天鐵集團煉鐵廠四號高爐主卷電路的改造和調(diào)試
2011-01-04 14:06:56陳海龍閆雙陳書香天津天鐵冶金集團煉鐵廠河北涉縣056404
天津冶金 2011年6期
陳海龍 閆雙 陳書香 (天津天鐵冶金集團煉鐵廠,河北涉縣 056404)
天鐵集團煉鐵廠四號高爐主卷電路的改造和調(diào)試
陳海龍 閆雙 陳書香 (天津天鐵冶金集團煉鐵廠,河北涉縣 056404)
在天鐵集團煉鐵廠四號高爐進行中修期間,對已經(jīng)老化的主卷揚電機老化的控制裝置進行了更換。為達到對其進行調(diào)速控制的目的,對其控制電路進行了改造。在調(diào)試過程中,還解決了右車裝礦電機啟動力矩過小的問題。經(jīng)過一年多的運行,實踐表明,改造后電器控制系統(tǒng)運行穩(wěn)定,故障顯著減少,滿足了高爐上料要求。
高爐 卷揚 直流 調(diào)速 控制 裝置
1 前言
天鐵集團煉鐵廠四號高爐從1998年大修投產(chǎn)以來,主卷揚直流電機控制裝置采用日本富士公司的DDC晶閘管直流調(diào)速裝置。該裝置到2008年4月就已經(jīng)達到使用年限(設計使用壽命約為10年),到現(xiàn)在已超期服役2年多。其電路板上的電子元件已嚴重老化,經(jīng)常性地出現(xiàn)故障(過流、超速、過電壓、電機轉(zhuǎn)速不穩(wěn)定等),嚴重影響高爐上料。而該型號直流調(diào)速裝置原廠家已不再生產(chǎn),因此急需更新,以保證高爐正常上料。
天鐵集團煉鐵廠電器技術人員經(jīng)研究決定,利用2010年7月份四高爐中修之際,對四號高爐主卷揚電機直流調(diào)速裝置和外圍相關電路進行更新改造。經(jīng)多次論證,我們決定選用ABB公司的新型直流調(diào)速裝置(以下簡稱數(shù)控),選擇型號為DCS800-S02-1200-05a(型號代碼為D5)。該直流調(diào)速裝置調(diào)整檢測直觀方便,進線電源電壓要求范圍寬(230VAC~525VAC),變流橋類型為反并聯(lián)雙橋,額定直流輸出電流為1 200 A,且過載能力強,能夠完全滿足主卷電機的調(diào)速要求。
2 問題的提出
為保證四號高爐正常上料,本次主卷揚電機控制電路的改造調(diào)試主要應考慮以下幾方面的問題。
2.1 電機啟動力矩必須足夠大,能足以克服料車和料重總重量以及各種摩擦力,以使料車能順利啟動起來。
2.2 運行周期(即料車上行及下行一次所用時間)要盡可能短。目的是要保證上料速度,使高爐不因料車速度慢而虧料線。
2.3 在軌道終點段內(nèi)(即距離料車軌道頂部和底部約3 m距離)料車速度不能過高。否則容易造成料車脫軌和料車與料坑稱斗溜嘴相撞事故。
