GPS接收機測量位移方法研究
2011-01-10 01:42:10齊占輝張鎖平張東亮范有明
海洋技術學報 2011年3期
關鍵詞:測量
齊占輝,張鎖平,張東亮,范有明
(國家海洋技術中心,天津 300112)
GPS接收機測量位移方法研究
齊占輝,張鎖平,張東亮,范有明
(國家海洋技術中心,天津 300112)
首先介紹了全球定位系統(GPS)的工作原理;然后給出了利用多普勒頻偏原理測量GPS接收機天線位移的方法;最后通過現場實驗,對比GPS接收機天線的運動軌跡曲線和紅球的運動軌跡曲線,驗證了該測量位移方法的可行性。
全球定位系統;多普勒頻偏;速度;位移
全球定位系統(Global Positioning System簡稱GPS)是美國從20世紀70年代開始研制,于1994年全面建成,以接收導航衛星信號為基礎的非自主式導航與定位系統[1]。它能夠向全球用戶提供精確的三維空間位置信息、速度信息和時間信息。
GPS系統由24顆衛星構成,這些衛星分布在6個地心軌道平面內,每個軌道上有4顆衛星,相鄰軌道的衛星之間間隔約為40°,衛星的運行周期約為11小時58分鐘,每個運行軌道接近于圓形,并且沿赤道以60°的間隔均勻分開,軌道與赤道面的傾斜角為55°,從而保證了在地球上的任何地區和任何時間都能夠觀測到高度角15°以上的4顆衛星,進而能夠推算出GPS接收機的空間位置信息。
GPS系統利用到達時間(TOA)的測距原理來確定接收機的位置。這種測距原理測量的是衛星發出的信號傳播到達接收機所經過的時間,然后將這個信號傳播時間乘以信號的傳播速度,就可以得到衛星到接收機的測量距離R。由于這24顆衛星的三維空間位置坐標是已知的,根據數學公式推導可知,只要知道4顆或4顆以上衛星的測量距離R就可以解算出GPS接收機的三維空間位置坐標。
GPS系統因不同的定位服務,主要提供以下三種類型的原始觀測值,即偽距、載波相位和多普勒頻移。根據不同的定位精度要求,派生出單點定位、偽距差分定位、相位差分定位等多種定位模式[2]。
實際上,GPS系統定位的精度主要取決于使用GPS接收機的數目和解算算法的優劣。如果采用單機定位,其精度較差;如果使用雙機進行差分定位,則可以很大程度地提高定位精度,如RTK-GPS是使用兩部或兩部以上的GPS接收機,將其中一部GPS接收機安裝在三維空間位置坐標已知的固定位置處,該固定位置稱為GPS基準站。GPS基準站根據本身的空間位置坐標信息和接收到的GPS信號信息計算軌道誤差和大氣誤差造成的影響,然后根據影響計算出誤差修正值,并把該誤差修正值傳送至其他GPS接收機上,及時解算出GPS接收機與GPS基準站之間的相對位置坐標,從而提高了GPS接收機的測量精度。然而RTK-GPS測量技術的應用也有諸多限制,比如必須至少有一個基準站,并且隨著GPS接收機與基準站之間的距離增加,大氣誤差影響的改變,使得GPS接收機只能距離基準站約6~10 km才能達到厘米級的精度,因此其測量范圍局限在特定的區域[3]。
1 利用多普勒頻偏效應測量位移
對速度進行時間積分能夠得到位移,因此可以通過測量GPS接收機天線的瞬時速度來計算其位移變化。GPS接收機測速大致有三種方法:第一種是基于GPS高精度定位結果,通過位置差分來獲取速度;第二種是利用GPS原始多普勒觀測值直接計算速度;第三種是利用載波相位中心差分所獲得的多普勒觀測值來計算速度[4-5]。
