無速度變頻控制系統在礦山機械傳動中的應用
2011-01-23 01:35:28謝錦秋董麗麗
中國礦業 2011年1期
謝錦秋,董麗麗
(河北聯合大學,河北 唐山 063000)
1 概述
目前,我國礦山機械傳動調速控制多數采用V/F控制,在高轉矩,高精度的工況下不能滿足調速控制要求。為了達到高精度的轉速閉環控制及磁場定向的需要,在電機軸上安裝了速度傳感器。但是有許多場合不允許外裝任何速度和位置檢測元件,此外安裝速度傳感器一定程度上降低了調速系統的可靠性。隨著交流調速系統的發展和實際應用的需要,國內外許多學者和科技人員展開了無速度傳感器的交流調速系統研究,成為交流調速技術一個重要的應用研究領域。
本文基于TMS320LF3407的高性能的異步電動機無速度傳感器矢量控制系統,充分利用了DSP的高速運算能力和豐富的片內外設結構、使電機控制度外圍電路簡單,結構緊湊。從試驗結果可以看出,系統采用軟計算代替了速度和位置檢測元件,提高了調速的可靠性。修正的自校正方法,增強了控制系統的魯棒性,改善了系統的動態性能。一定程度上極大的促進了需高精度、高起動轉矩的礦山機械傳動交流調速要求。
2 傳動過程中的速度辨識原理
2.1 速度辨識方法
