三維跟蹤掃描影像分析方法的實現(xiàn)與精度分析
2011-03-06 04:56:58艾康偉王博偉彭磊華
中國體育科技 2011年3期
艾康偉,王博偉,彭磊華
1 前言
目前在國內,通常采用三維定點錄像分析的方法對運動技術進行診斷和分析。三維定點錄像分析的方法對錄像拍攝的要求是:在使用至少兩臺攝像機拍攝標定框架后,其攝像機的位置和焦距等物理參數(shù)均不能改變,因此,稱之為“三維定點錄像分析的方法”。這種方法一般用來對運動范圍不大的運動項目,如舉重、鉛球等,或雖然運動范圍較大但只對某一技術環(huán)節(jié),如跳高的起跳等,進行三維運動學分析。對于運動范圍較大的運動項目,如分析跳高或三級跳遠的整個運動過程,若采用三維定點錄像分析的方法,所拍攝的運動目標的成像較小,會給圖像的解析造成很大的誤差;此外,大部分的運動過程都發(fā)生在標定框架所覆蓋的空間之外,這對圖像解析的精度造成很大的影響。解決這一問題的途徑可采用三維跟蹤掃描影像分析方法。
三維跟蹤掃描影像分析方法就是攝像機跟蹤運動目標來記錄運動的圖像,并通過專門的圖像解析系統(tǒng)解算得到運動目標空間實際三維坐標的方法。此方法是在三維定點錄像分析方法的基礎上的應用擴展,在國外稱之為Pan/Tilt/Zoom功能。在攝像機架設在位置固定的三角架上后,Pan功能就是攝像機可以繞垂直軸左右搖動,Tilt功能是可以繞水平軸上下?lián)u動,這兩個功能可保證攝像機跟蹤運動目標拍攝圖像;而Zoom功能可實現(xiàn)攝像機在拍攝的過程中其焦距可調,從而保證了盡可能大的運動目標成像。
在國內應用較為普遍的三維運動錄像分析系統(tǒng),如德國的SIM IMotion、美國的Peak Motus等都具有Pan/Tilt/Zoom功能,它們的算法都采用了Volker Drenk[7](1994)研究的Pan/Tilt/Zoom算法。
艾康偉[1]等(2002)采用定點/定焦的拍攝方法對較大范圍進行了標定,獲得了我國優(yōu)秀花樣滑冰雙人滑運動員拋跳4周的三維運動學數(shù)據。但對于三維跟蹤掃描影像分析方法在國內目前還沒有應用的報告;而在國外,已有學者(Reyher,Raschner,Moessner)[6,8,9]采用這種方法獲得了水上運動項目賽艇和障礙滑雪運動員的三維運動學數(shù)據。
