也可能是時(shí)變的,且互相沒(méi)有明顯關(guān)聯(lián),只能各自看成獨(dú)立信號(hào).這樣傳感器的數(shù)目將小于信號(hào)源的數(shù)目,從而引發(fā)新的問(wèn)題.
2)ICA的含混性對(duì)地磁場(chǎng)信號(hào)的精確匹配產(chǎn)生障礙.這主要包括以下兩點(diǎn):1)分離后的信號(hào)波形中哪個(gè)是地磁場(chǎng)信號(hào)波形,哪個(gè)是雜波干擾的波形;2)即使正確建立了波形信號(hào)間的對(duì)應(yīng)關(guān)系,由于幅值不確定性,在其幅值發(fā)生變化的基礎(chǔ)上,如何與原始地磁圖進(jìn)行匹配.
2 解決方案的論證與推導(dǎo)
2.1 各場(chǎng)源信號(hào)的線性化疊加模型的建立
為了避免求取總磁場(chǎng)的幅值,引入傳感器敏感軸的概念,一旦敏感軸方向確定,磁場(chǎng)測(cè)量值為各磁場(chǎng)信號(hào)向敏感軸投影后的疊加值.若兩傳感器的敏感軸與地磁場(chǎng)方向和干擾場(chǎng)方向的夾角分別為α1(t)和β1(t),α2(t)和β2(t),則有

此時(shí)地磁場(chǎng)信號(hào)與干擾場(chǎng)的信號(hào)滿足了線性化疊加,但是系數(shù)陣看上去卻是時(shí)變的.根據(jù)ICA的前提條件,各個(gè)獨(dú)立信號(hào)在傳感器上的輸出比例組分須是固定的,即比例系數(shù)M1= cos α1(t)/cosα2(t)和 M2= k1cos β1(t)/ k2cos β2(t)須為時(shí)不變的固定值.這里假定β1(t)=β2(t)+γ(t),代入三角函數(shù)有
顯然除非保證β2(t)和γ(t)都為時(shí)不變的值,否則很難保證M2為固定值,這就要求干擾磁場(chǎng)的方向在各個(gè)傳感器的位置處是確定的.M1也與此類似,即只有地磁場(chǎng)方向在載體坐標(biāo)系內(nèi)保持不變才能保證M1具有非時(shí)變特性.
下面研究干擾磁場(chǎng)矢量相對(duì)于載體的方向問(wèn)題.首先來(lái)考慮最簡(jiǎn)單的串聯(lián)電路.根據(jù)畢奧-薩伐爾定律,在t時(shí)刻,微小電流源在空間中任意一固定點(diǎn)P產(chǎn)生的磁場(chǎng)矢量為

其中,μ0為真空磁導(dǎo)率為由電流源到P點(diǎn)處的矢徑,I為電流強(qiáng)度為導(dǎo)線微元所對(duì)應(yīng)的矢量,進(jìn)一步展開(kāi),可得磁場(chǎng)的幅值為

式中θ(l)為在l處導(dǎo)線微元dl與r的夾角,dB的方向由右手定則確定.取串聯(lián)電路上的任意n個(gè)點(diǎn)處的電流微元,它們?cè)赑點(diǎn)處所形成的總磁場(chǎng)為
顯然也是1個(gè)具有上述性質(zhì)的矢量.
對(duì)于更復(fù)雜的含有n個(gè)支路的電路(并聯(lián)或網(wǎng)狀),在只含有1個(gè)電源的情況下,利用式(3)分別求取t時(shí)刻所有n個(gè)支路在P點(diǎn)處的總磁場(chǎng),進(jìn)行疊加有
這里I(t)為電源輸出總電流,ai(t)(i=1,2,…,n)表示各支路電流與總電流的比值.此時(shí)可分為如下幾種情況分別討論:
1)當(dāng)各支路不含電感與電抗元件時(shí),ai(t)為非時(shí)變固定值,由各支路電阻決定.根據(jù)前面證明,大括號(hào)中的各個(gè)積分項(xiàng)為幅值和方向固定的矢量,它們以固定系數(shù)ai(t)所進(jìn)行的線性疊加仍是幅值和方向固定的矢量,僅和點(diǎn)P的空間相對(duì)位置有關(guān).而括號(hào)外的系數(shù)僅與總電流強(qiáng)度有關(guān).故此時(shí)電路產(chǎn)生的干擾磁場(chǎng)與串聯(lián)電路產(chǎn)生的干擾磁場(chǎng)具有類似的性質(zhì),即方向的確定性.