兩個相對運動的物體之間會產生多普勒頻率漂移現象,如果知道了一個物體的運動速度和多普勒頻率偏移,就可以計算出另一個物體的速度。根據這一原理,由于GPS接收機與衛星之間存在相對運動,從而使GPS接收機接收到的信號頻率與衛星發射的信號頻率不同,因此只要知道GPS接收機接收到的信號頻率與衛星發射的信號頻率之間的頻率差值和衛星的運動速度就可以計算出GPS接收機的瞬時運動速度。
GPS接收機的瞬時運動速度為[6]:

GPS接收機的運動位移為[6]:

式中:vr表示GPS接收機的瞬時運動速度;vs表示衛星的運動速度;fd表示多普勒頻偏;fs表示衛星發射信號的頻率;c表示電磁波在空氣中的傳播速度;Δt表示采樣時間間隔;Δd表示GPS接收機在時間Δt內的位移。
根據公式(1)和公式(2)就可以計算出GPS接收機天線的位移變化。
2 現場實驗與分析
為了驗證GPS接收機利用多普勒頻偏效應測量天線位移方法的可行性,用采樣率為1 Hz的GPS接收機、刻度水尺、支架、攝像機和計算機組成了測量GPS接收機天線位移的實驗系統,如圖1所示。以直立式刻度水尺為靜態參考坐標系,GPS接收機天線和紅球一起綁定在橫桿的一端,橫桿的另一端固定在支架上。當橫桿做上下運動時,會帶動GPS接收機天線和紅球一起做上下運動,同時由旁邊的攝像機拍攝天線和紅球的運動軌跡圖像序列。如圖2所示,為攝像機拍攝的天線和紅球在某一時刻的位置圖像。經過圖像處理,提取出GPS接收機天線和紅球在垂直方向上的運動軌跡曲線;與此同時,GPS接收機天線的運動速度數據通過RS-232接口輸入到計算機,經過計算得到GPS接收機天線在垂直方向上的運動軌跡曲線。對比這兩條運動軌跡曲線,進而驗證利用多普勒頻偏效應測量天線位移方法的可行性。目,作為該像素處的平均像素值,這樣得到的圖像即為平均背景圖像。

圖1 現場實驗圖
首先介紹提取紅球運動軌跡曲線的方法。如圖3所示,為從原始圖像序列中提取紅球運動軌跡曲線的流程圖,該流程圖包括5個操作步驟,分別為平均背景圖像操作、差值圖像操作、圖像灰度變換操作、圖像二值變換操作和紅球位置點操作,經過這些操作后就可以從原始圖像序列中提取出紅球的運動軌跡曲線。下面分別介紹這幾個操作步驟。
步驟1:平均背景圖像操作
該操作首先在圖像序列中求出每個像素處所有圖像的像素值之和,然后用每個像素處的像素值之和除以圖像的數

圖2 GPS接收機天線和紅球在某一時刻的位置圖像
步驟2:差值圖像操作
差值圖像操作是用圖像序列中的每幀圖像減去平均背景圖像得到差值圖像,對相減之后為負數的像素差值取絕對值作為該像素處的像素差值。
步驟3:圖像灰度變換操作
原始圖像序列中的所有圖像都是24位RGB彩色圖像,因此經過差值圖像操作后的差值圖像仍為24位RGB彩色圖像,該差值圖像需要經過圖像灰度變換操作才能得到灰度差值圖像。
步驟4:圖像二值變換操作
選擇合適的閾值,對灰度差值圖像進行二值化操作,把灰度差值圖像變換為二值差值圖像。
步驟5:紅球位置點操作
對二值差值圖像,進行腐蝕化操作,去除噪聲點,得到紅球的圖像區域,對紅球圖像區域取重心,得到紅球的位置點。
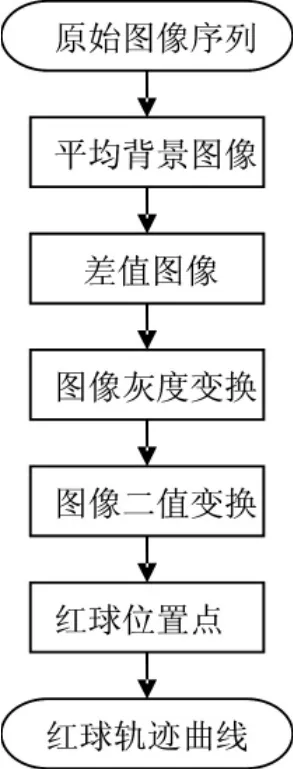
圖3 提取紅球運動軌跡曲線的流程圖