采用模型參考自適應(MRAS)法進行速度辨識,在靜止坐標系下,將含有真實速度ωr的轉子回路方程視為參考模型,將含有待辨識的速度ωr的轉子回路方程視為可調模型,根據Popov超穩定性定理可得到轉速ωr的辨識結果ωr,ωr與定子電流、參考模型和可調模型的狀態變量ψr,ψr有關.采用模型參考自適應( MRAS)法可以獲得較好的穩定性及較高的控制精度。
自適應的感應電機轉速辨識器設計
記被辨識對象和并聯估計模型如下:
辨識對象
(1)
(2)
并聯估計模型
(3)
(4)

(5)
方程式(1)~(3)是在靜止坐標系中給出的,為便于推導自適應律,假設轉速ωr為常數.由式(2)減去式(4),可得誤差方程如下:
(6)
記
(7)
(8)
自定義律為
(9)
(10)
根據Popov超穩定性定理知道,如果滿足下列條件:
(1)H(s)=D(SI-A)-1為嚴格正實矩陣;

即:模型參考自適應系統是漸近穩定的。可以證明該模型參考自適應系統是漸近穩定的。假設轉子時間常數Tr可以準確獲得,可得轉速ωr的自適應律如下:
(11)
2.2 轉速辨識設計方法
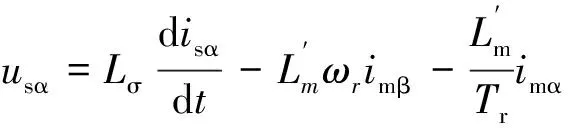
在αβ定子坐標系下,電機模型可由以下方程描述:
(12)
(13)
(14)
(15)
式中,im為勵磁電流矢量;em為定子繞組上的感應電勢。
由式(14)、式(15)可得
(16)
(17)

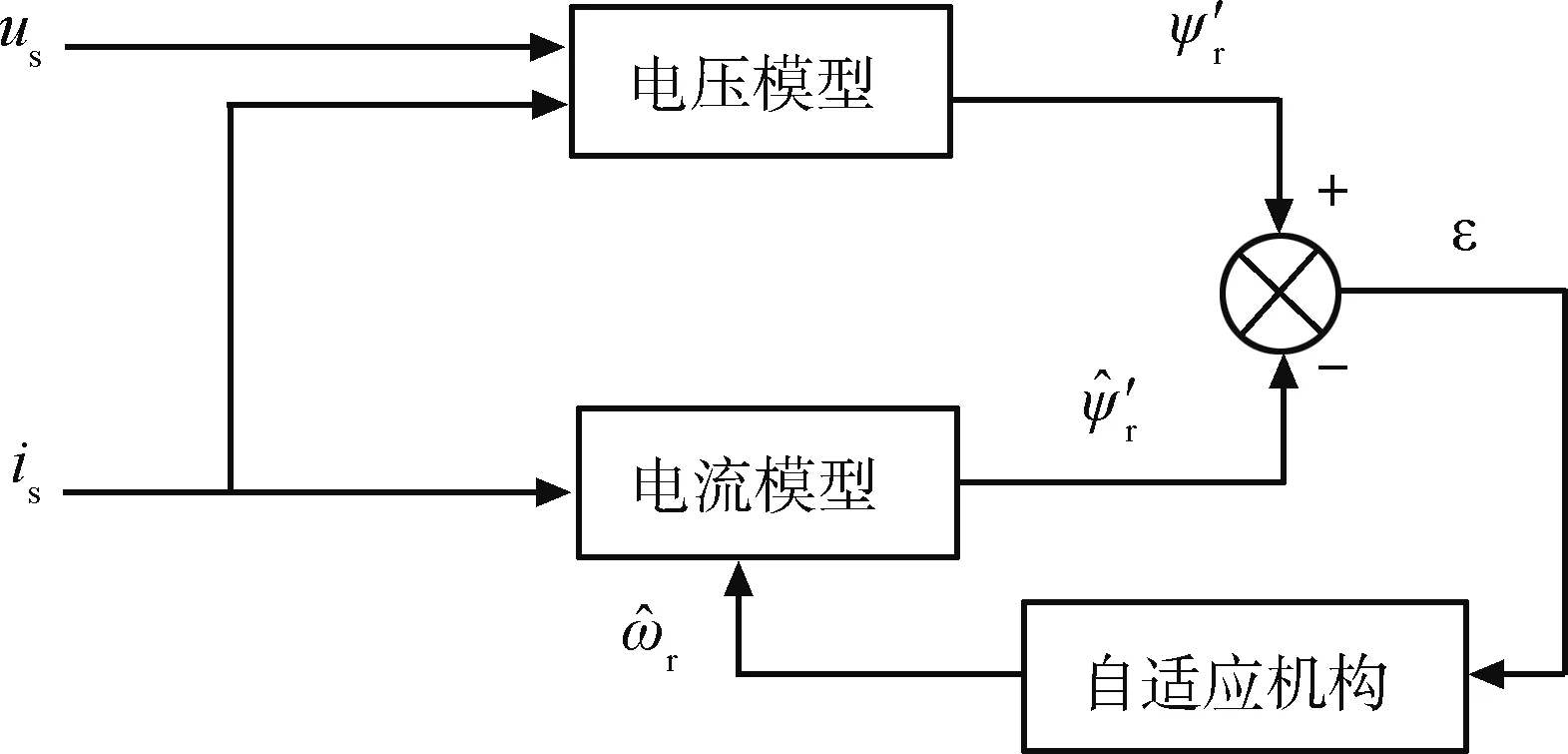
圖1 并聯雙模型轉速觀測器
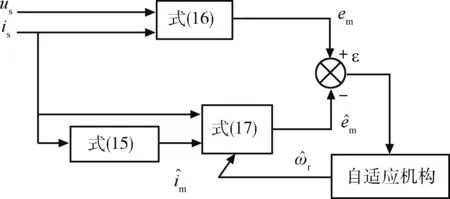