在控制點目標觀測與坐標框架換算系統(tǒng)[2]的基礎上,應用德國的SIM IMotion三維運動錄像分析系統(tǒng)的Pan/Tilt/Zoom功能,實現(xiàn)掃描跟蹤攝像運動目標的像坐標到空間實際三維坐標的解算,并對其解算的精度進行初步的分析;并較為詳細的介紹具體的操作流程,可作為今后應用此項分析技術的參考。
2 實驗設計
2.1 實驗目的
在實驗室的條件下,使用兩臺數(shù)碼攝像機按照三維掃描跟蹤影像分析的步驟和要求分別對空間的若干個點(球)和已知長度的運動中的桿進行三維跟蹤掃描錄像,并應用德國的SIM IMotion三維運動錄像分析系統(tǒng)的Pan/Tilt/Zoom功能對空間的若干個點(球)的三維坐標和桿的長度進行解算,同時對空間的若干個點(球)使用全站儀和控制點目標觀測與坐標框架換算軟件系統(tǒng)進行測量和三維坐標的轉換,并將得到的數(shù)據結果與影像分析的結果進行對比,以驗證影像測量方法的可靠性;將影像測量計算得到的桿長度與桿的實際長度進行對比分析以對影像測量的精度進行評估。
2.2 實驗使用的儀器
帶Pan/Tilt/Zoom功能模塊的SIM IMotion三維運動影像分析系統(tǒng)。
數(shù)碼攝像機索尼DCR-HC52E和松下NV-GS55各一臺,用于拍攝標定框架和跟蹤拍攝運動目標。
標定框架兩套,一套(Peak)應用于攝像機的標定和參考坐標系的確定,一套(自制)應用于全站儀測量和錄像解析得到的三維空間絕對坐標數(shù)據的對比分析,兩套框架上各有控制點(球)24個,每個球的直徑35mm。
Topcon GPT-3002N全站儀一臺,控制點目標觀測與坐標框架換算軟件系統(tǒng)和筆記本計算機一臺,用于控制點目標觀測與坐標轉換。
自加工的附加控制點(球)一套共20個,本次實驗使用14個,球的直徑70mm,標準的三角架螺口,可根據現(xiàn)場的條件,以三角架、吸盤、卡夾等形式安裝在必要的空間位置。