2)當(dāng)支路中含有電感或者電抗元件,且I(t)為頻率較高的時(shí)變值時(shí),式(5)中的ai(t)也將為時(shí)變值,此時(shí)該電路產(chǎn)生的總干擾磁場(chǎng)將不具備方向確定性.但由于各個(gè)支路各自產(chǎn)生的干擾場(chǎng)仍具備方向確定性,故每個(gè)支路可各自作為1個(gè)獨(dú)立的且具備方向確定性的干擾源來(lái)處理.還可將彼此電流強(qiáng)度比值始終恒定的支路分成一組,作為1個(gè)干擾源,比如幾個(gè)完全對(duì)稱的并聯(lián)支路.
3)當(dāng)支路中含有電感或者電抗元件,且I(t)為頻率很低的時(shí)變值時(shí),電路中的電阻與電抗元件將分別近似于斷路和通路而失去作用,此時(shí)電路產(chǎn)生的總干擾磁場(chǎng)仍具有近似的方向確定性.
通過(guò)以上分析可知,某些類型的電路產(chǎn)生的磁場(chǎng)干擾具有方向確定性.對(duì)于其余類型的電路,通過(guò)將其各個(gè)支路進(jìn)行分組,作為獨(dú)立干擾源看待,也可以使它們產(chǎn)生的干擾磁場(chǎng)各自具有方向確定性.含有多個(gè)電源的更復(fù)雜電路也可以按照前面的思路進(jìn)行分析與分解.
對(duì)于地磁場(chǎng)進(jìn)行分析就簡(jiǎn)單得多了.在同一位置,當(dāng)載體姿態(tài)相對(duì)地理坐標(biāo)系發(fā)生改變的時(shí)候,地磁場(chǎng)與傳感器敏感軸的夾角也會(huì)相應(yīng)發(fā)生變化,故要應(yīng)用ICA,載體是不可以進(jìn)行滾轉(zhuǎn)、俯仰等機(jī)動(dòng)運(yùn)動(dòng)的.同時(shí),隨著空間位置的變化,地磁場(chǎng)的磁傾角與磁偏角也會(huì)發(fā)生變化,它所產(chǎn)生的影響可以從2個(gè)方面來(lái)分析.
首先,根據(jù)IGRF2000模型計(jì)算主磁場(chǎng)磁偏角與磁傾角的變化趨勢(shì),可發(fā)現(xiàn)磁傾角與磁偏角的角度變化非常緩慢.例如,在E70N40位置,磁傾角沿緯度線方向每100 km變化0.983 9°,沿經(jīng)度線方向每100 km變化0.488 5°,而磁偏角沿緯度線方向每100 km變化0.338 2°,沿經(jīng)度線方向每100 km變化0.111 2°.故載體在較短的路徑內(nèi)保持平飛時(shí),主磁場(chǎng)的方向變化是非常微小的.
其次,由于余弦函數(shù)在角度為0附近導(dǎo)數(shù)最小,如果在數(shù)據(jù)收集階段,令傳感器敏感軸近似平行于當(dāng)?shù)氐闹鞔艌?chǎng)方向,可以令主磁場(chǎng)的投影波形受磁傾角磁偏角變化的影響進(jìn)一步減少.可以在開(kāi)始進(jìn)行信號(hào)收集之前,根據(jù)慣導(dǎo)輸出的位置來(lái)估計(jì)當(dāng)?shù)卮牌呛痛艃A角的值,然后根據(jù)這個(gè)值調(diào)整傳感器的敏感軸方向,并在數(shù)據(jù)收集階段始終保持敏感軸相對(duì)載體方向不變.