圖2 改進的MRAS速度辨識結構圖
在上述改進的MRAS方案中,由于參考模型中不含純積分環節,系統在低速時可獲得較好的性能.然而定子電阻阻值隨溫升而變化,這將直接影響系統的性能和模型參考自適應速度辨識器的穩定性,所以,如何使系統對定子電阻阻值變化具有低靈敏度便成為進一步改進辨識結構的要求. 圖3給出了改進的新型速度辨識器的結構圖。
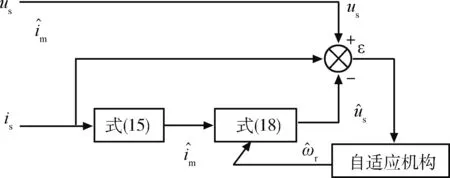
圖3 改進的新型速度辨識器
將式(17)代入式(16)

(18)
3 調速控制系統的設計及技術方案
3.1 TMS320F2407的結構和特點
TMS320 LF2907是TI公司高性價比的DSP器件。它具有相同的16位定點DSP內核和指令集,該指令集源碼向下兼容TMS320C2x系列、向上兼容TMS320C5000系列,具有良好的可移植性。特點如下:
①指令周期33ns,運算能力30MIPS;②獨立
的讀寫數據總線和地址總線,支持并行的程序和雙數據操作數尋址;③支持并行算術邏輯(AIU)運算和乘法運算;④硬件堆棧,加快中斷處理其體系結構圖如圖4所示。
DSP內核的高性能運算能力,使TMS320 LF2407可運行復雜控制算法,如采用高階PID算法進行精密控制,自適應Kalman濾波算法可減小功率損耗,還可以用FFT算法對電機的機械諧振、線性諧波等進行分析。