如圖4所示,為對原始圖像序列中的某幀圖像在提取紅球位置點過程中的系列圖像,圖4(A)為平均背景圖像,圖4(B)為原始幀圖像,圖4(C)為圖4(B)和圖4(A)的差值圖像,圖4(D)為256色灰度差值圖像,圖4(E)為二值差值圖像,圖4(F)為腐蝕后的二值差值圖像,從圖4(F)中求出紅球圖像區域(即圖中的白色區域)的重心,根據直立式水尺的刻度坐標,就可以換算得到紅球的位置點。按照以上的操作步驟,在原始圖像序列中,提取出每幀圖像中的紅球位置點,從而構成了紅球的運動軌跡曲線。
在實驗中,計算機采集了GPS接收機天線的速度數據序列,對速度數據序列進行積分,得到位移序列,位移序列在時間軸上展開就得到了GPS接收機天線在垂直方向上的運動軌跡曲線。
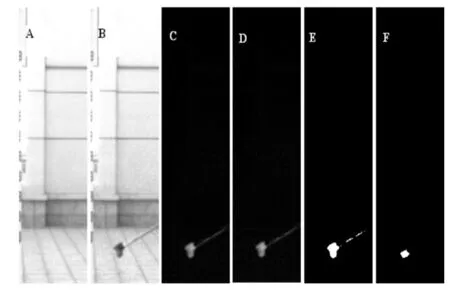
圖4 某幀圖像在提取紅球位置點過程中的圖像
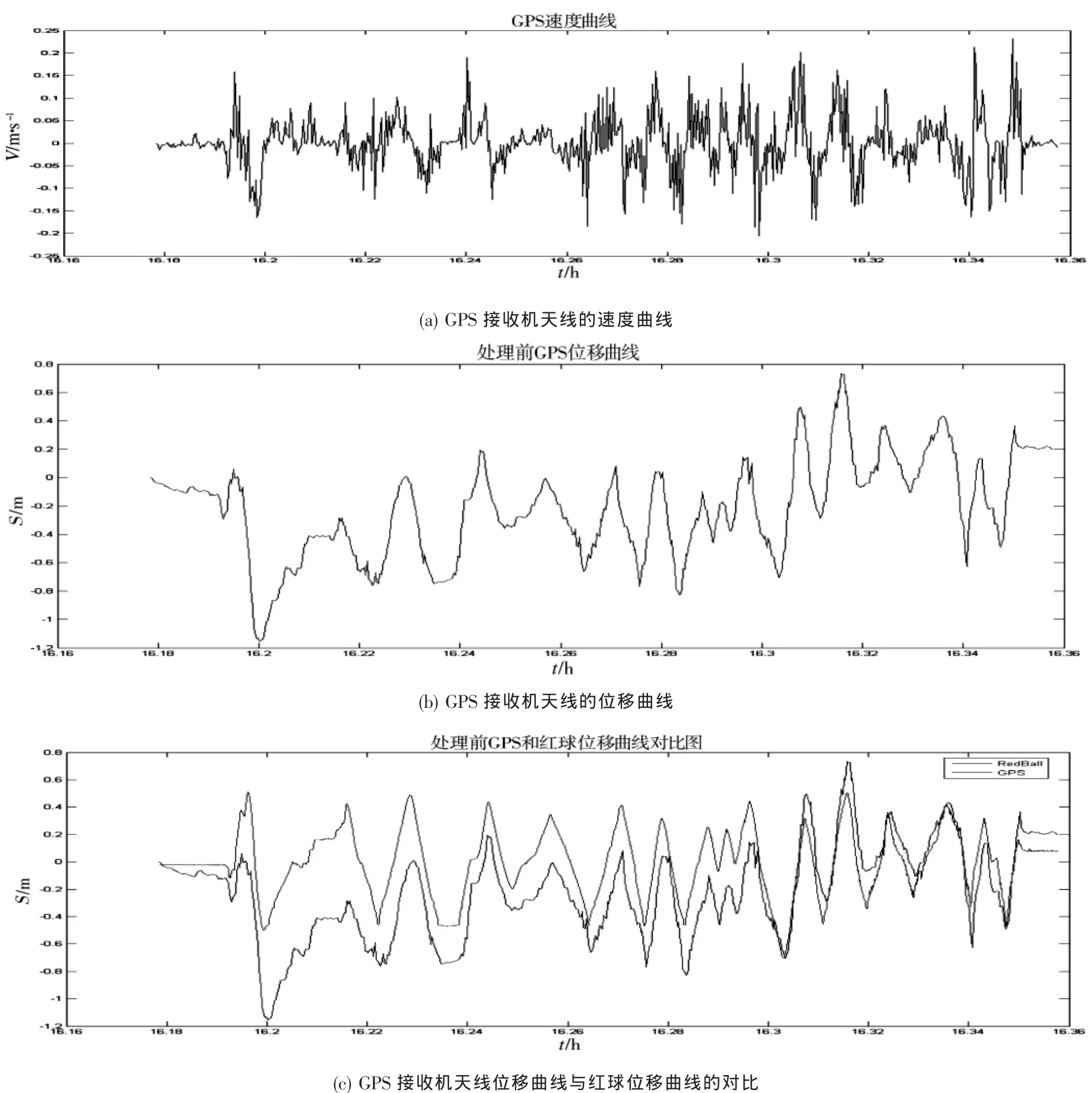
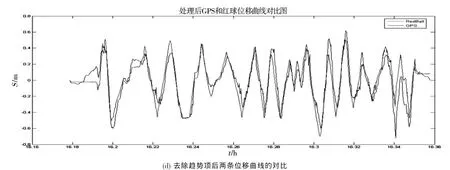
圖5 第一組位移曲線的實驗結果

圖5為第一組位移曲線的實驗結果。圖5(a)所示為GPS接收機天線的速度曲線,對速度曲線積分得到圖5(b)中的位移曲線,圖5(c)為GPS接收機天線位移曲線與紅球位移曲線的對比圖,從圖中可以看出,兩條位移曲線的誤差較大,一致性并不是很好,接收機天線位移曲線存在明顯的漂移趨勢。造成這種情況的原因初步分析是由于采集到的GPS接收機天線的速度數據序列中存在著個別錯誤的速度值,使在由速度序列積分得到位移序列的過程中,造成了零點漂移、誤差累積,從而出現了錯誤速度數據點后面的軌跡曲線整體上移或下移的現象,圖5(d)是從GPS天線的位移曲線中去除趨勢項后兩條位移曲線的對比圖。圖6(a)~(d)為另外四組數據的實驗結果,在這四組實驗中均去除了GPS接收機天線位移曲線的趨勢項。

圖6 另外四組數據的實驗結果
從以上五組實驗結果可以看出,GPS接收機天線的運動軌跡曲線與紅球的運動軌跡曲線有非常好的一致性,兩條位移曲線的形狀幾乎相同;但曲線的個別地方也有比較大的誤差,特別是在GPS接收機天線的運動方向發生改變時,位移曲線的拐角點處誤差較大,另外在紅球靜止的地方,有時GPS天線也會有微小的位移變化。上述誤差產生的原因初步分析是由于GPS系統存在著測速誤差,其誤差源有多種[7],比如衛星軌道誤差與衛星鐘差、衛星速度誤差、衛星鐘速誤差、相對論效應、對流層與電離層時延變化率、接收機位置誤差、多普勒觀測值誤差等;另外,GPS系統載波相位測量存在著整周模糊度與周跳的問題[8],也可能會對GPS測速產生影響。更好的提高測量精度的措施有待進一步的研究。
3 結論
本文首先介紹了全球定位系統(GPS)的工作原理,給出了利用多普勒頻偏原理測量GPS接收機天線位移的方法,然后做了GPS接收機天線運動軌跡曲線和紅球運動軌跡曲線的對比實驗,并給出了從圖像序列中提取紅球運動軌跡曲線的方法。通過實驗可知,兩條軌跡曲線有非常好的一致性,曲線形狀幾乎相同,但由于個別錯誤速度點的誤差累積,出現了零點漂移、曲線整體上移或下移的現象,但該實驗仍驗證了利用多普勒頻偏原理測量GPS接收機天線位移方法的可行性。下一步要做的主要工作是采用數據質量控制方法,減小速度序列的測量誤差,進一步提高測量精度。
[1]趙志禮,孟慶輝,張松濤,等.基于單片機的GPS定位信息處理[J].電子測試,2009(10):45-48.
