基于主元分析神經網絡補償的 感應電動機逆解耦控制
2011-02-19 12:21:42巫慶輝倫淑嫻常曉恒尹作友
電工技術學報 2011年1期
關鍵詞:系統
巫慶輝 倫淑嫻 常曉恒 尹作友
(渤海大學信息科學與工程學院 錦州 121003)
1 引言
隨著微電子技術和電力電子技術的高速發展,交流調速已廣泛應用于可變速驅動系統,并具有取代直流調速的趨勢[1]。近年來,異步電動機的各種解耦控制方法得到廣泛的研究,如基于轉子磁鏈定向的矢量控制、基于定子磁鏈定向的直接轉矩控制、基于微分幾何的解耦控制理論、基于非線性自抗擾控制器解耦控制[2]等。矢量控制的解耦思想在保證轉子磁鏈幅值為常數的情況下,將感應電動機解耦成獨立的轉子磁鏈回路與轉矩回路,僅實現靜態解耦而無法實現動態解耦[3],同時還具有如下的局限性:①轉子磁鏈定向困難;②復雜坐標變換;③對參數變化敏感;④以電流作控制量,適合于電流源型逆變器供電系統,對于電壓源型逆變器供電系統,需要電流控制環節。直接轉矩控制的解耦思想是依據定子磁鏈空間位置信息綜合定子磁鏈、電磁轉矩的滯環比較器邏輯信號來直接選擇逆變器的開關狀態。直接轉矩控制結構簡單、快速性好、魯棒性強等優點,然而又帶來轉矩與磁鏈脈動大、電流畸變、無法結合先進控制理論等問題[4-5]。
基于逆系統的解耦控制方法是利用非線性狀態反饋來實現多變量、非線性、強耦合系統的解耦與線性化的,具有直觀、簡便和易于理解等特點。目前,在轉子磁鏈與電磁轉矩、轉子磁鏈與轉速、定子磁鏈與電磁轉矩之間的動態解耦方面,基于逆系統的解耦控制方法得到了深入的研究與應 用[6-12]。然而電動機在重載條件下運行時,由于繞組的溫升及電流頻率引起的集膚效應,定轉子電阻的變化量可以達到初始值的50%[13]。電動機定子、轉子電阻參數變化給逆系統方法的解析實現帶來困難[14]。
本文首先分析與建立了感應電動機的α 階積分逆模型,在分析非線性狀態反饋的誤差對其逆模型精度的影響基礎上,提出了一個基于主元分析神經網絡補償的感應電動機逆解耦控制方法,將補償后的α 階積分逆模型級聯到對象的輸入端使復雜的感應電動機調速系統解耦成兩個獨立回路,然后利用線性系統理論分別對獨立回路進行綜合設計,最后實驗驗證了該方案的有效性。
2 感應電動機的逆模型
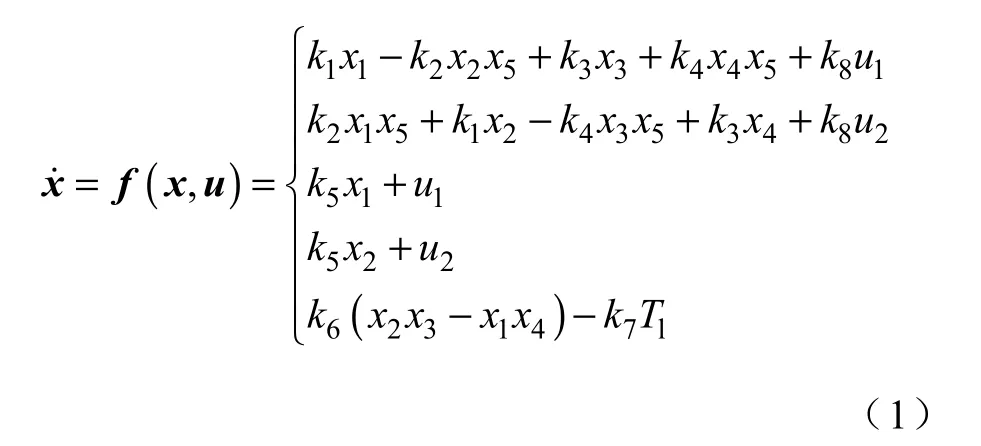