用于二維錄像分析標定的L型架一套,兩端點到交點的實際長度均為1.2m。
2.3 實驗現(xiàn)場的布置
根據SIM IMotion三維掃描跟蹤錄像分析系統(tǒng)的要求,在兩臺攝像機掃描跟蹤運動目標的同時,要確保在拍攝的畫面中有2個以上的附加控制點,所以,在本次實驗所安置的14個附加控制點(球)位置,通過左、右兩臺攝像機掃描取景確認,每個畫面背景中都至少有3個以上的控制點。
主標定框架(Peak框架)安放在場地的中央位置,并以主框架坐標系為本次實驗的坐標系,副框架安放在主標定框架的左側,所有14個附加控制點和副框架上的24個控制點的三維空間坐標都將在主框架坐標系中分析和討論。
左、右兩臺攝像機在主框架坐標系的空間位置可通過SIM IMotion三維運動錄像分析系統(tǒng)解算得到(表1),圖1是實驗現(xiàn)場布置示意圖。
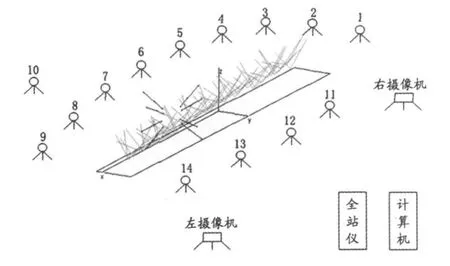
圖1 實驗現(xiàn)場布置示意圖

表1 左,右兩臺攝像機在主框架坐標系的空間位置一覽表(m)
2.4 附加控制點三維空間坐標測量
使用Topcon GPT-3002N全站儀和控制點目標觀測與坐標換算軟件系統(tǒng)對14個附加控制點和副框架上的24個控制點進行目標觀測測量,并將坐標值轉換到主框架坐標系中,具體測量的結果如表2和表3所示。
2.5 運動目標的錄像掃描跟蹤拍攝
首先,左、右側攝像機拍攝主標定框架,用以求解直接線性變換法的11個轉換系數(shù)。然后,左、右側攝像機搖頭并變焦拍攝副框架,其目的就是通過影像解析得到的24個控制點的空間坐標與全站儀測量得到空間坐標進行對比分析。最后,讓一名受試者手持二維錄像分析標定L型架由右向左走動,走動距離約10m,在走動的過程中,讓受試者隨意搖動二維錄像分析標定L型架,與此同時左、右側攝像機搖頭并變焦掃描跟蹤拍攝,拍攝頻率為25fps,并確保所拍攝的運動畫面中至少有2個以上的附加控制點可視(圖2)。
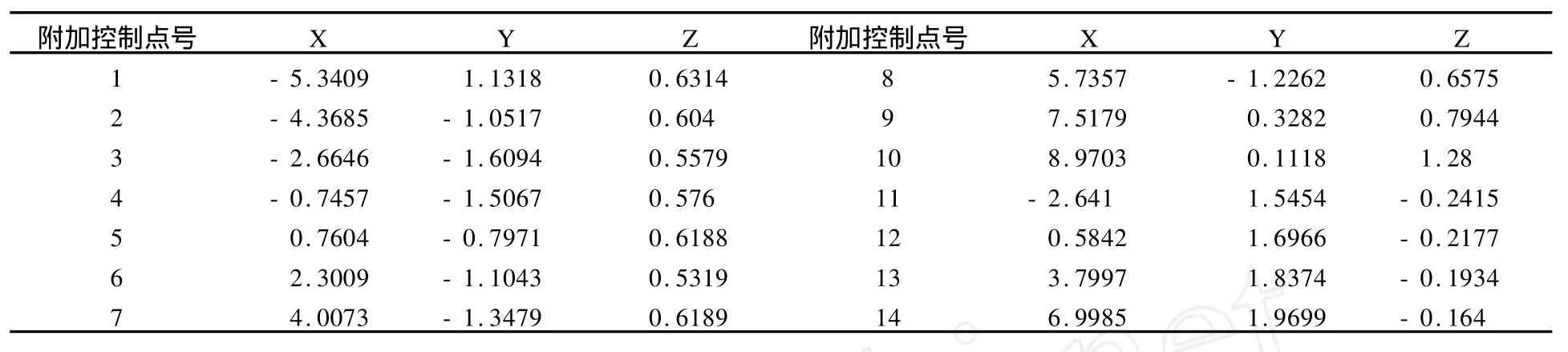
表2 附加控制點在主框架坐標系中的坐標一覽表 (m)

表3 副框架控制點在主框架坐標系中的坐標一覽表 (m)