“事件管理器”可輸出PWM脈沖,直接控制電機功率驅動器,此外還包括定時器、比較/捕獲、死區控制邏輯、空間矢量PWM發生器和直接與光電編碼器接口的編碼單元。TMS320LF2407片內外設包括一對A/D轉換器、2個串口、CAN控制器模塊和看門狗定時器及實時中斷定時器。
3.2 調速系統的硬件設計
系統的硬件結構框圖如圖5所示。系統的控制核心是TMS320LF2407,逆變模塊IPM是由富士公司生產的7MBP50-RA120。該智能模塊內含驅動電路、過流保護、斷路保護、過熱保護電路、報警輸出電路、制動電路。整個模塊采用陶瓷絕緣結構,可直接裝在散熱片上。整流模塊采用6RI00G,電流檢測電路由接在逆變橋輸出端的霍爾傳感器電路組成,相電壓檢測電路為霍爾傳感器電路。接口電路主要是指鍵盤和顯示電路以及內存擴展電路。
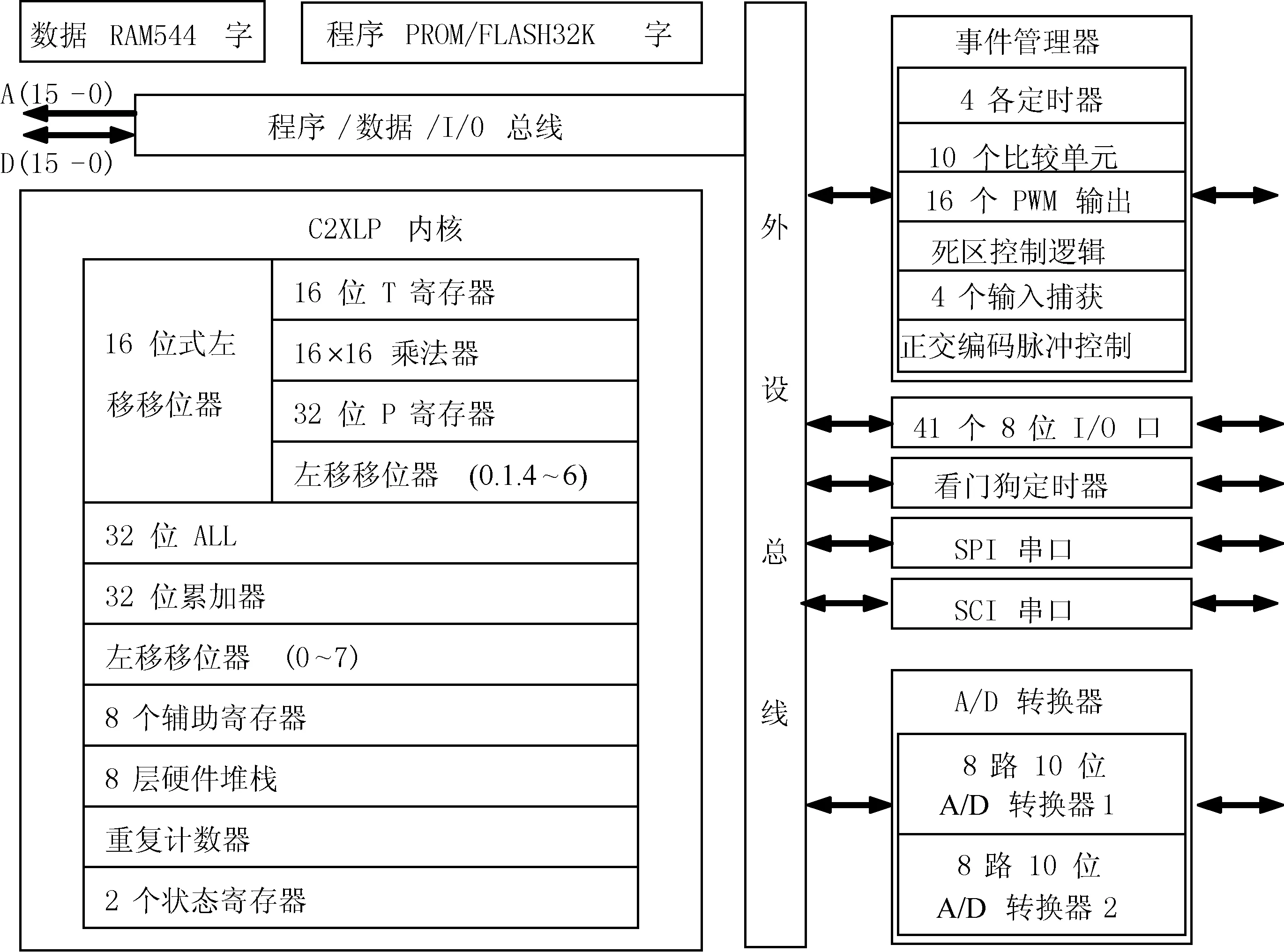
圖4 TMS320LF2407的體系結構
3.3 調速系統的軟件設計
圖6中,初始化程序主要完成DSP硬件及軟件變量的初始化,使能中斷的功能;初始化程序由TMS320LF2407的復位中斷驅動執行DSP的復位中斷是一種不可屏蔽中斷,可由系統上電、片內看門狗定時器溢出、非法地址操作及軟件指令觸發,初始化程序僅在系統復位及程序開始時執行工次。運行程序則包括一個無限循環和一個中斷服務程序,其中中斷服務程序由電流及轉速計算、坐標變換、PWM信號產生及故障保護等多個功能模塊構成。各功能模塊按一定的順序關系,在固定的時間周期內執行,由GPTimerl的下溢中斷來啟動程序的運行(圖7)。