通過(guò)前面分析,由式(2)與(4)得在單一串聯(lián)電路干擾源條件下磁場(chǎng)信號(hào)的線性疊加公式為
與式(6)類似,可以推出當(dāng)干擾電路的n個(gè)支路被各自作為獨(dú)立干擾源時(shí)(即符合第二種情況)的信號(hào)疊加模型為
其中
此時(shí),總信號(hào)源個(gè)數(shù)為n+1個(gè),角標(biāo)i=1,2,…,n+1,j=1,2,…,n,αi代表地磁場(chǎng)與第i個(gè)傳感器敏感軸的夾角,為接近0的微小量;βij為第j個(gè)干擾源產(chǎn)生的磁場(chǎng)與第i個(gè)傳感器敏感軸的夾角,為固定值,由傳感器與干擾源支路的空間相對(duì)位置決定;rij為第j個(gè)干擾源導(dǎo)線l處的導(dǎo)線微元與第i個(gè)傳感器之間的矢徑;θij(l)為第j個(gè)干擾源在l處的導(dǎo)線微元與rij的夾角.不同支路分組的情況下的疊加公式可由讀者自行推導(dǎo),受篇幅所限這里不再贅述.
2.2 克服信號(hào)分離后結(jié)果的不確定性
當(dāng)ICA可以被實(shí)施之后,下一步的問(wèn)題就是如何克服ICA分離出的信號(hào)的不確定性問(wèn)題.由于ICA方法的含混性,有2個(gè)問(wèn)題需要解決,首先由于順序上的含混性,無(wú)法直接獲知所分離出來(lái)的波形結(jié)果中哪個(gè)是地磁場(chǎng)的測(cè)量值,哪些是干擾磁場(chǎng)測(cè)量值.其次,即便解決了前一個(gè)問(wèn)題,分離后的結(jié)果與實(shí)際波形之間的關(guān)系是先在幅值上乘以系數(shù)然后進(jìn)行平移的關(guān)系,引入相關(guān)系數(shù)的絕對(duì)值,即

其中cov為協(xié)方差函數(shù),R的取值位于[0,1]之間.可以證明,當(dāng)y與s代表2個(gè)波形圖像的幅值時(shí),y與s在圖形上越相似則R的取值越大,如果s與y為線性變換關(guān)系,R的值為1.
在沒(méi)有任何關(guān)于磁場(chǎng)信號(hào)波形先驗(yàn)信息的情況下,只能用所有分離后的波形信號(hào)在慣導(dǎo)系統(tǒng)所指示的路徑附近區(qū)域內(nèi)進(jìn)行搜索匹配,這一點(diǎn)與基于TERCOM的導(dǎo)航定位方法相似.其中能令R取最大值的路徑即為載體經(jīng)過(guò)的實(shí)際路徑,對(duì)應(yīng)的波形也就是分離后的地磁場(chǎng)信號(hào)波形.
2.3 信號(hào)分離與匹配的總體方案
基于前面的分析與推導(dǎo),提出最終方案如下:首先要對(duì)所有電氣設(shè)備干擾源進(jìn)行分析,對(duì)于高頻干擾源采用傳統(tǒng)濾波器處理,對(duì)于低頻干擾源,按前述方法對(duì)電路特性進(jìn)行區(qū)分,獲取主要干擾源的數(shù)目,并布置相應(yīng)數(shù)目加1個(gè)傳感器.在載體飛行過(guò)程中,按照如下步驟進(jìn)行信號(hào)分離和地磁導(dǎo)航定位:
1)準(zhǔn)備階段.當(dāng)發(fā)現(xiàn)載體的慣性導(dǎo)航系統(tǒng)輸出位置明顯偏離實(shí)際位置時(shí),準(zhǔn)備進(jìn)入數(shù)據(jù)收集階段,此時(shí)根據(jù)慣導(dǎo)輸出位置估計(jì)當(dāng)?shù)刂鞔艌?chǎng)方向,并據(jù)此調(diào)整傳感器的敏感軸方向.