以定子電流矢量與定子磁鏈矢量的d、q 軸分量及轉速為狀態變量,即x=(isdisqysdysqωr)T;以定子電壓矢量d、q 軸分量為輸入變量,即u=(usdusq)T;以電磁轉矩與定子磁鏈模為輸出變量,即y=(T φ)T;則感應電動機在靜止坐標系下的狀態方程為[15]
系統的輸出方程

式中,k1=?(Rs+RrLs/Lr)/(σLs),k2=np,k3=Rr/(σLsLr),k4=np/(σLs),k5=?Rs,k6=1.5np/J,k7=1/J,k8=1/(σLs),k9=1.5np
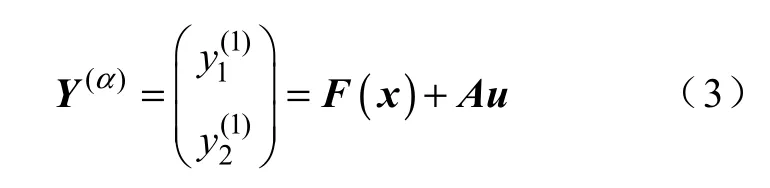
由系統的輸出方程(2)可知,輸出量與控制量之間不是顯示關系,但是借助狀態方程(1)具有隱含關系。為了得到輸出量與控制量的顯示關系,各輸出量分別對時間求導,直到得到輸出量與控制量之間的顯示關系為止,即[16]
式中
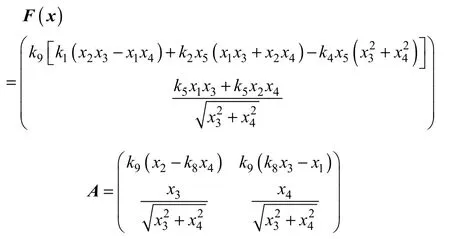
系統的相對階(α1α2)=(1 1),且相對階的總和小于該系統的階次,同時在正則點的某臨域內滿足
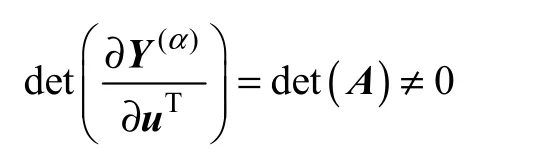
由逆系統存在定理[14]可判斷感應電動機調速系統是可逆的。當矩陣A 非奇異時,由式(4)解得控制量的唯一解為


3 α-階積分逆模型補償方法
在不考慮狀態變量的觀測誤差情況下,由式(6)可知,逆模型的精度由非線性狀態反饋函數F 決定。感應電動機從起動到穩態運行,溫升、集膚效應使得定子電阻、轉子電阻參數值變化較大,甚至達到其標稱值的兩倍左右。解析表達式的狀態反饋函數過分依賴于電動機參數,實際應用中實現相當困難。神經網絡具有:任意精度逼近任意復雜的靜態非線性函數;學習并適應未知或不確定的系統;采用并行處理方法,使得快速進行大量運算成為可能;所有定量或定性的信息均勻地分布存儲于網絡內的各神經元,有強魯棒性和容錯性等優點。本文將非線性狀態反饋的解析方法與具有對未知非線性系統逼近能力的神經網絡方法結合,構造適合工程應用的基于神經網絡補償的逆模型,具有如下形式:

4 基于神經網絡逆復合控制器的設計
