基于給定系統(tǒng)的模糊PID控制
2011-01-22 03:35:36賈秀榮張新政
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2011年2期
賈秀榮,張新政
(廣東工業(yè)大學(xué) 自動(dòng)化學(xué)院,廣東 廣州 510006)
基于給定系統(tǒng)的模糊PID控制
賈秀榮,張新政
(廣東工業(yè)大學(xué) 自動(dòng)化學(xué)院,廣東 廣州 510006)
在借鑒傳統(tǒng)PID控制應(yīng)用于單片機(jī)的方法的基礎(chǔ)上,引進(jìn)了模糊規(guī)則的調(diào)用方式。根據(jù)偏差絕對值和偏差變化絕對值的改變,調(diào)節(jié)PID參數(shù),最后進(jìn)行Matlab仿真。經(jīng)過對沒有加入PID控制、加入傳統(tǒng)PID控制與加入模糊PID動(dòng)態(tài)性能的差異比較,驗(yàn)證被控系統(tǒng)的動(dòng)態(tài)性能得到明顯的改善。
模糊PID;傳統(tǒng) PID;Matlab仿真
傳統(tǒng)PID(比例、積分和微分)控制原理簡單,使用方便,適應(yīng)性強(qiáng),可以廣泛應(yīng)用于各種工業(yè)過程控制領(lǐng)域。但是PID控制器也存在參數(shù)調(diào)節(jié)需要一定過程、最優(yōu)參數(shù)選取比較麻煩的缺點(diǎn)。對一些系統(tǒng)參數(shù)變化的過程,PID控制就無法有效地進(jìn)行在線控制,不能滿足在系統(tǒng)參數(shù)發(fā)生變化時(shí)PID參數(shù)隨之發(fā)生相應(yīng)改變的要求,嚴(yán)重影響了控制效果[1]。本文介紹了基于給定系統(tǒng)的模糊PID控制,它不需要被控對象的數(shù)學(xué)模型,能夠在線自動(dòng)根據(jù)參數(shù)的變化實(shí)時(shí)修正參數(shù),使控制器適應(yīng)被控對象參數(shù)的任何變化,并對其進(jìn)行仿真驗(yàn)證。
1 傳統(tǒng)PID與模糊PID的比較
1.1 PID控制
PID控制器問世至今憑借其結(jié)構(gòu)簡單、穩(wěn)定性好、工作可靠、調(diào)整方便等優(yōu)點(diǎn)成為工業(yè)控制的主要技術(shù)之一。當(dāng)被控對象的結(jié)構(gòu)和參數(shù)不能完全掌握、得不到精確的數(shù)學(xué)模型時(shí),采用PID控制技術(shù)最為方便。PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心,它根據(jù)被控過程的特性來確定PID控制器的參數(shù)大小。PID控制原理簡單、易于實(shí)現(xiàn)、適用面廣,但PID控制器的參數(shù)整定是一件非常令人頭痛的事。合理的PID參數(shù)通常由經(jīng)驗(yàn)豐富的技術(shù)人員在線整定,在控制對象有很大的時(shí)變性和非線性的情況下,一組整定好的PID參數(shù)遠(yuǎn)遠(yuǎn)不能滿足系統(tǒng)的要求。為此,本文引入了一套模糊PID控制算法。
1.2 模糊PID控制
所謂模糊PID控制器,即利用模糊邏輯算法并根據(jù)一定的模糊規(guī)則對PID控制的比例、積分、微分系數(shù)進(jìn)行實(shí)時(shí)優(yōu)化,以達(dá)到較為理想的控制效果。模糊PID控制共包括參數(shù)模糊化、模糊規(guī)則推理、參數(shù)解模糊、PID控制器等幾個(gè)重要組成部分。計(jì)算機(jī)根據(jù)所設(shè)定的輸入和反饋信號,計(jì)算實(shí)際位置和理論位置的偏差e以及當(dāng)前的偏差變化ec,并根據(jù)模糊規(guī)則進(jìn)行模糊推理,最后對模糊參數(shù)進(jìn)行解模糊,輸出PID控制器的比例、積分、微分系數(shù)[2]。
2 給定被控系統(tǒng)
2.1 被控系統(tǒng)的組成
系統(tǒng)由兩部分組成:慣性環(huán)節(jié)和時(shí)間延遲環(huán)節(jié)組成,如圖1所示。

2.2 模糊PID控制器的設(shè)計(jì)
PID參數(shù)的模糊自整定是找出PID三個(gè)參數(shù)Kp、Ki、Kd與e和ec之間的模糊關(guān)系,在運(yùn)行中通過不斷地監(jiān)測e和ec,并根據(jù)模糊控制原理對三個(gè)參數(shù)進(jìn)行在線的整定。
PID參數(shù)的設(shè)定依靠經(jīng)驗(yàn)及工藝的熟悉,參考測量值與設(shè)定值曲線,從而調(diào)整Kp、Ki和Kd的大小。在此系統(tǒng)自動(dòng)采用如下公式對Kp、Ki、Kd參數(shù)進(jìn)行調(diào)整:
Kp=kp0+#kp
Ki=ki0+#ki
Kd=kd0+#kd
其中 #kp、#ki、#kd是模糊控制器的輸出量,kp0、ki0、kd0是由系統(tǒng)參數(shù)整定出來的,在此使用了如下整定公式:
kp=[(0.703+0.530 7×T÷L)×(T+0.5L)]÷[K×(T+L)]
Ti=T+0.5L
Td=0.5×L×T÷(T+0.5×L)
最終得到被控系統(tǒng)的初始PID參數(shù)是:
kp0=0.398 259,ki0=0.0 156 157,kd0=0.562 248。
這個(gè)初始參數(shù)的合理給定對整個(gè)模糊控制系統(tǒng)造成很大的影響。在此處使用的參數(shù)整定方法經(jīng)最終的實(shí)驗(yàn)得知是非常合適的。
模糊控制規(guī)則是用于修正PID參數(shù)的,模糊控制規(guī)則根據(jù)過程的階躍響應(yīng)情況來考慮求取。規(guī)則如表1所示。

表1 模糊控制規(guī)則
根據(jù)上述模糊控制規(guī)則,采用如下的PID參數(shù)的調(diào)節(jié)規(guī)則,如表 2、表 3、表 4所示,其中每個(gè)表格的第一行表示誤差變化量ec的模糊集合,第一列表示誤差e的模糊集合。
PID三個(gè)參數(shù)的模糊規(guī)則庫建立好以后,就可以根據(jù)模糊控制理論進(jìn)行參數(shù)的自調(diào)整。將系統(tǒng)誤差e,誤差變化量 ec,#kp、#ki、#kd的變化范圍定義為模糊上的論域:e,ec={-3,-2,-1,0,1,2,3},#kp={-0.3,-0.2,-0.1,0,0.1,0.2,0.3},#ki={-0.06,-0.04,-0.02,0,0.02,0.04,0.06},#kd={-3,-2,-1,0,1,2,3}。
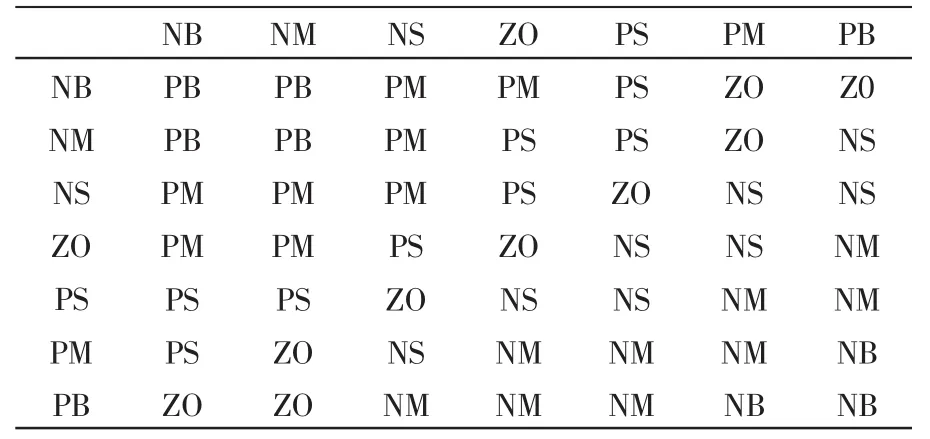
表2 #kp規(guī)則調(diào)節(jié)表
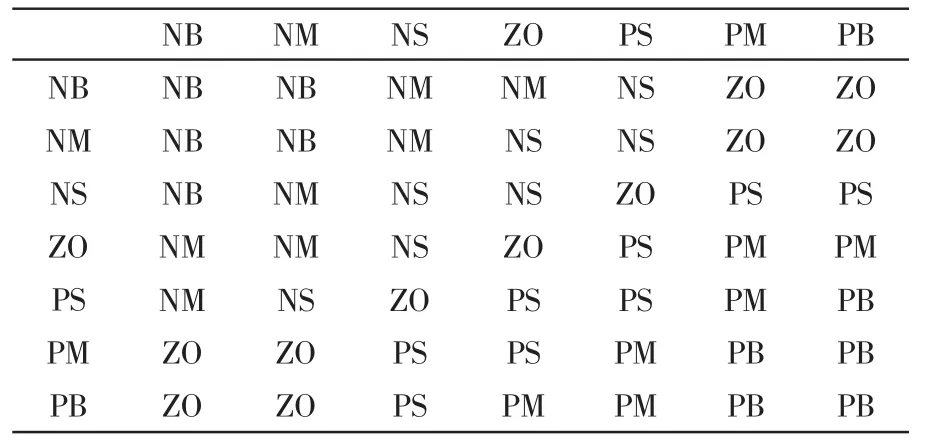
表3 #ki規(guī)則調(diào)節(jié)表

表4 #kd規(guī)則調(diào)節(jié)表
在模糊控制規(guī)律中,e、ec、#kp、#ki、#kd 的語言變量值取 “負(fù)大”(NB)、“負(fù)中”(NM)、“負(fù)小”(NS)、“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)共 7 個(gè)值。 它們的隸屬度函數(shù)都是三角形,并且每個(gè)值所取的范圍寬度相等。
3 仿真
3.1 仿真程序
本模糊控制器仿真程序是以m文件的形式給出的,需要運(yùn)行時(shí),只要把此m文件程序放到Matlab軟件中直接運(yùn)行即可,不需要其他任何操作[3]。
3.2 仿真結(jié)果
為了驗(yàn)證PID模糊控制器的控制效果,用Matlab/Simulink軟件進(jìn)行仿真,根據(jù)系統(tǒng)的數(shù)學(xué)模型,仿真框圖如圖2所示。
