激光掃描實(shí)驗(yàn)回波信號(hào)的分析
2011-01-17 05:15:54陳金令魏學(xué)明鄧林明
中國(guó)測(cè)試 2011年1期
陳金令,宿 丁,魏學(xué)明,鄧林明,繆 康
(1.四川長(zhǎng)虹電子科技有限公司,四川 綿陽(yáng) 621000;2.西南電子設(shè)備研究所,四川 成都 610036)
激光掃描實(shí)驗(yàn)回波信號(hào)的分析
陳金令1,宿 丁2,魏學(xué)明1,鄧林明1,繆 康1
(1.四川長(zhǎng)虹電子科技有限公司,四川 綿陽(yáng) 621000;2.西南電子設(shè)備研究所,四川 成都 610036)
利用激光回波信號(hào)的強(qiáng)度變化來(lái)測(cè)量物體邊緣輪廓的新型激光雷達(dá),并利用二維掃描、直接探測(cè)等技術(shù)建立了一套激光掃描實(shí)驗(yàn)系統(tǒng)。振鏡在X、Y方向分別以不同的頻率振動(dòng),當(dāng)激光經(jīng)過(guò)振鏡反射后,就以X、Y方向進(jìn)行二維掃描,激光二極管接收到的信號(hào)經(jīng)過(guò)濾波后被分為兩個(gè)不同頻率的信號(hào),分析這兩個(gè)不同頻率的信號(hào),就可以得到物體的輪廓信息。實(shí)驗(yàn)測(cè)量表明,通過(guò)測(cè)量回波強(qiáng)度變化來(lái)測(cè)量物體邊緣輪廓的方案是可行的。
激光雷達(dá);二維掃描;直接探測(cè);回波信號(hào);邊緣檢測(cè)
1 引言
在過(guò)去的20多年間,激光雷達(dá)得到了長(zhǎng)足的發(fā)展,在軍事、航空航天、工業(yè)和醫(yī)學(xué)等領(lǐng)域有廣泛的應(yīng)用。激光雷達(dá)可分為成像激光雷達(dá)和非成像激光雷達(dá)。非成像激光雷達(dá)與成像激光雷達(dá)相比,研究的費(fèi)用和難度大大低于成像激光雷達(dá)。對(duì)于非成像雷達(dá),提出了一種新的工作方式,即使用光電二極管(PIN)來(lái)探測(cè)從目標(biāo)返回的能量,根據(jù)反射回來(lái)的激光能量的變化來(lái)獲取目標(biāo)的輪廓信息,根據(jù)目標(biāo)的邊緣信息來(lái)進(jìn)行跟蹤和識(shí)別[1-3]。
2 試驗(yàn)原理
利用激光對(duì)目標(biāo)進(jìn)行掃描,激光回波信號(hào)包含被掃描目標(biāo)的邊緣、輪廓信息,這些信息很大程度反映在回波包絡(luò)形狀上。可以理解為目標(biāo)的邊緣、輪廓信息對(duì)激光束進(jìn)行了幅度調(diào)制,反射回來(lái)的激光就攜帶了目標(biāo)的邊緣、輪廓信息[4-6]。采用邊緣檢出法可以得到信號(hào)的邊緣信息。
控制光束掃描的方法有很多種,可分為機(jī)械掃描和非機(jī)械掃描。機(jī)械掃描大致包括擺動(dòng)平面鏡掃描、旋轉(zhuǎn)平面鏡掃描、旋轉(zhuǎn)折射棱鏡掃描等[7-9]。實(shí)驗(yàn)系統(tǒng)采用的是二維振鏡掃描方式,掃描器的X、Y兩個(gè)振鏡分別通過(guò)計(jì)算機(jī)程序設(shè)置的驅(qū)動(dòng)函數(shù)進(jìn)行振動(dòng),經(jīng)過(guò)合成,就可以將掃描圖形送向目標(biāo)。在實(shí)驗(yàn)中,X、Y兩個(gè)振鏡的驅(qū)動(dòng)函數(shù)都設(shè)置為正弦波函數(shù),掃描光束的直徑達(dá)10mm,振鏡X軸的掃描頻率為10Hz的正弦波,Y軸的掃描頻率為100Hz的正弦波。