基于神經網絡補償的逆系統與被控對象復合成一個偽線性子系統。為了獲得優良的靜、動態特性與抗干擾能力,在此基礎上,設計了復合控制器,如圖1 所示,包括基于神經網絡補償的解耦控制器與附加PID 控制器兩部分。
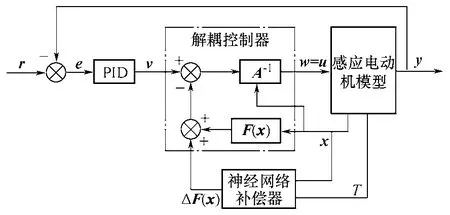
圖1 復合控制系統框圖 Fig.1 Block diagram of compound control system
4.1 神經網絡補償器[17]
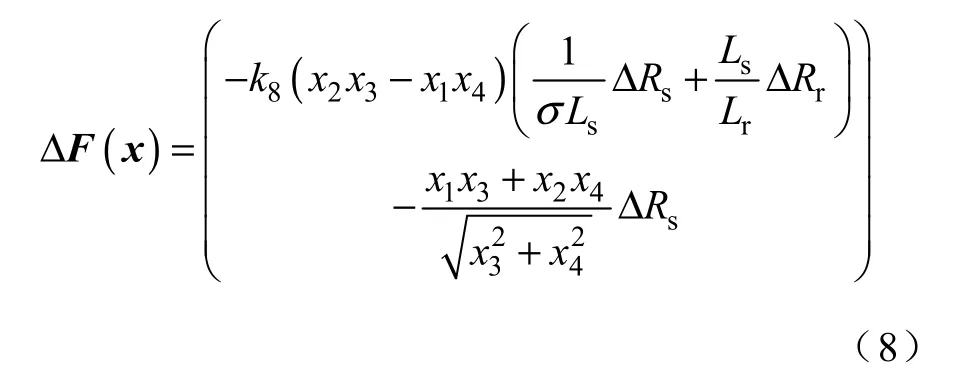
由于定、轉子參數是繞組溫升的函數,由式(8)可知,逆解耦的補償量是一個關于系統狀態及繞組溫度的多變量、強耦合與非線性映射關系,同時又受運行工況等復雜因素的影響。BP 神經網絡具有自學習、自適應和較強的容錯性,非常適合于該研究的問題,因此,設計了基于BP 神經網絡的逆解耦補償器。又由于輸入變量較多、訓練樣本很大,這樣造成神經網絡訓練時間相當長,效率低,泛化能力差。而主元分析法(PCA)對網絡的輸入進行線性組合,降低輸入量維數,正好解決這個問題。
4.1.1 主元分析法
主元分析法的基本思路是:通過線性坐標變換,用較少的互不相關的變量代替原變量,同時保留原始數據的特征信息。PCA 實質上是過程操作變量協方差的特征矢量分解,其主要思想如下:
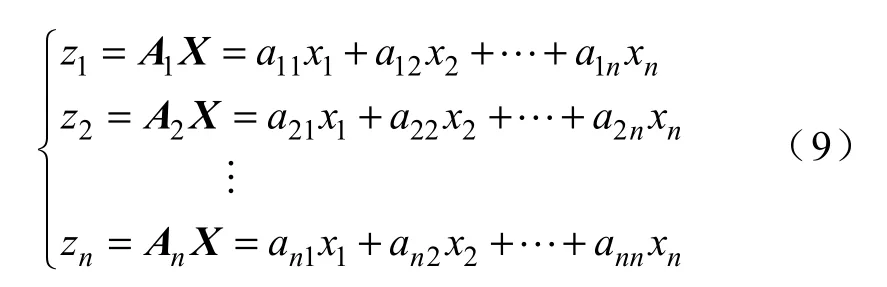
設標準化的數據樣本集X=(x1x2…xn)T,其協方差矩陣為∑,λ1≥λ2≥…≥λn≥0 為∑的n 個非負特征根,與λi對應的單位特征矢量為 Ai=(ai1ai2… ain)T,i=1,…,n。由n 個特征矢量組成的新變量如下:
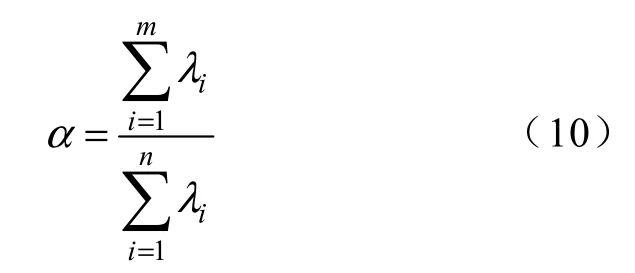
選擇前m 個變量為z1,z2,…,zm(m<n)作為主元分量,使其方差占總方差的比例為(約0.85~
0.9 )
4.1.2 基于PCA 的BP 神經網絡結構
數據樣本有6 個輸入變量與兩個輸出變量,其中輸入變量分別為定子電流矢量的d 軸分量與q 軸分量、定子磁鏈的d 軸分量與q 軸分量、轉速以及電機溫度;輸出變量分別為兩個補償分量。首先利用Matlab 中的prestd 函數將數據標準化,然后利用主元分析函數prepca 通過指定的占總方差的最小比例將數據樣本轉化成由四個無關的新變量組成。BP神經網絡模型采用4-60-2 結構,基于PCA 的BP 神經網絡結構如圖2 所示。