2.4 停車要迅速、準確,以實現(xiàn)料車頂部和底部位置定位準確,以免造成料坑跑料和料車剩料。
2.5 能夠?qū)崿F(xiàn)單電機和雙電機的切換,以保證當某臺電機出現(xiàn)故障的情況下用單臺電機也可短時間維持上料。
2.6 無論選用單機還是雙機,料車運行和調(diào)速必須平穩(wěn)。
3 電路的改動
這次主卷電路改造是在原有電路基礎上的部分改動,考慮到要與卷揚其他電路及設備的配合,以及時間的因素,要求原有電路變動應盡可能少。
3.1 主電路(電樞電路)
由于電樞電路的運行和切換方式?jīng)]有變動,依然要求為兩主卷電機電樞電路串聯(lián),能夠?qū)崿F(xiàn)單機和雙機切換,以及能夠?qū)崿F(xiàn)1#數(shù)控和2#數(shù)控選擇。而原有電路完全能夠滿足要求,因此我們沒有對主電路進行改動,保持原樣。
3.2 勵磁電路
四號高爐原來的主卷電機勵磁線圈電源取自獨立的直流電源柜,220 V直流電經(jīng)兩路分壓電阻分壓后分別供給兩主卷電機勵磁線圈,兩電機勵磁電路為并聯(lián)連接。而新的數(shù)控裝置DCS800本身帶有勵磁輸出電路,并且能夠自我調(diào)節(jié),不需要外部直流電源。因此將兩主卷電機勵磁線圈由并聯(lián)改為串聯(lián),并去掉了分壓電阻,且使之能夠?qū)崿F(xiàn)單機和雙機切換。同時加裝了雙向刀開關Q7來實現(xiàn)1#數(shù)控和2#數(shù)控勵磁電源的選擇。如圖1所示。
3.3 控制回路
我們設置了5個控制繼電器,它們由PLC數(shù)字量輸出摸板經(jīng)主卷開閉器2SQ和切換開關1Q控制,用于給數(shù)控裝置提供控制信號。1K為左車上行繼電器,2K為右車上行繼電器,3K為中速繼電器,4K為高速繼電器,5K為單/雙機切換繼電器。設置了4個信號繼電器,它們由數(shù)控裝置數(shù)字量輸出接口控制,用于輸出裝置運行狀態(tài),并參與其他電路的聯(lián)鎖。7K為左車已上行繼電器,8K為右車已上行繼電器,9K為力矩已達到繼電器(即容許開抱閘繼電器),10K為裝置已準備好繼電器,如圖2所示。
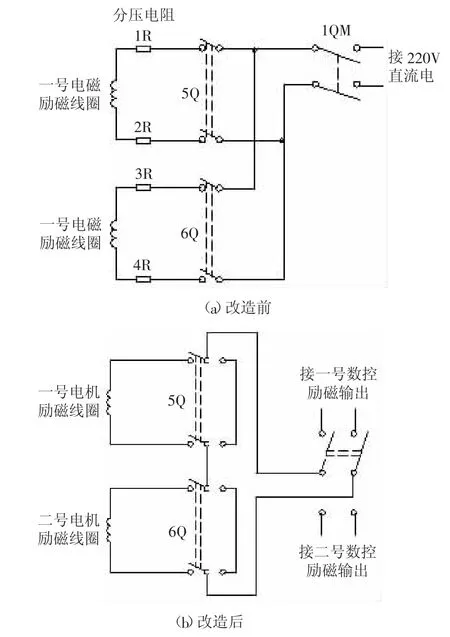
圖1 電機勵磁線圈連接示意圖
3.4 抱閘接觸器控制回路
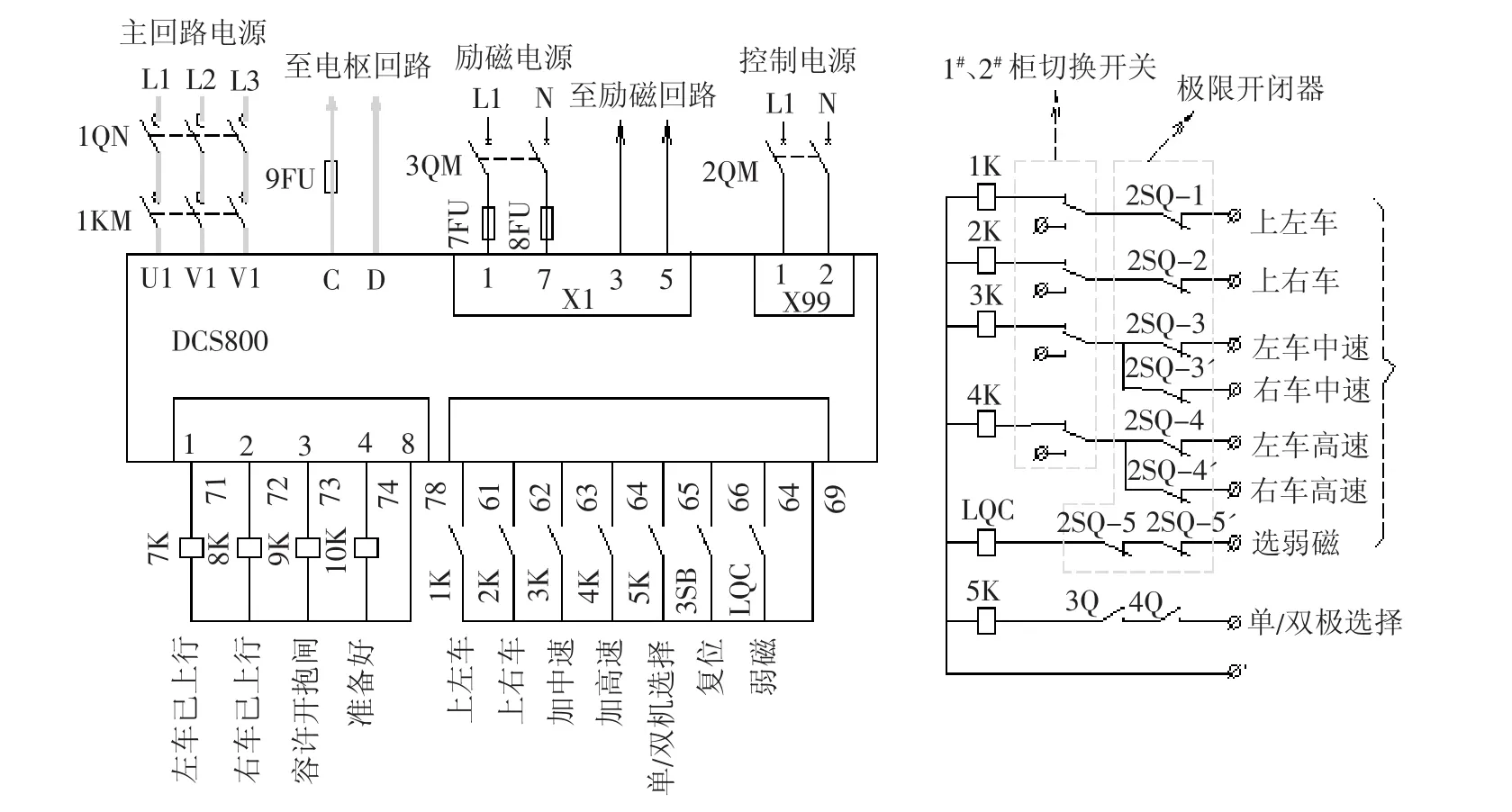
圖2 直流調(diào)速裝置接口電路圖