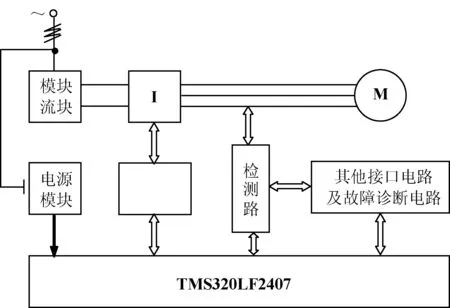
圖5 控制系統的硬件結構
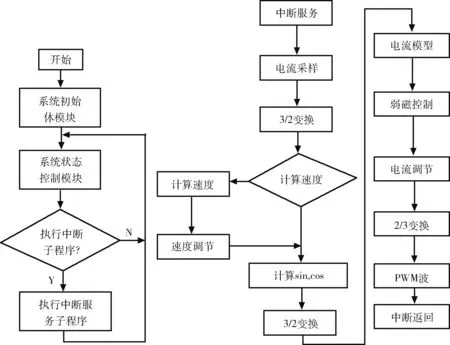
圖6 主程序流程圖 圖7 中斷服務程序
4 傳動系統的仿真與實踐
由圖8知,矢量控制系統由速度調節器,直接轉矩控制部分及逆變器等構成,矢量控制部分主要完成磁鏈滯環比較、轉矩滯環比較、最優開關邏輯選擇、磁鏈、轉速辨識及坐標轉換等功能。
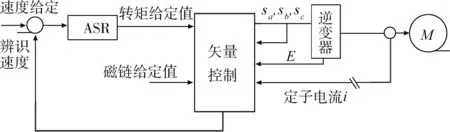
圖8 矢量控制系統的結構框圖
首先對一四極電機進行了運行試驗,其額定功率為10kW,額定電壓為380 V,額定電流為19.7A,額定轉速為1460r/min。
圖 9、圖10分別給出了電機速度與轉矩的仿真曲線。
電動機的調速仿真和運行試驗對理論和計算公式進行了驗證,得到了比較滿意的結果。
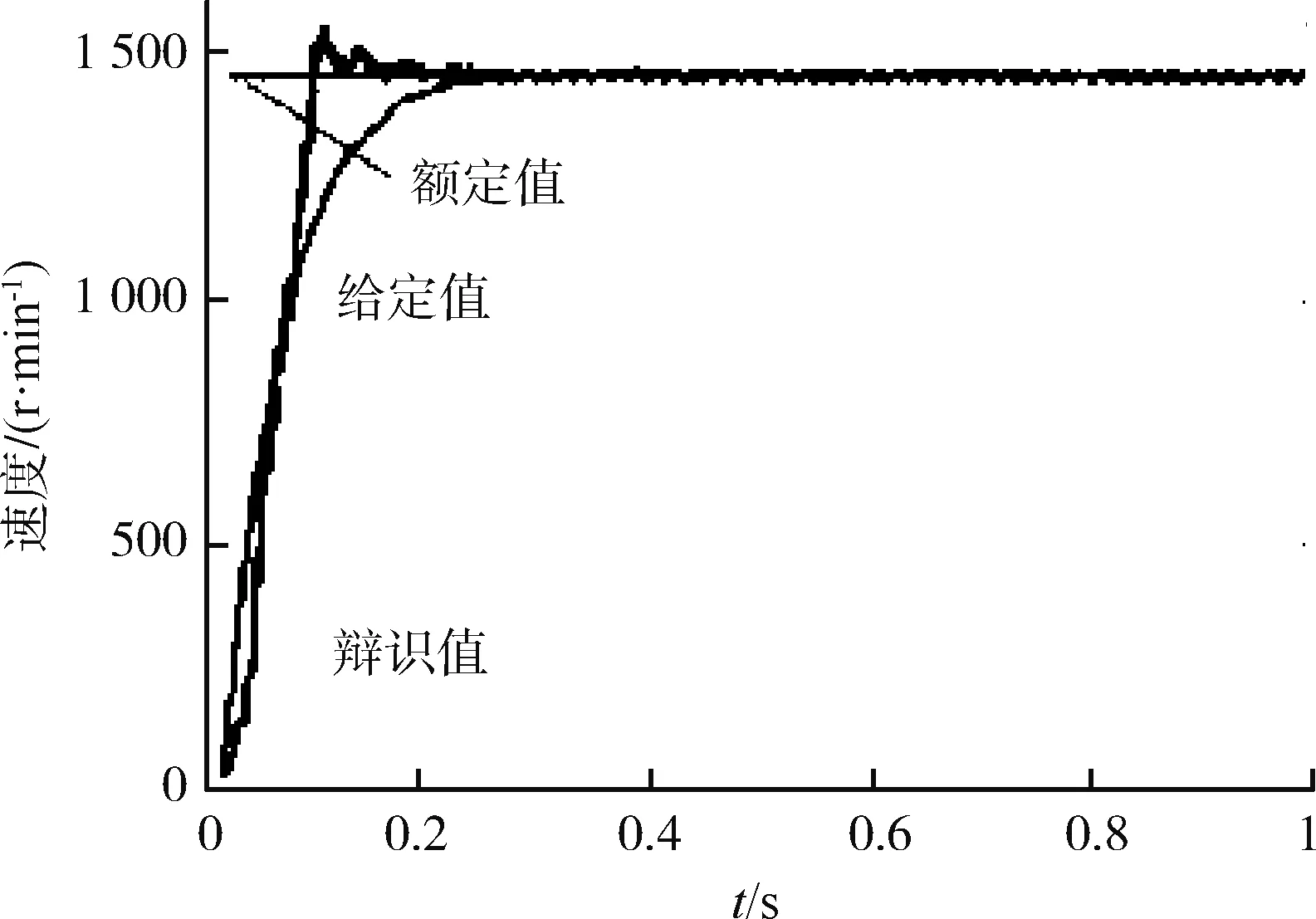
圖9 電機速度給定與仿真曲線
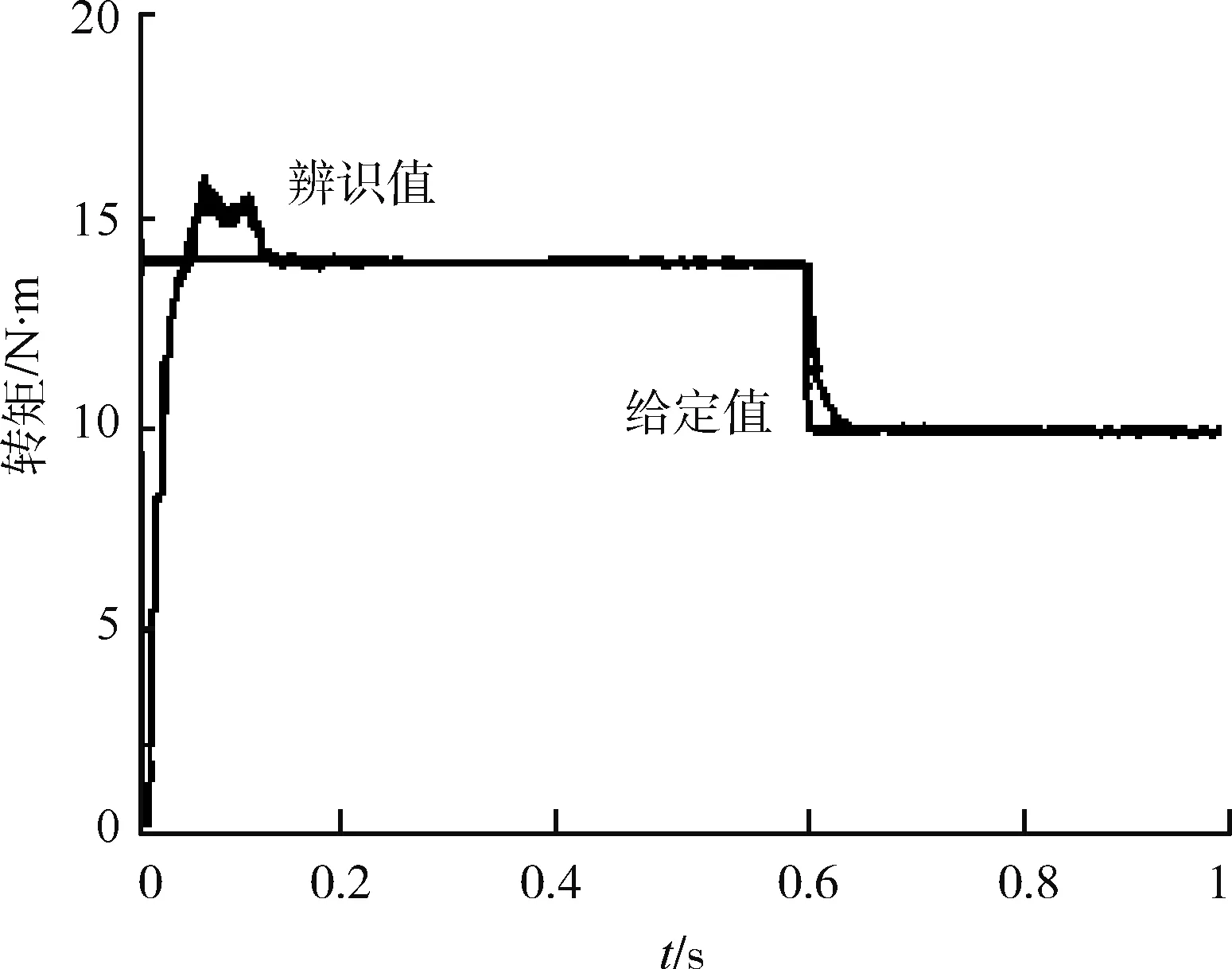
圖10 電機轉矩給定與仿真曲線
5 應用與推廣
基于TMS320LF3407的高性能的異步電動機無速度傳感器矢量控制系統,充分利用了DSP的高速運算能力和豐富的片內外設結構、使電機控制度外圍電路簡單,結構緊湊。從實踐結果可以看出,系統采用軟計算代替了速度和位置檢測元件,提高了調速的可靠性。修正的自校正方法,增強了控制系統的魯棒性,改善了系統的動態性能。使礦山機械傳動控制啟動平穩,運行可靠,調速系統精度高,使交流電動機的控制具有直流電動機的特性,降低調速成本,提高生產效益。
[1] 李忠玉. 新型交流電機 CN2459811[P].
[2] 井浦英昭,野中和浩,等.安川電機交流電動機的無傳感器矢量控制方法及其控制裝置[S].CN1699213 株式會社.
[3] 張航生.一種用于高壓交流電機的磁可控軟啟動裝置[P].CN2836335
[4] 伊維彬,李廣樹.MG400/920WD電牽引采煤機變頻調速系統 [J]. 煤炭科學技術,2002,21(8).
[5] 惠萬里,孫國啟.現場總線控制的變頻器在采煤機中的應用 [J]. 煤炭科學技術,2005,33(5).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
海峽姐妹(2020年8期)2020-08-25 09:30:18
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45