4.1.3 樣本訓練與驗證
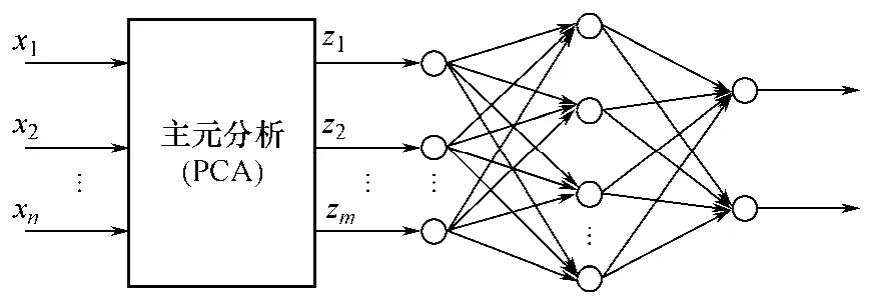
圖2 基于PCA 的神經網絡結構模型 Fig.2 Structural model of PCA based neutral network
數據樣本集共有2000 組數據,其中1500 組數據用于訓練神經網絡,其余500 組數據用于驗證神經網絡。本神經網絡的訓練參數為:終止誤差為0, 最大訓練步數為20,隱層與輸出層的作用函數分別為“tansig”與“purelin”。基于PCA 的神經網絡經過 20 次的訓練步數時,網絡的誤差精度達到1.5×10?5。把訓練數據之外的500 組驗證數據輸入到已訓練好的神經網絡,得到如圖3 所示的結果。
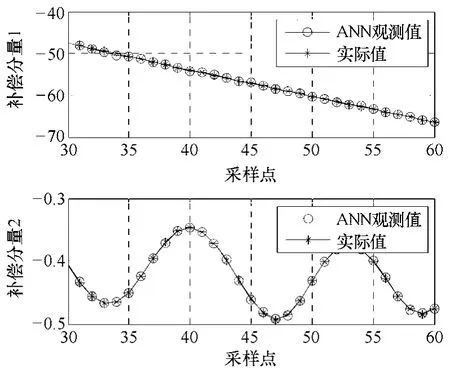
圖3 BP 神經網絡輸出與實際輸出曲線 Fig.3 Curves of real output and PCA neutral network output
仿真結果可以看出,網絡經過訓練學習后,實際輸出與模型輸出基本相符,能夠對逆解耦進行精確補償。
4.2 PID 調節器
由于轉矩子系統與磁鏈子系統均為一階積分型線性系統,TA 和FA 均選為PI 調節器,其傳遞函數分別為
5 仿真與實驗研究
按照圖1 所示的控制結構對一個標準4kW、4-極的籠型感應電動機進行了實驗對比研究。電動機參數如下:Rs=1.1Ω,Rr=1.05Ω,Ls=0.12H,Lr=0.12H,Lm=0.115H。
5.1 未補償的解耦控制系統仿真結果
5.1.1 驗證電磁轉矩對定子磁鏈的動態耦合影響
電磁轉矩與定子磁鏈幅值在初始時刻分別設定為10N·m 和0.4Wb,在3s 時刻電磁轉矩給定值突變為20N·m,而定子磁鏈給定值保持不變,逆系統未采用補償(也就是圖1 中的ΔF(x)=0),電磁轉矩與定子磁鏈響應曲線如圖4 所示。
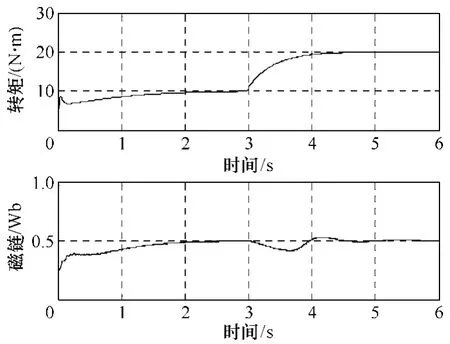
圖4 電磁轉矩對定子磁鏈的耦合影響 Fig.4 Coupling influence of electromagnetic torque versus stator flux linkage