2)數(shù)據(jù)收集階段.載體保持平飛,實(shí)時(shí)記錄各個(gè)傳感器敏感軸上的磁場(chǎng)信號(hào).
3)信號(hào)分離階段.對(duì)獲得的信號(hào)采用適當(dāng)?shù)腎CA方法進(jìn)行波形分離.
4)搜索匹配階段.用所有分離后的信號(hào)波形在地磁圖上慣導(dǎo)輸出路徑的附近采用式(7)進(jìn)行搜索匹配,能令相關(guān)系數(shù)最大的信號(hào)波形和路徑即為地磁信號(hào)波形和載體的實(shí)際路徑.
5)校正階段.根據(jù)前面匹配結(jié)果,修正慣導(dǎo)系統(tǒng)累積誤差,載體脫離平飛狀態(tài),可自由機(jī)動(dòng).
3 仿真與結(jié)果分析
地磁異常采用2007年7月第24屆UGG大會(huì)發(fā)布的全球地磁異常圖(WDMAM)中歐洲部分中地磁異常劇烈區(qū)域數(shù)據(jù)作為標(biāo)準(zhǔn)參考[12].從磁圖矩陣網(wǎng)格中抽取一行的一部分作為實(shí)測(cè)地磁數(shù)據(jù).仿真中的干擾電路如圖1所示.圖中電路采用2 Hz的低頻交流電壓源,并具有3個(gè)支路,對(duì)應(yīng)電流i1、i2、i3.由于含有容抗性器件,根據(jù)前面的分析,這3個(gè)支路可看作是3個(gè)獨(dú)立的干擾源.