此拍攝的目的是在運動的條件下,通過三維掃描錄像分析系統(tǒng)解析計算端點L型架兩端點到交點的長度與實際長度(1.2m)進行對比分析。
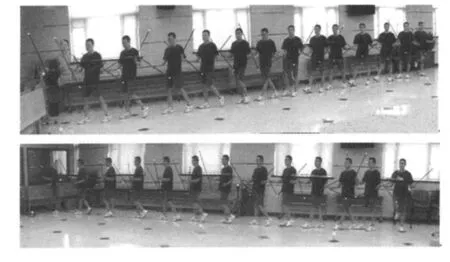
圖2 左、右側攝像機跟蹤掃描拍攝運動畫面截圖
3 運動目標錄像的空間三維實際坐標解算
應用SIMIMotion三維運動錄像分析系統(tǒng)的PTZ功能對視頻圖像的解析與三維定點的圖像解析過程基本一樣,惟一不同點就是在完成對模型所定義的點解析后,還要解析至少2個附加控制點。附加控制點的空間坐標數(shù)值(表2)可以事先輸入到數(shù)據庫中(圖3)。在解析時根據在畫面中出現(xiàn)的實際附加控制點,在數(shù)據庫中進行選擇并解析。左、右攝像機拍攝畫面解析的附加控制點可以相同,也可以不同。
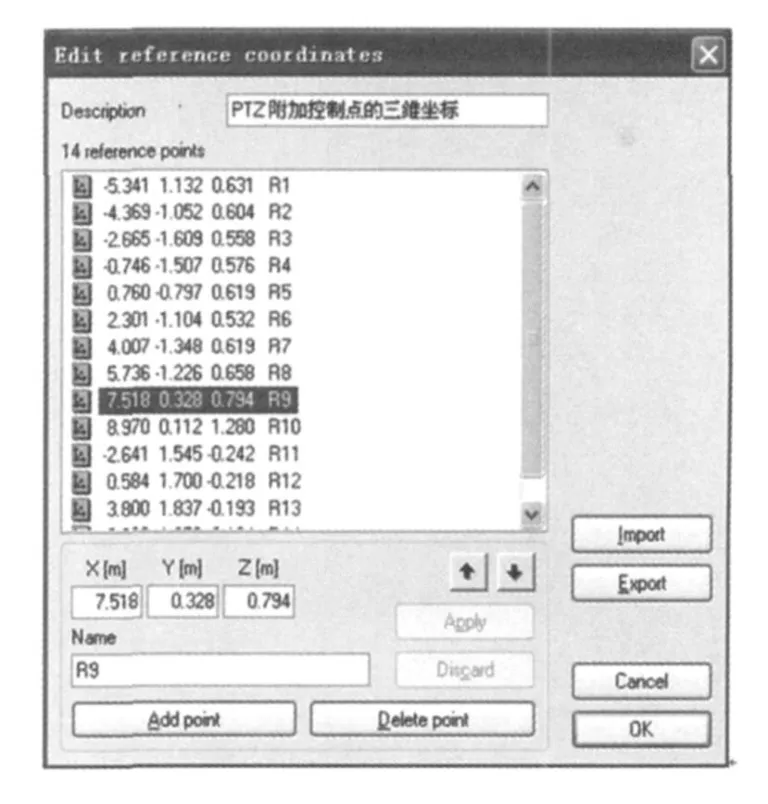
圖3 附加控制點三維坐標輸入界面示意圖
3.1 副框架控制點三維坐標解算
對副框架24個控制點共重復解析11次,在經三維數(shù)據轉換后,24個控制點的三維坐標數(shù)據以原始形式輸出,不做任何數(shù)據平滑處理,副框架控制點三維重構示意圖如圖1所示。
3.2 L型架長度的三維影像分析解算
在SIMI三維運動影像分析系統(tǒng)中將L型架兩端點分別定義為P1和P3,交點定義為P2。對P1、P2和P3進行解析(圖4),共解析962幅運動畫面,L型架在參考坐標系X軸方向上的移動距離約10m。在經三維數(shù)據轉換后,可得到解析點P1、P2和P3的三維空間坐標,并以原始形式輸出,不做任何平滑處理。由解析點P1、P2和P3計算得到的L型架三維重構示意圖如圖3所示。
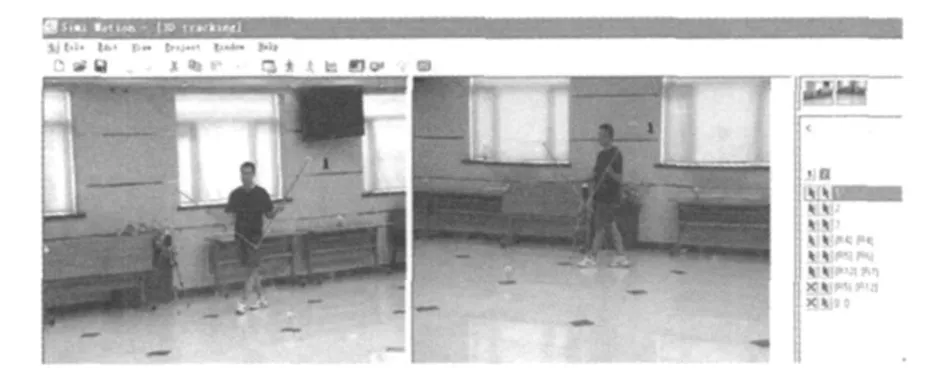
圖4 L型架運動掃描跟蹤錄像解析的界面示意圖
應用影像分析系統(tǒng)所提供的空間兩點間距離的計算功能可得到P1到P2、P2到P3的實際空間距離,即兩桿的長度,分別以L12和L23表示。
4 影像測量的精度分析