5.1.2 驗證定子磁鏈對電磁轉矩的動態耦合影響
電磁轉矩與定子磁鏈幅值在初始時刻分別設定為10N·m 和0.5Wb,在3s 時刻定子磁鏈幅值給定值突變為1Wb,而電磁轉矩給定值保持不變,逆系統未采用補償(也就是圖1 中的ΔF(x)=0),電磁轉矩與定子磁鏈響應曲線如圖5 所示。
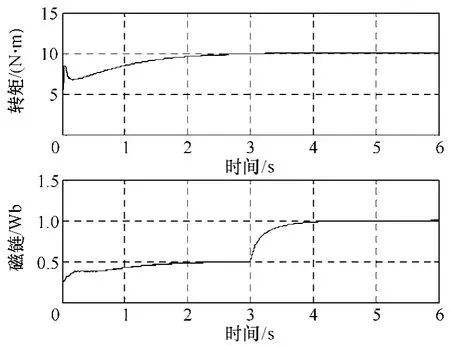
圖5 定子磁鏈對電磁轉矩的耦合影響 Fig.5 Coupling influence of stator flux linkage versus electromagnetic torque
5.2 基于神經網絡補償的解耦控制系統仿真結果
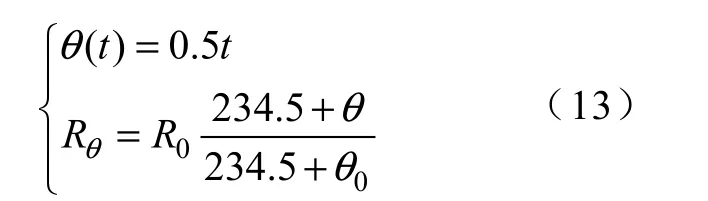
逆解耦控制系統采用建議的基于PCA-BP 神經網絡補償方案,并設定電動機的溫度與時間的函數關系及定、轉子電阻隨溫度變化關系為
電磁轉矩與定子磁鏈響應曲線如圖6、圖7 所示,從仿真實驗結果可以看出,定轉子電阻隨溫升變化時,基于PCA-BP 神經網絡的補償器得到了精確補償,實現了定子磁鏈與電磁轉矩完全解耦。
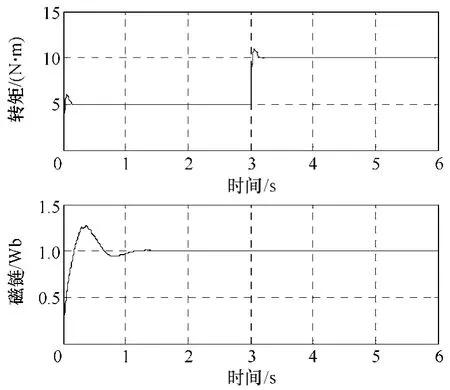
圖6 基于補償方案的電磁轉矩對定子磁鏈耦合影響 Fig.6 Coupling influence of electromagnetic torque versus stator flux linkage based on the proposed scheme
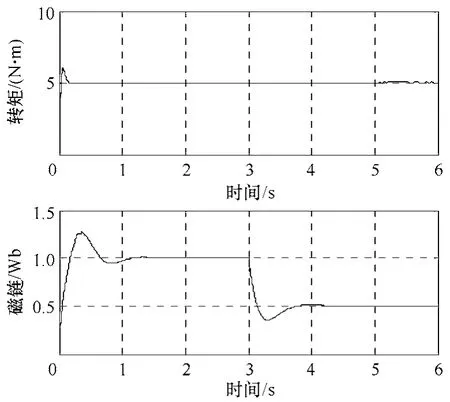
圖7 基于補償方案的定子磁鏈對電磁轉矩耦合影響 Fig.7 Coupling influence of stator flux linkage versus electromagnetic torque based on the proposed scheme
5.3 基于神經網絡補償的解耦控制系統實驗結果
本文提出的基于神經網絡補償的解耦控制在EL-DSPMCK-Ⅱ型DSP 電機控制實驗開發平臺上進行了實驗驗證。初始時刻,電磁轉矩與電子磁鏈的給定值分別設定為2N·m、0.5Wb,電機空載起動,待平穩運行3s 后,電磁轉矩給定值突變為5N·m,運行6s 后定子磁鏈給定值突變為1Wb,實驗結果如圖8 所示。從實驗結果可以看出,所提方案實現了定子磁鏈與電磁轉矩的解耦控制。