數(shù)據(jù)收集階段所經(jīng)過(guò)路徑上的地磁信號(hào)波形,以及3個(gè)干擾源對(duì)應(yīng)的電流值如圖2所示.圖3為在4個(gè)磁傳感器敏感軸方向上分別檢測(cè)到的磁場(chǎng)波形,為地磁場(chǎng)與干擾場(chǎng)在敏感軸向上投影的疊加.
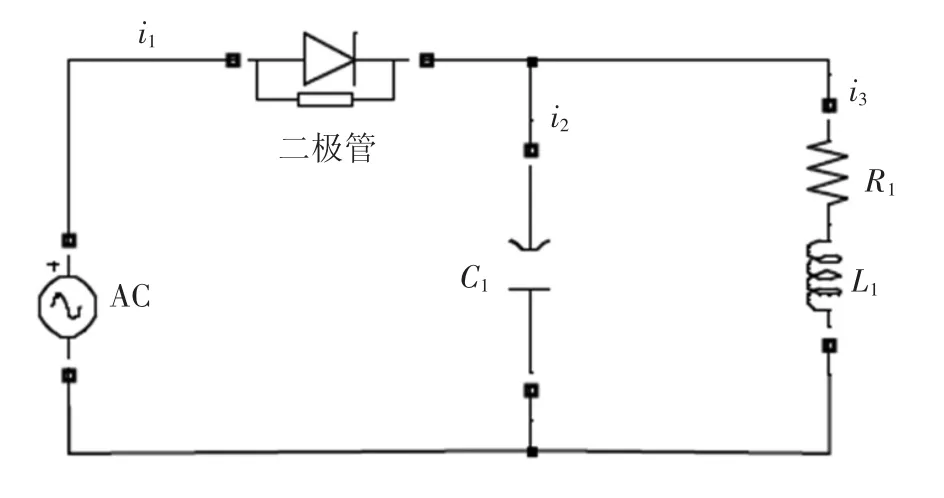
圖1 仿真實(shí)驗(yàn)中所用到的干擾電路
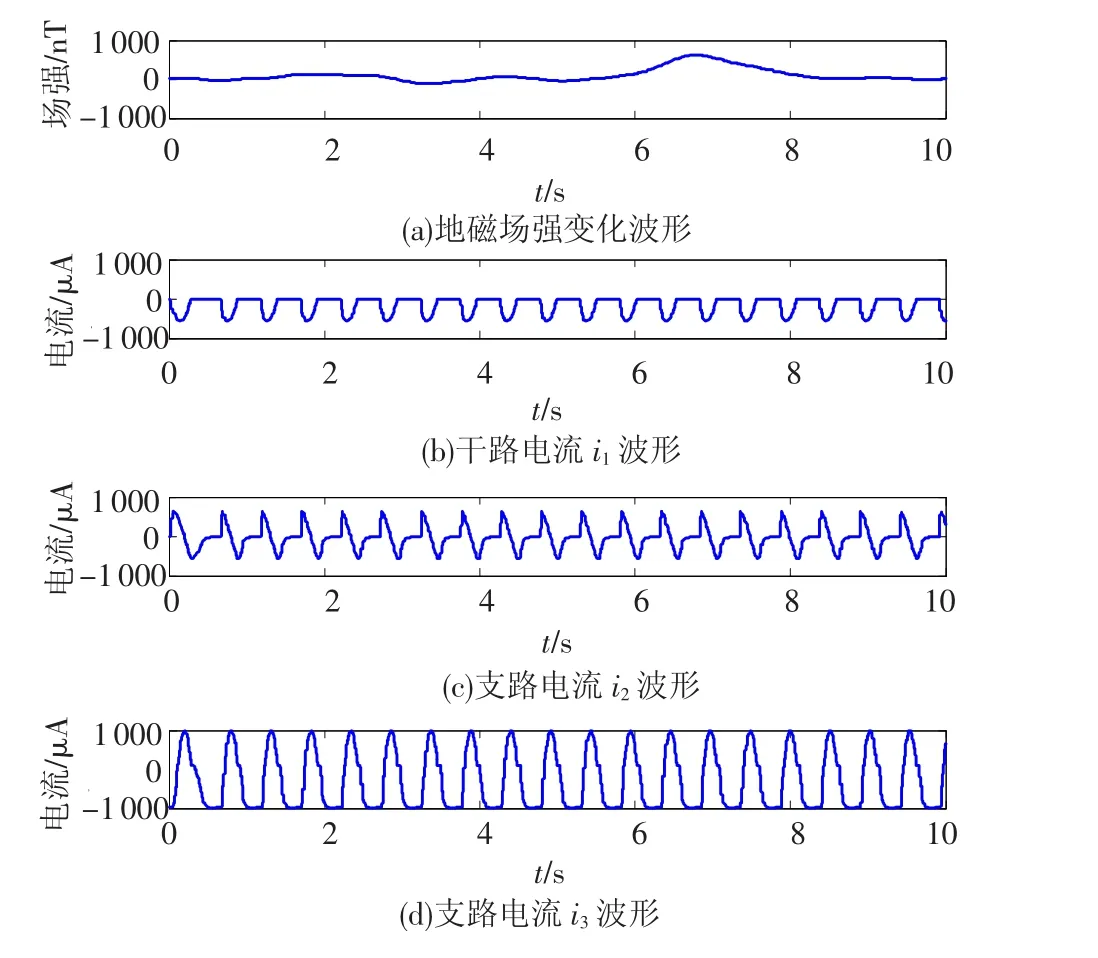
圖2 實(shí)際地磁場(chǎng)強(qiáng)波形和干擾電路各支路的電流波形
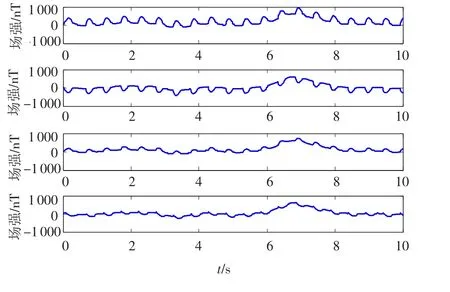
圖3 在3個(gè)傳感器上的混疊后信號(hào)波形
采用ICA中的定點(diǎn)法(FPICA)進(jìn)行信號(hào)分離,為了驗(yàn)證其魯棒性,加入了標(biāo)差為0.1 nT的傳感器測(cè)量噪聲.分離后的信號(hào)波形如圖4所示(由于ICA方法的幅值不確定性,圖4并未給出縱坐標(biāo)):
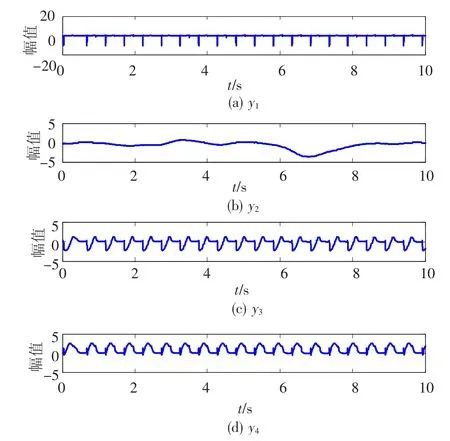
圖4 分離后的信號(hào)波形