實(shí)驗(yàn)的另一個(gè)關(guān)鍵技術(shù)是信號(hào)的探測(cè)問(wèn)題。在直接探測(cè)中,其光電系統(tǒng)直接響應(yīng)光輻射的強(qiáng)度,不涉及光輻射的相干性,它將待測(cè)光信號(hào)直接入射到光探測(cè)器的光敏面上,探測(cè)器響應(yīng)光輻射的強(qiáng)度而輸出相應(yīng)的光電流或光電壓信號(hào)。綜合考慮各種限制因素的影響,采用了光電二極管(PIN)直接探測(cè)的方式。PIN是高靈敏響應(yīng)器件,借助于示波器對(duì)目標(biāo)的回波信號(hào)進(jìn)行觀察,先通過(guò)調(diào)整接收透鏡和探測(cè)器的位置,使探測(cè)器在透鏡的焦平面上,然后調(diào)整探測(cè)器和透鏡的俯仰角度,使目標(biāo)調(diào)整到探測(cè)器的光敏面上,當(dāng)示波器上出現(xiàn)的信號(hào)達(dá)到最強(qiáng)而又不飽和時(shí),這時(shí)系統(tǒng)的掃描位置和信號(hào)接收就確定下來(lái)。
試驗(yàn)系統(tǒng)包括光源、光電探測(cè)器(PIN)、信號(hào)處理系統(tǒng)、數(shù)據(jù)處理軟件和顯示器等5部分組成。試驗(yàn)系統(tǒng)采用連續(xù)波激光器、二維掃描、直接探測(cè)、計(jì)算機(jī)顯示的工作方式。振鏡由計(jì)算機(jī)控制,提供X、Y方向的正弦擺動(dòng),激光器發(fā)出連續(xù)激光,然后經(jīng)過(guò)二維光束掃描系統(tǒng)(振鏡)指向目標(biāo),從目標(biāo)反射的回波信號(hào)經(jīng)過(guò)透鏡聚焦后由高靈敏度的光電二極管(PIN)接收,信號(hào)光經(jīng)過(guò)光電轉(zhuǎn)換后,送至高速數(shù)據(jù)采集卡,可以利用示波器進(jìn)行觀察或者直接送入計(jì)算機(jī)進(jìn)行信號(hào)的處理。圖1是試驗(yàn)系統(tǒng)結(jié)構(gòu)簡(jiǎn)圖,光束掃描系統(tǒng)是激光掃描系統(tǒng)中不可缺少的一部分,試驗(yàn)采用正弦掃描方式以滿足激光掃描系統(tǒng)的要求。掃描系統(tǒng)的振鏡分別通過(guò)計(jì)算機(jī)程序設(shè)置的驅(qū)動(dòng)函數(shù)進(jìn)行振動(dòng),經(jīng)過(guò)合成,就可以將掃描圖形送向目標(biāo)。振鏡X軸的擺動(dòng)頻率為10Hz,Y軸的擺動(dòng)頻率為100Hz。X、Y方向掃描初始相位相同,均為正方向掃描。即X方向一個(gè)掃描周期內(nèi)Y方向掃描了10個(gè)周期。

圖1 試驗(yàn)系統(tǒng)結(jié)構(gòu)簡(jiǎn)圖
3 試驗(yàn)結(jié)果分析
激光器發(fā)出連續(xù)激光,經(jīng)擴(kuò)束后由二維光學(xué)掃描系統(tǒng)(振鏡)指向目標(biāo),從目標(biāo)反射回的回波信號(hào)由高靈敏度的光電二極管(PIN)探測(cè),PIN的輸出由高速數(shù)據(jù)采集卡送入計(jì)算機(jī)處理[10]。

圖3 掃描圓錐物體得到的波形
激光器光源是中心波長(zhǎng)為650 nm的可見(jiàn)光半導(dǎo)體激光器,運(yùn)行機(jī)制為連續(xù)方式,功率約15mW。光束掃描系統(tǒng)是激光掃描系統(tǒng)中不可缺少的一部分,實(shí)驗(yàn)采用正弦掃描方式以滿足激光掃描系統(tǒng)的要求。振鏡X軸的擺動(dòng)頻率為10Hz,Y軸的擺動(dòng)頻率為100Hz。