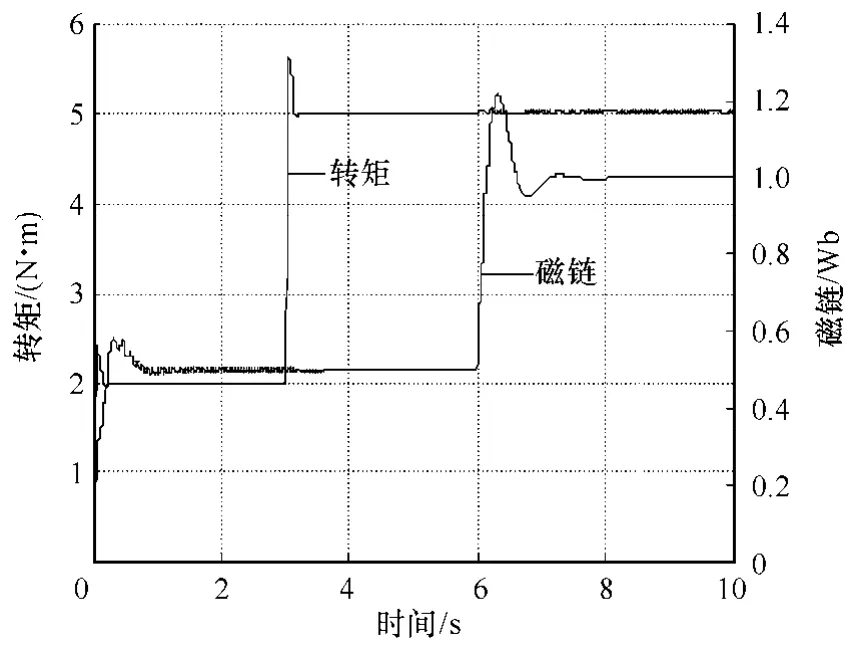
圖8 基于神經網絡補償的解耦控制實驗曲線 Fig.8 Experimental curves of PCA neutral network compensation based decoupling control
6 結論
本文針對感應電動機驅動系統提出了基于主元分析神經網絡逆解耦控制的方法,通過理論分析與實驗驗證得到如下結論:
(1)定轉子電阻參數的變化所造成的非線性狀態反饋誤差是影響逆解耦控制精度的主要因素,尤其電磁轉矩對定子磁鏈的耦合作用強。
(2)神經網絡具有自適應、自學習、較強魯棒性和非線性映射能力,適合于感應電動機非線性狀態反饋誤差的補償。
(3)主元分析法對神經網絡輸入數據樣本進行預處理,大大降低了神經網絡輸入維數,大大簡化了神經網絡結構,提高了神經網絡收斂速度與泛化能力。
(4)主元分析法得到的新變量為原變量的加權平均,具有濾波作用,可以大大提高系統的抗干擾能力。
[1] 陳碩,辻峰男,山田英二.感應電機無速度傳感器矢量控制系統的定子電阻在線辨識[J].中國電機工程學報,2003,23(2):88-92.
Chen S,Tsujt M,Yamada E.On-line identification of stator resistance for sensorless vector control system of induction motors[J].Proceedings of the CSEE,2003,23(2):88-92.
[2] 馮光,黃立培,朱東起.采用自抗擾控制器的高性能異步電動機調速系統[J].中國電機工程學報,2001,21(10):55-58.
Feng Guang,Huang Lipei,Zhu Dongqi.High performance control of induction motor based on auto-disturbance rejection controller[J].Proceedings of the CSEE,2001,21(10):55-58.