抱閘接觸器控制回路是主卷電路中非常重要的組成部分,原來為直流電路。由于其中的直流元件,特別是直流接觸器經(jīng)常損壞(觸點燒熔,吸合不到位,因線圈有剩磁而存在斷電延時等),經(jīng)常造成料車事故,且直流備件也不好配備。這次將它改成了交流電路,直流接觸器1DTC更換為普通交流接觸器(線圈電壓為交流110 V)。但它的連鎖和控制條件保持和原來一樣,如圖3所示。
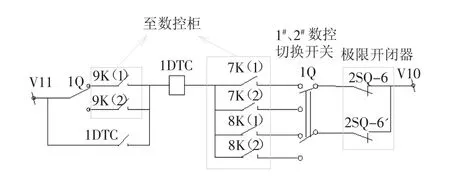
圖3 報閘控制電路
4 調(diào)試
4.1 空電機優(yōu)化
空電機優(yōu)化(不帶減速機、滾筒和料車,光電機測試)的目的是為了獲得準確的電機數(shù)據(jù)(如電機電樞線圈和磁場線圈的電阻、電抗等)和設定有關控制參數(shù)(如勵磁電流調(diào)節(jié)器控制參數(shù)、電樞電流調(diào)節(jié)器控制參數(shù)、速度調(diào)節(jié)器參數(shù)等)。DCS800數(shù)控裝置只有獲得了準確的電機數(shù)據(jù)和控制參數(shù),才能精確控制晶閘管的輸出,保證被控電機正常運行。由于主卷存在單機運行和雙機運行兩種情況,因此也必須分別進行單機優(yōu)化和雙機優(yōu)化,來分別獲得單機參數(shù)和雙機參數(shù)。優(yōu)化前必須正確地輸入電機銘牌數(shù)據(jù)(電樞額定電壓、電流,額定勵磁電流、額定速度等)。
單機和雙機優(yōu)化都包括以下幾步。
4.1.1 首先進行磁場電流調(diào)節(jié)器優(yōu)化,以獲得準確的電機磁場數(shù)據(jù)(主要包括磁場線圈的電阻、電抗、磁場電流調(diào)節(jié)器的比例系數(shù)Kp和積分時間Ks等)。磁場優(yōu)化前首先保證磁場回路處于連通狀態(tài)。
4.1.2 然后進行電樞電流調(diào)節(jié)器優(yōu)化,以獲得準確的電機電樞數(shù)據(jù)(主要包括電樞線圈的電阻、電抗、電樞電流調(diào)節(jié)器的比例系數(shù)Kp和積分時間Ks等)。電樞優(yōu)化前首先要使電樞回路接通,并斷開磁場回路;同時要使電機抱閘處于抱緊狀態(tài),避免電機因磁場繞組存在剩磁而轉(zhuǎn)動;并將直流調(diào)速裝置的反橋封鎖,否則電樞優(yōu)化可能失敗。
4.1.3 速度調(diào)節(jié)器(速度環(huán))優(yōu)化,目的是為了得到速度調(diào)節(jié)器的比例系數(shù)Kp和積分時間Ks等。速度環(huán)優(yōu)化前要使電樞回路和磁場回路都處于連通狀態(tài);電機抱閘處于打開狀態(tài),以便于電機能夠自由轉(zhuǎn)動調(diào)整。