從圖中可以看出,分離后的4個(gè)波形y1、y2、y3和y4雖然與原始波形幅值不同,但是在形狀上保留了較大的相似度,相當(dāng)于是對(duì)原始波形進(jìn)行了平移、壓縮、以及翻轉(zhuǎn).用肉眼觀察可以發(fā)現(xiàn)分離后的波形信號(hào)與原始信號(hào)的對(duì)應(yīng)關(guān)系,即地磁信號(hào)對(duì)應(yīng)y2,i1對(duì)應(yīng)y1,i2對(duì)應(yīng)y3,i3對(duì)應(yīng)y4.
這里需要指出的是,電流波形分離后形狀上的失真度較大,而地磁信號(hào)波形分離后形狀上的失真度較小.造成這種現(xiàn)象的原因是三路電流之間具備一定的相關(guān)性(頻率相同,且干路電流i1的幅值為2個(gè)支路電流i2和i3的和),而地磁場(chǎng)信號(hào)與3個(gè)電流卻是完全獨(dú)立的.
采用相關(guān)系數(shù)絕對(duì)值進(jìn)行相關(guān)度驗(yàn)證.這里用H代表載體運(yùn)動(dòng)路徑上的真實(shí)地磁信號(hào),用分離后的4路信號(hào)波形分別與H通過(guò)式(7)計(jì)算相關(guān)度,可得

顯然y2與H相似度最高.
進(jìn)一步,用相似度最大法則在整個(gè)區(qū)域范圍內(nèi)進(jìn)行匹配,匹配后的結(jié)果如圖5所示,圖中橫線為實(shí)際路徑,圓圈為匹配結(jié)果,兩者吻合的非常好.