測量誤差分析分兩個方面來討論。首先,以全站儀測量得到的數(shù)據為基準,并將三維掃描跟蹤影像解析得到的副框架24個控制點的三維空間坐標與其比較,以驗證三維掃描跟蹤影像分析系統(tǒng)的可靠性和數(shù)據的準確性;然后,對在移動距離約10m的L型架經三維掃描跟蹤影像解析得到的L12和L23測量數(shù)值與實際的真值1.2m進行比較分析,以驗證在動態(tài)的條件下三維掃描跟蹤影像系統(tǒng)測量數(shù)據的精度。
4.1 空間絕對坐標誤差分析
表4是影像解析得到的副框架控制點三維空間坐標的數(shù)據,從各控制點的標準差來看,解析的重復性是比較好的。由于副框架控制點三維空間坐標的真值是不可能測量得到的,這里假定,通過全站儀測量得到副框架控制點三維空間坐標更接近實際的真值,并以此作為判斷影像分析得到的副框架控制點三維空間坐標數(shù)據精度的基礎。表5給出的是影像分析和全站儀(表3)測量得到的控制點三維坐標數(shù)據的差值。
△XYZ表示通過兩種測量方法得到的控制點(球)中心點坐標的空間距離。由表5可知,24個控制點的△XYZ平均值為0.0179m,標準差為0.0028m,最大值為0.0238m(S點),最小值為0.0109m(Q點)。根據表2可計算得到副框架24個控制點到左攝像機的空間距離在8.11~9.54m之間,到右攝像機的空間距離在11.04~12.68m之間,從拍攝距離的角度來分析,攝影測量的偏差△XYZ是很小的。

表4 影像解析得到的副框架控制點的三維空間坐標一覽表 (n=11,m)
4.2 空間動態(tài)相對誤差分析
圖5是影像分析得到的L12和L23的長度測量數(shù)據,由于L12和L23的實際長度已知為1.2m,所以,可以對影像動態(tài)分析的誤差進行分析。表6是L12和L23的長度數(shù)據誤差。L12和L23的三維影像測量長度分別為1.215±0.009m和1.211±0.008m(n=962);誤差平均值分別為0.0154±0.0107和0.0105±0.0081;這說明L23的測量精度要比L12高。圖6也從測量誤差頻次分布方面說明了這一點,圖的橫坐標表示誤差的等距間隔,如5mm表示測量誤差<5mm;10mm表示測量誤差≥5mm并<10mm,以此類推;縱坐標表示在某一誤差范圍內測量誤差所出現(xiàn)的頻次。