接收系統(tǒng)包括透鏡、二極管探測(cè)器、高速數(shù)據(jù)采集卡等。接收透鏡的直徑為8 cm、焦距為30 cm。探測(cè)器采用國(guó)產(chǎn)GT101硅光電二極管(PIN),光敏面直徑為3mm。數(shù)據(jù)采集卡采用瑞博華公司的AD7301,采樣精度為12位,單端方式16通道,采集實(shí)際貫通率為50KS/s通道。利用Visual Basic6.0編制了信號(hào)采集軟件。該數(shù)據(jù)采集軟件可以實(shí)現(xiàn)數(shù)據(jù)采集、實(shí)時(shí)波形、數(shù)據(jù)存儲(chǔ)等功能。采樣頻率設(shè)定為5 000Hz。示波器用來(lái)觀察目標(biāo)回波信號(hào),實(shí)驗(yàn)中的數(shù)據(jù)主要是依據(jù)回波信號(hào)的強(qiáng)弱及峰值關(guān)系來(lái)處理的。
3.1 掃描圓錐物體試驗(yàn)分析
圓錐物體放置方式如圖2,振鏡以X軸10Hz,Y軸100Hz進(jìn)行正弦擺動(dòng),掃描圓錐物體得到的回波信號(hào)如圖3所示。對(duì)圓錐信號(hào)進(jìn)行濾波后,可得到10Hz和100Hz的信號(hào),濾波后的信號(hào)存在一定的延遲,其中經(jīng)過(guò)濾波后得到的100Hz信號(hào)如圖4所示。
將100Hz信號(hào)進(jìn)行解調(diào),得到解調(diào)后的波形如圖5所示,可以清楚地看出,經(jīng)過(guò)解調(diào)后的信號(hào)很好地反映了100Hz信號(hào)的包絡(luò)。

圖2 光束掃描圓錐物體方式示意圖
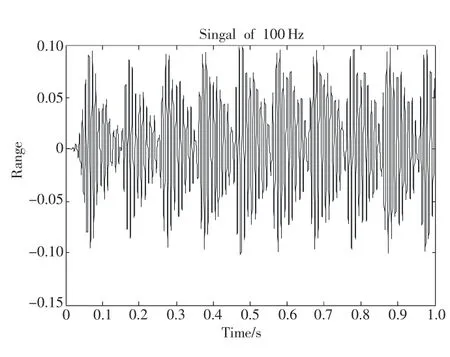
圖4 經(jīng)過(guò)濾波得到的100Hz信號(hào)
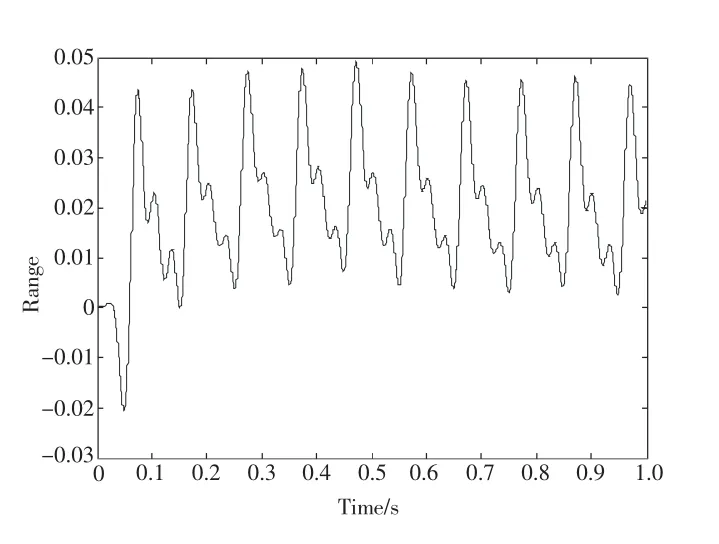
圖5 100Hz信號(hào)解調(diào)后的波形
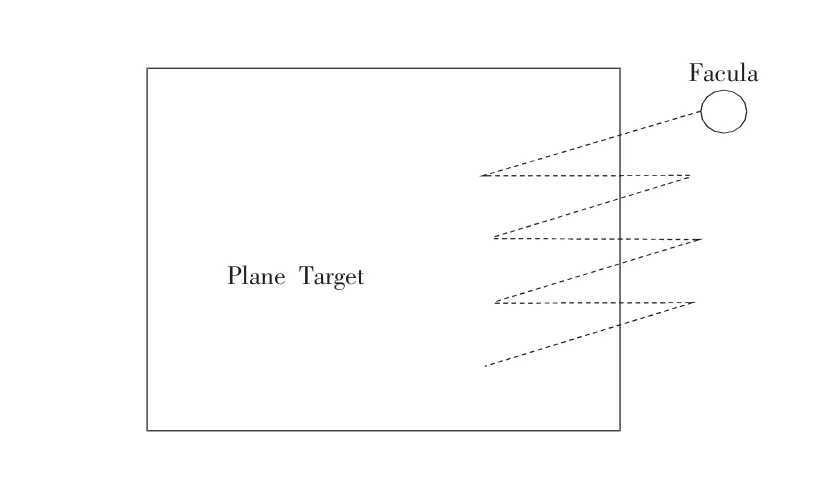
圖6 光束掃描平面物體方式示意圖
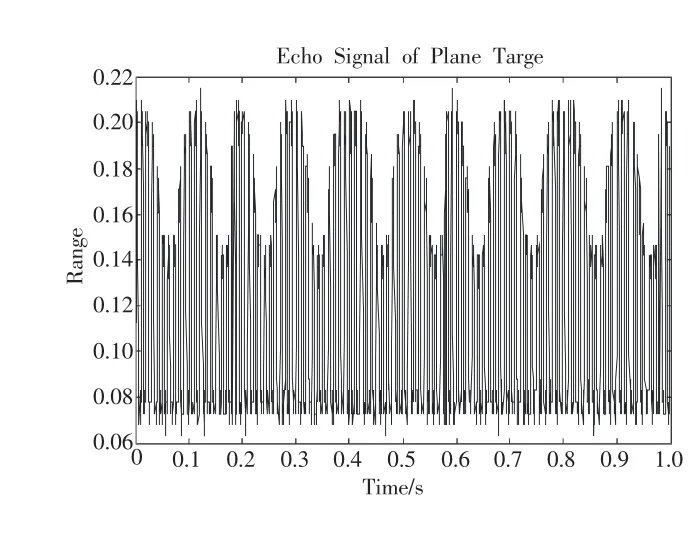
圖7 掃描平面物體物體得到的波形
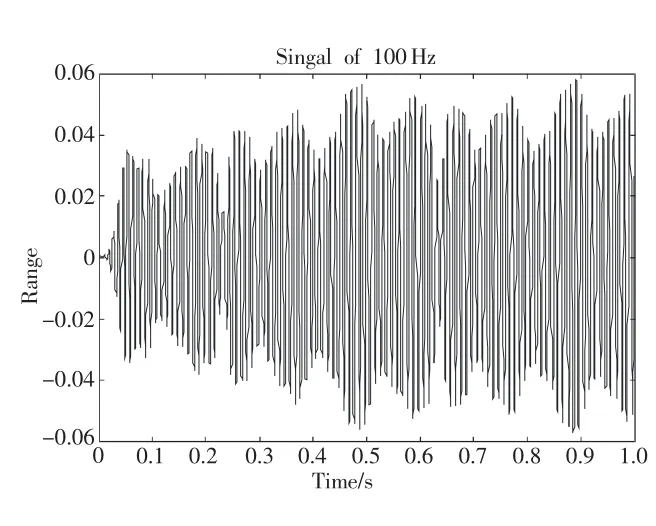
圖8 經(jīng)過(guò)濾波得到的100Hz信號(hào)
邊緣檢出主要有峰(谷)值、過(guò)零和激光半焦斑3種方法,下面將采用峰(谷)值檢出法進(jìn)行邊緣檢測(cè)。峰(谷)值檢出法也稱一次微分法,它是通過(guò)對(duì)探測(cè)器接收光強(qiáng)進(jìn)行微分來(lái)判斷光強(qiáng)的峰值點(diǎn)或谷值點(diǎn)的方法。過(guò)零檢出法也稱二次微分法,即對(duì)接收到的信號(hào)進(jìn)行二次微分,得到一個(gè)過(guò)零點(diǎn),用它來(lái)檢測(cè)目標(biāo)的邊緣位置。過(guò)零檢出法實(shí)質(zhì)是將邊緣定位點(diǎn)由峰頂或者谷底移到零點(diǎn),出現(xiàn)突變零點(diǎn)的位置對(duì)應(yīng)的就是邊緣位置[11-12]。試驗(yàn)主要利用峰(谷)值檢出法來(lái)得到邊緣信息。利用峰(谷)值檢出法對(duì)包絡(luò)圖5進(jìn)行處理,可以得到物體的邊緣位置信息,每一個(gè)波峰和波谷位置對(duì)應(yīng)的即為目標(biāo)的邊緣位置。