4.1.4 速度反饋優(yōu)化,目的是為了得到速度反饋控制參數(shù)。優(yōu)化前要根據(jù)實際使用的反饋類型輸入正確參數(shù)(如脈沖編碼器的脈沖數(shù)或模擬測速機1 000 r/min時的輸出電壓等);其余注意事項同4.1.3節(jié)。因現(xiàn)有電機上沒有安裝測速裝置,所以速度反饋優(yōu)化未能進行。
由于DCS800數(shù)控裝置提供了非常直觀的優(yōu)化步驟,所以優(yōu)化過程較為簡單,只要按照提示逐步進行即可,這里就不再詳述。應注意在各項優(yōu)化完成后一定要查看并保存相關參數(shù),以防裝置停電而丟失數(shù)據(jù)。1#數(shù)控優(yōu)化完成后,可直接將1#數(shù)控優(yōu)化參數(shù)用控制面板或PC拷貝到2#數(shù)控,不必再進行優(yōu)化。
4.2 空電機試運行
空電機試運行(不帶減速機、齒接手、滾筒、料車)目的是察看數(shù)控裝置優(yōu)化完成后主卷電機運行的平穩(wěn)性,測試數(shù)控裝置的調(diào)速性能。空電機試運行也分為單機試運行和雙機試運行兩種情況。
4.2.1 單機試運行時要將主卷電路(包括電樞電路和磁場電路)切換到單機狀態(tài),然后用DCS800數(shù)控裝置自帶的控制面板或PC機(已安裝了DCS800直流調(diào)速裝置調(diào)試軟件)啟動數(shù)控裝置,使電機運行,并察看主卷電機運行的情況。如果用PC機操作還可以直觀地察看電樞電流和磁場電流,以及電機速度和電樞電壓等參數(shù)波形,能更好地判斷電機運行情況;并可根據(jù)運行情況適當調(diào)整相關參數(shù),以獲得最佳調(diào)節(jié)性能。
4.2.2 雙機試運行時要將主卷電路切換到雙機狀態(tài),測試和調(diào)整方法與單電機試運行方法一樣。
4.3 應用設置
4.3.1 啟/停信號的給出
啟/停信號由上左車繼電器1K或上右車繼電器2K給出,以實現(xiàn)數(shù)控裝置的運行和停止。為避免兩繼電器同時吸合造成數(shù)控裝置控制混亂,我們采用DCS800數(shù)控裝置內(nèi)部提供的自定義異或(XOR)指令,使二者只有一個吸合時,才發(fā)出啟/停信號;兩繼電器同時吸合或都不吸合時則無啟/停信號發(fā)出。
4.3.2 開閘時間的確定
若抱閘開的過早(如當啟/停信號一來就開閘)因為啟動開始的瞬間電機電流不能突變,它的上升有一個過程,這時電機轉(zhuǎn)矩還沒有建立起來或還很小不足以克服料車和料重總重量,則容易造成重車溜車和空車上天事故。因此抱閘必須在電機力矩不小于阻力力矩的情況下打開。如果抱閘開的過晚,提升力矩已足夠大,但抱閘還未打開,勢必造成電機堵轉(zhuǎn)現(xiàn)象使電樞電流迅速上升,造成過流故障,引起裝置跳閘。