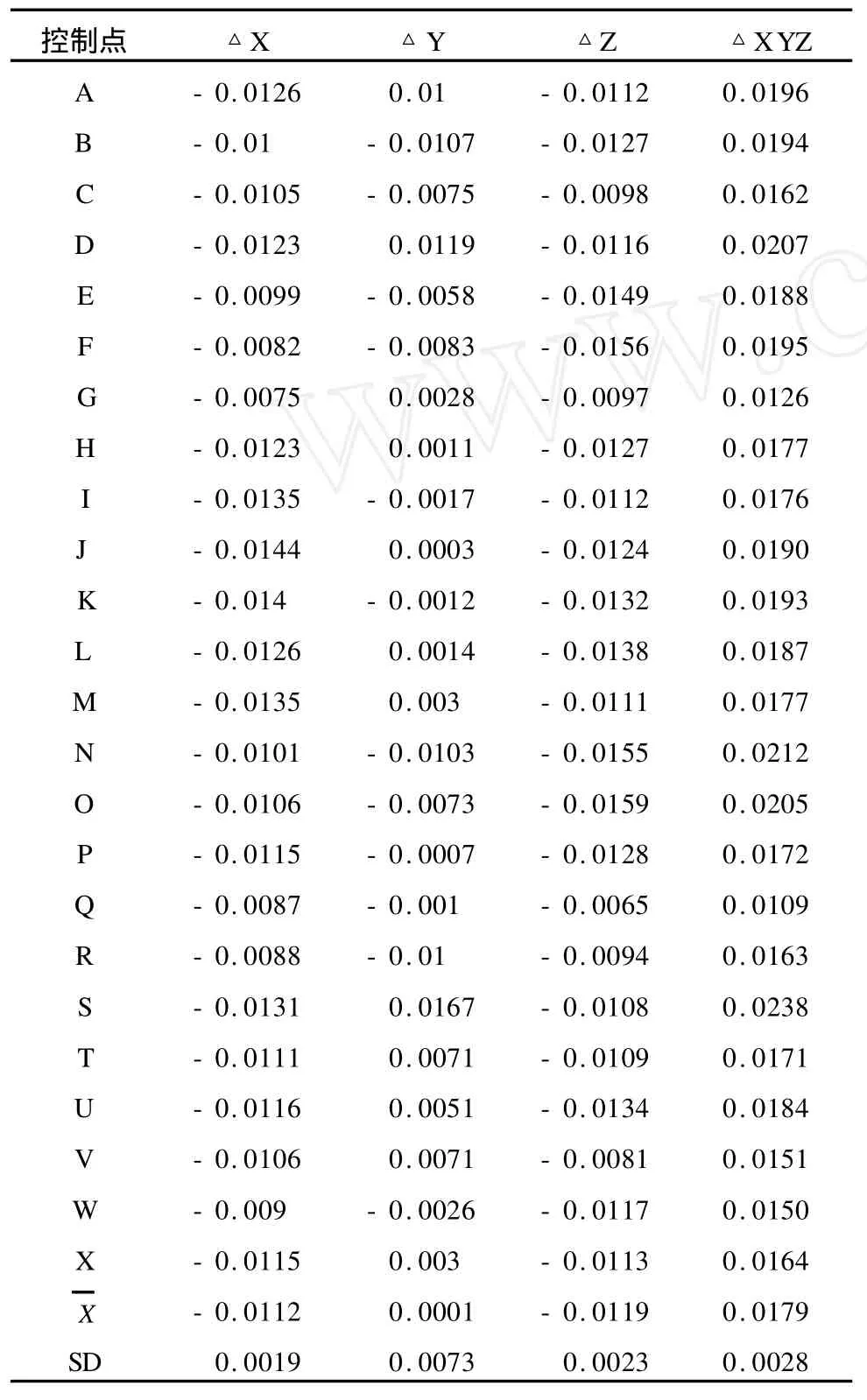
表5 影像分析與全站儀測量得到的控制點三維坐標數(shù)據的差值一覽表 (m)
根據統(tǒng)計學原理[7],L12和L23的誤差平均值加1.64倍標準差的值分別為0.0329m和0.0236m,這表明對于L12和L23的來說,95%測量值的誤差絕對值分別小于0.0329m和0.0236m,其相對誤差分別為2.74%和1.97%,而L23的相對誤差小于2%,由此可知,三維掃描跟蹤影像測量的相對誤差是能夠控制在2%以內,可以滿足運動技術三維影像分析的精度要求。
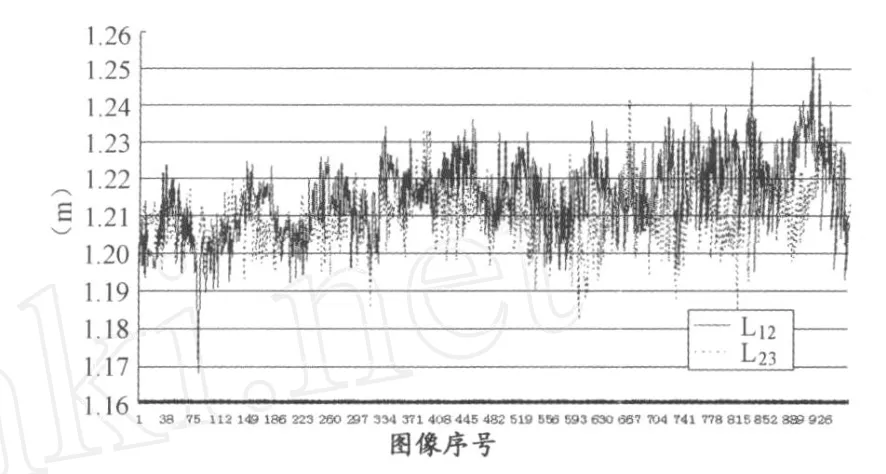
圖5 影像分析得到的L12和L23的長度測量數(shù)據示意圖
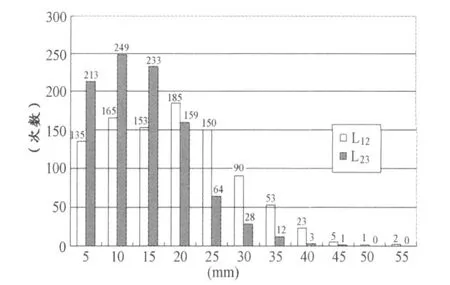
圖6 L12和L23的測量誤差頻次分布示意圖
從圖5可以看到,L12和L23的誤差呈增加的趨勢,那么,是什么原因導致了這樣的結果?筆者注意到,在拍攝錄像的過程中,左側攝像機在跟蹤拍攝L型架的同時鏡頭焦距變焦,以保持L型架在畫面中的大小,而右側攝像機則沒有,隨著L型架遠離右側攝像機,L型架在畫面中的成像越來越小。有研究的結果表明,在二維平面攝像的條件下,物體在畫面中所占比例越大,測定坐標的誤差平均值越小[5]。

表6 L12和L23的長度數(shù)據誤差一覽表 (n=962)
為了驗證三維跟蹤掃描攝影測量過程中,左、右攝像機拍攝的L型架成像大小與L12和L23的測量誤差的關系,從SIM IMotion三維影像分析系統(tǒng)分別輸出左、右攝像機P1、P2和P3解析點的像坐標數(shù)據P′1(x1i,y1i),P′2(x2i,y2i)和P′3(x3i,y3i),i=1,2,3…,962,根據公式:

可計算出由P′1,P′2和P′3點所構成的三角形的面積,并以此作為成像大小的參數(shù)指標。對于左、右側攝像機此參數(shù)分別以AL和AR來表示.