3.2 掃描平面物體試驗(yàn)分析
掃描平面物體得到的回波信號(hào),平面物體放置方式如圖6,首先X軸以10Hz進(jìn)行正弦擺動(dòng),Y軸以100Hz進(jìn)行正弦擺動(dòng),所得到的回波信號(hào)如圖7所示。

圖9 100Hz信號(hào)解調(diào)后的波形
對(duì)平面信號(hào)進(jìn)行濾波后,可得到10Hz和100Hz的信號(hào),將100Hz信號(hào)進(jìn)行解調(diào),得到解調(diào)后的波形如圖8所示,可以清楚地看出,信號(hào)存在一定的延遲,如圖9所示。圖9可以看出,經(jīng)過(guò)解調(diào)后的信號(hào)比較好地反映了100Hz信號(hào)的包絡(luò),但是解調(diào)后的信號(hào)存在一個(gè)向上的變化趨勢(shì),經(jīng)分析主要原因在于100Hz信號(hào)的濾波效果不是很好,所以才出現(xiàn)上面的情況。
利用峰(谷)值檢出法對(duì)包絡(luò)圖9進(jìn)行處理,可以得到物體的邊緣位置信息,每一個(gè)波峰和波谷位置對(duì)應(yīng)的即為目標(biāo)的邊緣位置。
4 結(jié)束語(yǔ)
該文提出了一種利用激光回波信號(hào)的強(qiáng)度測(cè)量物體邊緣輪廓的方法,并利用它測(cè)量了圓錐、平面等物體,根據(jù)返回信號(hào)強(qiáng)度的變化來(lái)測(cè)量物體的邊緣。結(jié)果表明,通過(guò)探測(cè)激光回波能量的變化來(lái)測(cè)量目標(biāo)的邊緣,進(jìn)而進(jìn)行目標(biāo)識(shí)別、跟蹤是可行的。
[1]Peter M,Livingston,Estates PV.Laser crossbody tracking system andmethod[P].United StatesPatent:5780838,1998.
[2]熊輝豐.激光雷達(dá)[M].北京:宇航出版社,1994:285.
[3]Teich M C.Homodyne detection of infrared radiation from moving diffuse target[J].Proc.IEEE,1969,57(5):786-792.
[4]Daugherty J,Hyman H.Rapid optical beam steering sensor suite for tactical weapon tracking applications[J].Proc. SPIE,Laser Beam Propagation and Control,1994,2120:211-217.
[5]張 輝,王涌天.激光目標(biāo)探測(cè)裝置的回波特性及目標(biāo)識(shí)別技術(shù)研究[J].光子學(xué)報(bào),2005,34(1):22-24.
[6]Meyzonnette J L,Remy B,Saccomani G,et al.Imaging CO2laser radar with chirp pulse compression[J].Proc.SPIE,Laser Radar II,1987,783:169-179.
[7]成向陽(yáng),李 寧,王海虹,等.半導(dǎo)體激光快速掃描雷達(dá)成像實(shí)驗(yàn)[J].中國(guó)激光,2001(7):658-660.