我們綜合了料車重量和高爐料重設定情況以及料車軌道平滑度等因素,設定在電機力矩大于等于40%電機額定力矩時才容許開閘繼電器9K吸合,進而使抱閘接觸器得電,打開抱閘,避免溜車和憋流事故的發(fā)生。
4.3.3 料車速度的設定
對于高爐來說,料車上行和下行一次的運行時間越短越好。但在軌道終點段內(nèi)(即距離料車軌道頂部和底部約3 m距離)料車速度又不能過高。因此我們設置了3種運行速度:高速(由高速繼電器4K控制)中速(由中速繼電器3K控制)、低速(由上行繼電器1K和2K控制)。設置了2種運行方式:自動和手動,手動運行方式主要用于料車檢修或自動控制回路存在異常時使用。料車自動運行時高、中、低速的選擇是通過料車行程主令控制器(或行程碼盤)實現(xiàn)。料車手動運行時高、中、低速的選擇通過速度選擇開關和料車行程主令控制器(或行程碼盤)共同控制。
(1) 設定在剛起車時以低速起車并低速運行3 m距離,避免速度過快造成料車震蕩使坑下料車撞上料坑稱斗溜嘴;同時使頂部料車以較慢的速度脫離曲軌部分,避免料車脫軌。
(2) 設定在料車起動并低速運行3 m后(這時坑下料車底部位置已超過稱斗溜嘴且頂部料車也已脫離頂部曲軌),中速繼電器3K和高速繼電器4K依次吸合,料車以高速運行,以縮短運行周期。(3) 設定在上行料車距離頂部還有10 m左右(或下行料車離底部還有10 m左右)時,高速繼電器4K和中速繼電器3K依次斷電,料車由高速降為中速,最后降為低速,以保證料車在最后3 m行程內(nèi)為低速,停車時為低速停車。這樣可避免停車時因速度過快降低造成電機能量反饋,從而造成裝置過電壓;同時避免因料車過快,由于慣性的原因使頂部和底部停車位置不能精確控制,造成料車上天和墩底;還可避免高速停車對機械設備(抱閘、減速機、齒接手等)造成沖擊損壞。
4.3.4 單雙機切換
天鐵集團煉鐵廠四號高爐主卷電路設計為由兩直流電機串聯(lián),并且可實現(xiàn)單/雙機可切換。目的是為了實現(xiàn)當一臺電機故障情況下,用單臺電機也可短時間維持上料。由此,我們在參數(shù)設置中也分別設定了兩套電機運行參數(shù):單機運行參數(shù)(參數(shù)組1)、雙機運行參數(shù)(參數(shù)組2)。參數(shù)切換的控制指令由單/雙機選擇繼電器5K發(fā)出。外圍電路切換到雙機位置時,相應位置開關閉合使單/雙機切換繼電器5K吸合,裝置調(diào)用雙機運行參數(shù),實現(xiàn)雙機運行。外圍電路切換到單機運行位置時,相應位置開關斷開,單/雙機選擇繼電器5K斷電,裝置自動調(diào)用單機運行參數(shù),實現(xiàn)單機運行。