圖7是左、右側攝像機拍攝的L型架的面積參數(shù)AL和AR的變化趨勢圖,它從數(shù)值上說明了在跟蹤掃描拍攝錄像的過程中左側攝像機基本保持了L型架在畫面中的成像大小,而右側攝像機拍攝的L型架的成像越來越小。
表7是面積參數(shù)與L12和L23的測量誤差的相關系數(shù)表,均為負相關。L12的誤差與面積參數(shù)AR的相關系數(shù)為-0.522,P<0.001相關具有高度顯著性。這說明L12的誤差的一個主要的來源是右側攝像機拍攝的成像較小引起的。這從一個側面提示,在進行掃描跟蹤攝影測量時,要盡量使得所拍攝物體的成像較大,從而可減小測量誤差,提高數(shù)據的精度。
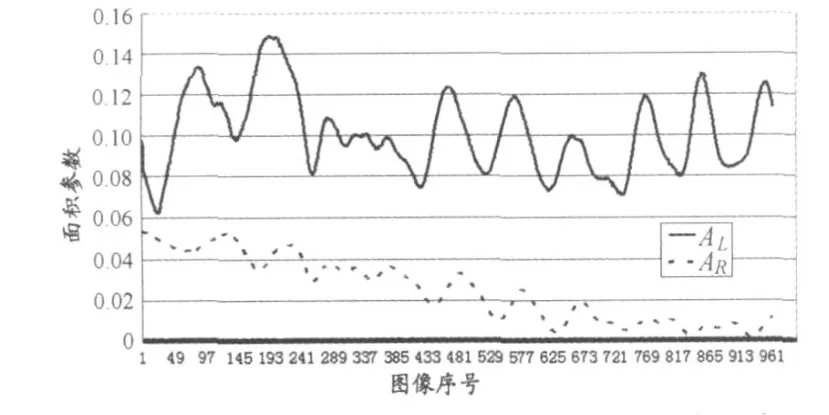
圖7 左、右側攝像機面積參數(shù)AL和AR的變化趨勢示意圖

表7 面積參數(shù)與測量誤差的相關系數(shù)一覽表 (n=962)
4.3 提高攝影測量精度的途徑
測量誤差主要是由系統(tǒng)誤差和隨機誤差所構成。對于三維跟蹤掃描攝影測量來說,系統(tǒng)誤差主要由成像系統(tǒng)的分辨力、成像系統(tǒng)的幾何畸變和處理算法的精度所決定的[4];隨機誤差主要是由對控制點的全站儀的觀測測量、掃描跟蹤錄像的拍攝方法和對運動圖像解析的人員操作導致的。控制或減小測量誤差可從以下幾方面來考慮:
4.3.1 提高成像系統(tǒng)的分辨力
運動生物力學的三維運動錄像拍攝大都采用普通DV數(shù)碼攝像機,它的PAL制標準數(shù)字圖像的分辨率是720像素×576像素。目前市場上已有全高清的數(shù)碼攝像機,它的分辨率可達1 920像素×1 080像素,采用這樣的攝像機拍攝運動的圖像可極大提高成像系統(tǒng)的分辨力。
4.3.2 控制成像系統(tǒng)的幾何畸變誤差
成像系統(tǒng)的幾何畸變誤差主要是指成像系統(tǒng)不能使圖像與實際景物在全場嚴格滿足針孔成像模型(或中心投影關系),使中心投影射線發(fā)生彎曲。一般來說,圖像中心附近的幾何畸變要比圖像邊緣小,所以,在拍攝運動圖像時,應盡可能地將被拍攝物體置于畫面的中心。與三維定點影像分析不同,由于三維跟蹤掃描攝影測量的攝像機可以跟蹤運動目標拍攝錄像,所以,能夠保證將運動物體拍攝到畫面的中心附近。
4.3.3 重復觀測測量,減少人為誤差
對于掃描跟蹤影像三維測量來說,附加控制點的準確度對于解析分析系統(tǒng)的數(shù)據轉換精度有著重要的影響,而附近控制點的測量是由全站儀來完成的,不可避免地會產生人為的觀測誤差。在時間允許的情況下,對附加控制點的測量應重復觀測多次,取平均值,這樣可以盡量的減小人為觀測所產生的誤差。
4.3.4 提高錄像拍攝的操作能力
由上面的討論可知,運動錄像的拍攝在兩個方面影響著測量的誤差:一是,物體的拍攝成像是否在圖像的中心附近;二是,在成像要盡可能地大的同時要將至少2個附加的控制點拍攝到畫面中。這就要求在三維掃描跟蹤影像拍攝的過程中,操作人員要熟悉所拍攝運動項目的特點以及附加控制點的分布情況,并對錄像的拍攝有較強的操作能力。這樣就可以盡量地減小在后期的圖像解析過程中由于圖像拍攝所產生的誤差。