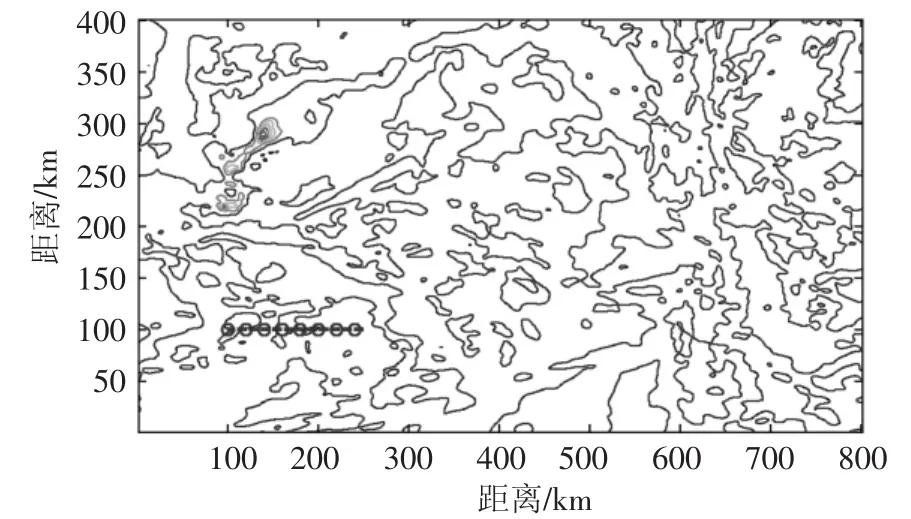
圖5 相關(guān)匹配結(jié)果
4 結(jié)論
本文針對(duì)地磁導(dǎo)航技術(shù)提出了一種克服低頻電氣干擾源影響的解決方案.理論分析與仿真表明,本方案可有效克服傳統(tǒng)ICA方法應(yīng)用于地磁導(dǎo)航中所遇到的2個(gè)主要障礙,即線性化疊加前提無(wú)法滿足,及分離后的信號(hào)存在模糊性而難以精確匹配.本文提出的電路電磁特性分析法,是本方案能夠得以實(shí)施的基礎(chǔ)和關(guān)鍵.但在干擾電路結(jié)構(gòu)復(fù)雜,造成劃分出的干擾源個(gè)數(shù)較多的情況下,可能造成計(jì)算量過(guò)大,匹配花費(fèi)的時(shí)間過(guò)長(zhǎng)的問(wèn)題,這還需要在下一步的研究中進(jìn)一步完善.
[1]涂有瑞.飛速發(fā)展的磁傳感器[J].傳感器技術(shù),1999,18(4):5-18.
[2]BICKEL S H.Small signal compensation of magnetic fields resulting from aircraft maneuvers[J].Aerospace and Electronic Systems,1979,15(4):518-525.
[3]GROOM R W,JIA R,LO B.Magnetic compensation of magnetic noises related to aircraft’s maneuvers in airborne survey[J].BHL Earth Sciences,2004,2:12-16.
[4]劉曉杰.航磁補(bǔ)償技術(shù)研究[D].長(zhǎng)春:吉林大學(xué),2009:5.
[5]袁雪萍,潘加明.電磁屏蔽中的難題——磁場(chǎng)屏蔽[J].電子質(zhì)量,2006(10):70-72.
[6]HYVARINEN A,KARHUNEN J,OJA E.Independent component analysis[M].New York:John Wiley&Sons,2001.
[7]張建明,林亞平.獨(dú)立成分分析的研究進(jìn)展[J].系統(tǒng)仿真學(xué)報(bào),2006,18(4):992-1001.
[8]CARDOSO J F.Blind signal separation:statistical principles[J].Proceedings of IEEE,1998,86(10): 2009-2024.
[9]HYVARINEN A,OJA E.Independent component analysis:algorithms and applications[J].Neural Networks (S0893-6080),2000,13(4/5):411-430.
[10]楊竹青,李勇.獨(dú)立成分分析方法綜述[J].自動(dòng)化學(xué)報(bào),2002,28(5):762-771.
[11]楊英華,吳英華.基于獨(dú)立源分析的過(guò)程監(jiān)測(cè)方法[J].控制與決策,2006,21(10):1190-1196.
[12]KORHONEN J V,F(xiàn)AIRHEAD J D,HAMOUDI M,et al.Magnetic anomaly map of the world(and associated DVD),scale:1∶50 000 000,commission for the geological.map of the world[M].1st ed.Paris:[s.n.],2007.
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂(lè)園·綜合智能(2021年12期)2022-01-18 05:46:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
華人時(shí)刊(2020年13期)2020-09-25 08:21:42
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2016年1期)2016-01-11 16:53:24