運(yùn)行仿真程序,得到如圖3所示的仿真結(jié)果。從圖中可以知道,在階躍響應(yīng)下,圖4所示的沒有過程控制PID仿真與圖5所示的傳統(tǒng)過程控制PID仿真相比,該系統(tǒng)的上升時(shí)間稍有改進(jìn),調(diào)節(jié)時(shí)間大大縮小,超調(diào)量明顯減小,大大提高了系統(tǒng)的動(dòng)態(tài)性能,由此可以明顯看出本文設(shè)計(jì)的模糊PID控制系統(tǒng)具有明顯的優(yōu)越性。

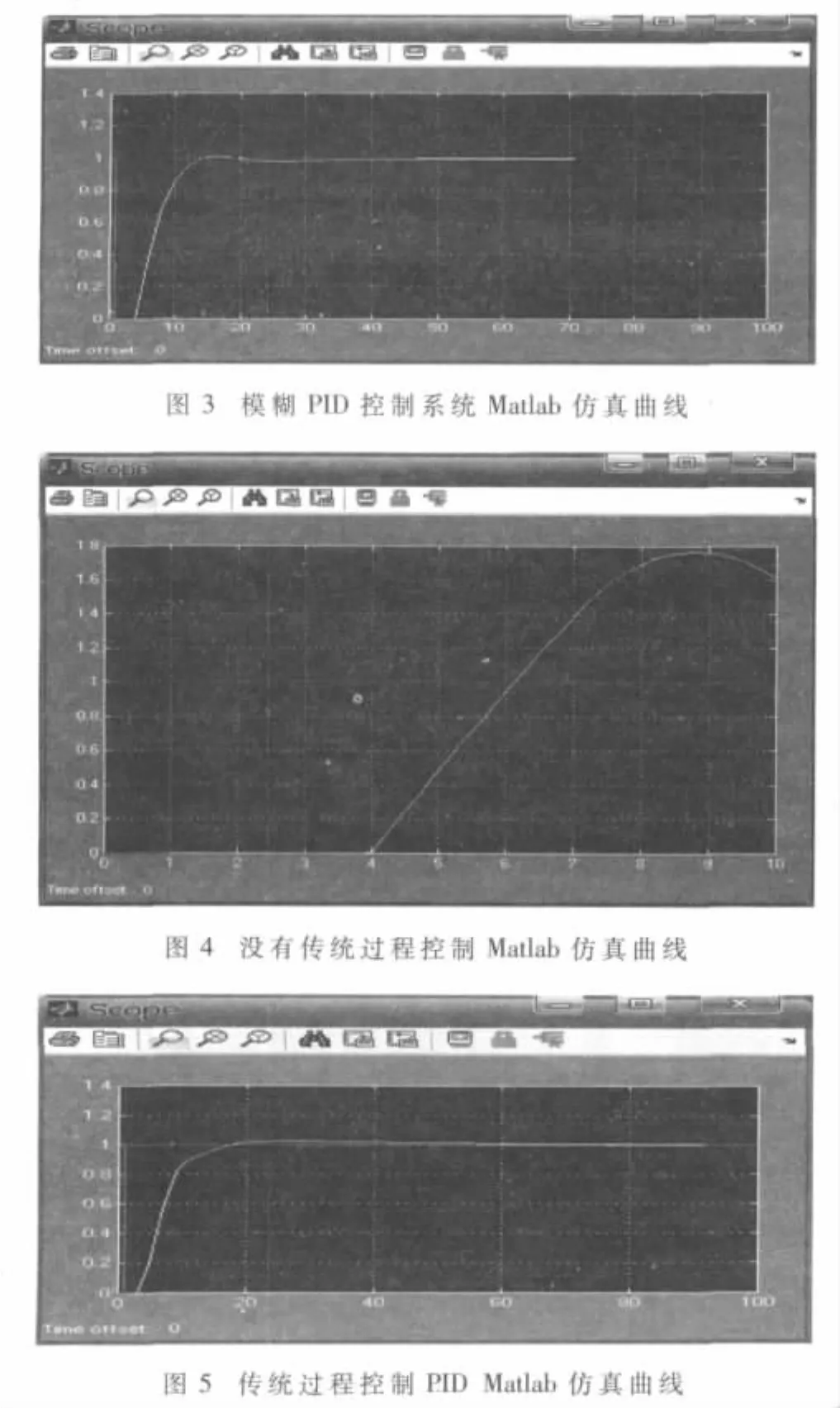
從圖3的最終仿真圖中,可以明顯地看出加入PID控制器后給整個(gè)系統(tǒng)的響應(yīng)帶來極大的改善,同時(shí)還可以看出模糊控制器在控制系統(tǒng)中所起的作用,因?yàn)樵趥鹘y(tǒng)過程 PID控制系統(tǒng)已經(jīng)取得很好的控制效果的前提條件下,正是由于模糊控制器的引入使得整個(gè)控制系統(tǒng)的控制效果又取得了更大更好的進(jìn)展,具體表現(xiàn)在被控系統(tǒng)的上升時(shí)間進(jìn)一步減小,但還是沒有滿足最初對于系統(tǒng)的性能要求,這也是本系統(tǒng)設(shè)計(jì)的一個(gè)不足之處,是需要繼續(xù)改進(jìn)的地方;系統(tǒng)超調(diào)量進(jìn)一步減小,從而完全滿足了對于被控系統(tǒng)的要求;5%穩(wěn)定時(shí)間進(jìn)一步地滿足系統(tǒng)的性能要求;系統(tǒng)穩(wěn)態(tài)誤差最終是0,完全滿足系統(tǒng)性能要求;系統(tǒng)阻尼程度進(jìn)一步減小。
本論文將模糊控制與Simulink相結(jié)合,對給定被控系統(tǒng)設(shè)計(jì)了一個(gè)比較合理的模糊PID控制器并且進(jìn)行Matlab仿真。由于被控系統(tǒng)處于一個(gè)實(shí)時(shí)變化的環(huán)境,系統(tǒng)參數(shù)可能會根據(jù)環(huán)境變化。傳統(tǒng)的固定控制參數(shù)的控制策略沒有辦法滿足這樣的需求,而模糊自適應(yīng)控制卻恰好彌補(bǔ)了這一缺陷。同時(shí)模糊自適應(yīng)控制還很好地解決了系統(tǒng)本身自帶的由于慣量引起的誤差。本文的創(chuàng)新點(diǎn)是結(jié)合給定被控系統(tǒng)分析設(shè)計(jì)了模糊PID控制器,并進(jìn)一步給出了自適應(yīng)模糊推理與優(yōu)化方案,現(xiàn)場實(shí)驗(yàn)效果良好。