[8]呂海寶,湛廷政,周衛(wèi)紅,等.柱邊邊緣掃描檢出模型的研究[J].激光雜志,1998,19(5):14-17.
[9]呂海寶,楊華通.激光半焦斑邊緣檢出法測(cè)徑系統(tǒng)[J].基礎(chǔ)自動(dòng)化,2000,7(4):55-58.
[10]苗永平,劉永智.激光二維掃描顯示技術(shù)的研究[J].光學(xué)與光電技術(shù),2004,2(1):50-53.
[11]劉毅敏.基于Matlab的調(diào)制解調(diào)器的設(shè)計(jì)[J].現(xiàn)代計(jì)算機(jī),2005(7):95-97.
[12]朱 靜,徐 軍.用Matlab對(duì)雙邊帶抑制載波調(diào)制解調(diào)器的仿真分析[J].湖南城建高等專科學(xué)校學(xué)報(bào),2002,11(1):36-37.
Analysis for signal of the Laser rapid scanning experiments
CHEN Jin-ling1,SU Ding2,WEI Xue-ming1,DENG Lin-ming1,MIAO Kang1
(1.Changhong Electric Co.Ltd.,Mianyang 621000,China;2.Southwest Institute of Electronic Equipment,Chengdu 610036,China)
This paper presented a new laser radar that measures the profile of the target by detecting the change of returned laser energy.With 2-D scanning and direct detection technology,a rapid-scanning laser system was established.The system steers a mirror to oscillate in X and Y direction at different frequency,so the laser beam dither in two directions and scan the surface of target.The energy of the laser reflected from the target was detected by PIN.After filtration,the detected energy could be separated to the first and second dither frequency for each channel,thus the profile message of the target can be obtained.The experimental results prove that the proposed approach is effective for profile detection of the target.
laser radar;2-D scanning;direct detection;echo signal;edge detection
TN24;TM930.12
A
1674-5124(2011)01-0063-03
2009-12-28;
2010-03-09
陳金令(1975-),男,河南平頂山市人,高級(jí)工程師,博士,主要從事信號(hào)處理方面的研究。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