[2]楊龍,劉焱雄,周興華,等.GPS測速精度分析與應用[J].海洋測繪,2007,27(2):26-29.
[3] 楊名.公分級 GPS 衛星即時動態定位系統[J].測量工程,1997,39(4):1-18.
[4]Ryan S,Lachapelle G,Cannon M E.DG-PS Kinematic Carrier Phase Signal Simulation Analysis in the Velocity Domain[C]//Proceedings of ION GPS 97,Kansas City:[s.n],1997.
[5]Szarmes M,Ryan S,Lachapelle G.DGPS High Accuracy Aircraft Velocity Determination Using Doppler Measurements[C]//Proceedings of the International Symposium on Kinematic Systems(KIS),Banff:[s.n.],1997.
[6]張鎖平.單點GPS浮標測波方法與數據質量控制研究[J].海洋技術,2008,27(3):15-18.
[7]王甫紅,張小紅,黃勁松.GPS單點測速的誤差分析及精度評價[J].武漢大學學報,2007,32(6):515-519.
[8]滕云龍,師奕兵.GPS載波相位測量數據的時間序列分析建模研究[J].電子測量與儀器學報,2009,23(9):18-22.
Research on Displacement Measurement Based on a GPS Receiver
QI Zhan-hui,ZHANG Suo-ping,ZHANG Dong-liang,FAN You-ming
(National Ocean Technology Center,Tianjin 300112,China)
The working principle of Global Positioning System is introduced firstly.Then,the method based on Doppler frequency shift principle for measuring a GPS receiver antenna’s displacement is proposed.The GPS receiver antenna’s trajectory curve and the red ball’s trajectory curve are compared through the field experiment finally,which verifies the feasibility of the method.
Global Positioning System;Doppler frequency shift;velocity;displacement
P715
A
1003-2029(2011)03-0035-06
2011-02-01
2011年國家海洋局青年科學基金—基于單點GPS傳感器的測波技術研究資助項目(2011420)
齊占輝,男,碩士,助理工程師,研究方向為海洋觀測技術。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