還需要改進(jìn)的地方主要表現(xiàn)在:(1)在本文中系統(tǒng)響應(yīng)的上升時(shí)間始終沒有小于10 s,需對系統(tǒng)繼續(xù)改進(jìn);(2)當(dāng)被控系統(tǒng)接入斜坡信號時(shí),對沒有過程控制PID的控制系統(tǒng)與具有傳統(tǒng)過程控制PID的控制系統(tǒng),相比較后者的效果明顯好于前者,但是當(dāng)本文設(shè)計(jì)的模糊PID控制系統(tǒng)接入斜坡信號時(shí),其輸出卻是發(fā)散的情況,需對系統(tǒng)繼續(xù)改進(jìn)。
[1]韓力群.智能控制理論及應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2008.
[2]愛民.模糊控制技術(shù)[M].西安:西安電子科技大學(xué)出版社,2008.
[3]黃忠霖,黃京.控制系統(tǒng) Matlab計(jì)算及仿真[M].北京:國防工業(yè)出版社,2009.
Fuzzy PID control based on given system
Jia Xiurong,Zhang Xinzheng
(Automation Institute,Guangdong University of Technology,Guangzhou 510006,China)
Based on the use of traditional PID control on singlechip,introduce into the transfer way of fuzzy rule.According to the deviation absolute value and the deviation change absolute value's change,regulate the PID parameter,finally do a Matlab simulation.By comparing the dynamic property of no adding PID control,the traditional PID control and the fuzzy PID control,prove the controlled system's dynamic property has a distinct improvement.
fuzzy PID;traditional PID;Matlab simulation
TP18
A
1674-7720(2011)02-0079-03
2010-09-16)
賈秀榮,女,1984年生,在讀碩士研究生,主要研究方向:系統(tǒng)工程。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