[3] 孫飛月,張春龍.異步電動機兩種不同解耦控制策略的比較[J].微特電機,2006(11):27-32.
Sun Feiyue,Zhang Chuanlong.Comparative study of two decoupling control methods of induction motor[J].Small & Special Electrical Machines,2006(11):27-32.
[4] 胡虎,李永東.基于區域電壓矢量表的交流異步電動機直接轉矩預測控制策略研究[J].電工技術學報,2004,19(2):25-30,46.
Hu Hu,Li Yongdong.A predictive direct torque control strategies of induction motor based on area voltage vector table[J].Transactions of China Electrotechnical Society,2004,19(2):25-30,46.
[5] 程善美,付中奇.基于自適應轉速辨識的直接轉矩控制系統研究[J].電力電子技術,2007,41(9):24-25.
Cheng Shanmei,Fu Zhongqi.Research of direct torque control system based on adaptive speed identi- fication[J].Power Electronics,2007,41(9):24-25.
[6] Kawabata Y,Kawakami T,Sasakura Y,et al.New design method of decoupling control system for vector controlled induction motor[J].IEEE Trans- actions on Power Electronics,2004,19(S):1-9.
[7] 孫東升.基于線性化反饋的異步電動機自適應解耦控制[J].電機與控制應用,2006,33(3):7-11.
Sun Dongsheng.Self-adaptive decoupling control for induction motor based on linearization feedback[J].Electric Machines & Control Application,2006,33(3):7-11.
[8] 曹建榮,虞烈,魏澤國,等.基于逆系統理論的感應電動機解耦控制的研究[J].電工技術學報,1999,14(1):7-11.
Cao Jianrong,Yu Lie,Wei Zeguo,et al.Inverse system-based decoupling control of induction motor[J].Transactions of China Electrotechnical Society,1999,14(1):7-11.
[9] Boton C,Horga V,Albu M,et al.Decoupling control of an induction motor drive supplied by a voltage source inverter[C].International Symposium on Signals,Circuits and Systems,2007,2:1-4.
[10] Wang H,Xu W,Shen T,et al.Stator flux and torque decoupling control for induction motors with resistance adaptation[J].IEE Proceedings on Control Theory and Applications,2005,152(4):363-370.
[11] 李擎,楊立永,李正熙,等.異步電動機定子磁鏈與電磁轉矩的逆系統解耦控制方法[J].中國電機工程學報,2006,26(6):146-150.
Li Qing,Yang Liyong,Li Zhengxi,et al.Stator flux and torque decoupling control of induction motor using inverse system method[J].Proceedings of the CSEE,2006,26(6):146-150.
[12] 楊立永,李正熙,李華德,等.感應電動機調速系統的自適應逆控制[J].控制理論與應用,2007,24(1):95-98.
Yang Liyong,Li Zhengxi,Li Huade,et al.Adaptive inverse control of induction motor drive system[J].Control Theory & Applications,2007,24(1):95-98.
[13] Marino R,Peresada S,Tomer P.On-line stator and rotor resistance estimation for induction motors [C].IEEE Trans.on Contr.Syst.Technol.,2000,8:570-579.
[14] 戴先中.多變量非線性系統的神經網絡逆控制方 法[M].北京:科學出版社,2005.
[15] 巫慶輝.感應電動機定子磁鏈與轉矩的逆解耦及存在性[J].控制理論與應用,2009,26(9):983- 987.
Wu Qinghui.The inverse decoupling control for the stator flux and torque in induction motors and its existence[J].Control Theory & Applications,2009,26(9):983-987.
[16] 巫慶輝,倫淑嫻.基于定轉子電阻誤差補償的感應電動機自適應逆解耦控制研究[J].自動化學報,2010,36(2):297-303.
Wu Qinghui,Lun Shuxian.Research on adaptive inverse decoupling control of induction motor based on stator and rotor resistance error compensation[J].Acta Automatica Sinica,2010,36(2):297-303.
[17] Wu Qinghui,Chang Xiaoheng,Lun Shuxian,et al.PCA-BP neutral network design for inverse decoupling compensator of induction motor drives[C].2010CCDC,Xuzhou,China,2010.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