5 結論
1.應用全站儀觀測測量和三維掃描跟蹤影像測量兩種測量方法對空間分布的24個點(球)的空間三維坐標進行觀測、解析和計算,數(shù)據對比顯示,兩種測量方法所得結果的平均偏差為0.0179±0.0028m(n=24),說明本研究所應用的三維跟蹤掃描影像分析方法是可靠的。
2.對已知長度的桿的三維跟蹤掃描影像分析結果表明,本方法相對測量誤差可以控制在2%以內,可以滿足運動技術分析的精度要求。
3.跟蹤掃描影像拍攝運動物體的成像大小對三維解析數(shù)據結果的精度有較大的影響,在實際運動圖像跟蹤掃描拍攝過程中要注意運動物體的成像盡可能地大,以提高數(shù)據的測量精度。
[1]艾康偉,何申杰,何偉,等.運動技術大范圍三維運動學分析——以花樣滑冰雙人拋跳動作為例[J].體育科學,2002,22(4):135-137.
[2]艾康偉,貴慧宏,王博偉,等.三維影像分析控制點測量與坐標轉換軟件系統(tǒng)的設計與實現(xiàn)[J].體育科學,2011,31(1):39-41.
[3]陳及治.體育統(tǒng)計[M].北京:人民體育出版社,2002:77.
[4]于起峰.攝像測量學原理與應用研究[M].北京:科學出版社,2009:13-20.
[5]鄭秀瑗.現(xiàn)代運動生物力學[M].北京:國防工業(yè)出版社,2002:30.
[6]CH RASCHNER.Dynamic and Kinematic Analysisi of the Giant-Slalom Technique of Top Ski Racers[M].SPECTRUM Suppl,1999.
[7]DRENK VOLKER.Bildmeβverfahren für schwenk-und neigbare sow ie in der rennweite variierbare Kameras[J].Schriftenreihe zur Angewandten Trainingswissenschaft,1994,(1):130-142.
[8]DAN IEL REYHER.3D kinemetrische Bewegungsanalyse im Kanurennsport für die Bootsgattung Einercanadier[M].Diplomarbeit,Leipzig,2007.
[9]MARTIN MOESSNER,PETER KAPS,WERNER NACHBAUER.A method for obtaining 3-D data in Alpine skiing using pan-and-tilt cameras with zoom lenses[EB/OL].http://sport1.uibk.ac.at/mm/DLT/dlt.ps.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年18期)2018-11-14 01:48:24
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06