4.4 空載運行(帶減速機、齒接手、滾筒、料車,但不裝料)
空載運行的目的是為了檢測上一節(jié)應用設置(起動、停車、速度切換等)是否能夠真正起作用,調(diào)節(jié)能否實現(xiàn)。針對不太合適的地方(如電機的轉(zhuǎn)向和料車運行方向的一致性,低、中、高三種速度給定時的實際料車速度,加減速時間等)再做進一步的調(diào)整,以滿足實際需要。同時檢測電機與各種機械裝置的配合情況,以便能盡可能發(fā)現(xiàn)隱藏的問題,并及早消除,為正常上料做好準備。
4.4.1 空載運行時,我們發(fā)現(xiàn)料車運行方向和控制方向相反,于是通過將裝置數(shù)字輸入接口DI1(左車上行命令接口)和DI2(右車上行命令接口)分別取反,使料車運行方向和控制方向保持一致。
4.4.2 發(fā)現(xiàn)料車停車時機械裝置存在較大沖擊,估計是停車時車速較快。于是我們將低速給定值由額定轉(zhuǎn)速給定的45%降為額定轉(zhuǎn)速給定的30%,同時將加減速時間由3 s增加為8 s,使停車沖擊大大減小。
5 出現(xiàn)的問題與解決方案
5.1 在選擇雙機進行空電機試運行時,啟動后發(fā)現(xiàn)電機有異響,幾秒鐘后裝置發(fā)生過電流故障而停機。經(jīng)觀察發(fā)現(xiàn)勵磁電流波形正常,而電樞電流和轉(zhuǎn)速波形異常,電樞電流波形存在嚴重振蕩并出現(xiàn)尖峰,如圖4所示。懷疑是因為雙機優(yōu)化時兩電機并非一個整體,并且速度反饋因無測速裝置而沒能進行優(yōu)化,所以造成自整定數(shù)據(jù)可能不太準確,致使速度環(huán)超調(diào)。于是我們適當減小速度環(huán)比例系數(shù)Kp和適當增大比例環(huán)積分時間Ks。經(jīng)多次調(diào)整后,使電流和轉(zhuǎn)速波形趨于正常狀態(tài),啟動后經(jīng)兩次振蕩后就可平穩(wěn)運行。
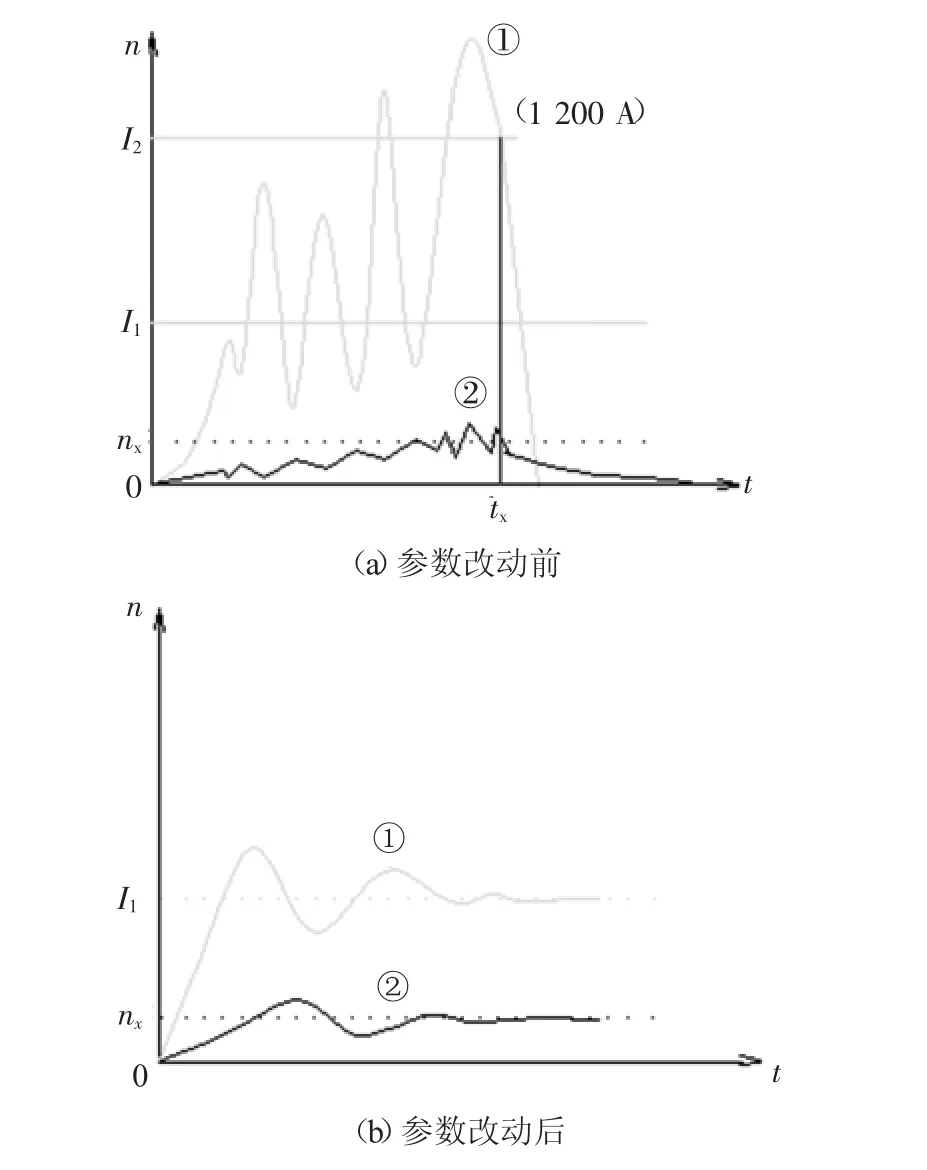
圖4 運行曲線示意圖
5.2 電機電樞回路上原來串聯(lián)有快速開關(起過流保護作用),快速開關過流跳開后因機械連鎖裝置方面的原因不易合閘。考慮到新直流傳動裝置上已經(jīng)提供了電樞回路快速熔斷器9FU,所以將快速開關拆除,不再使用。
5.3 高爐送風前上凈焦時電機運行正常。送風正常上料后,料車運行正常。隨著礦批的增加,右車裝礦起車時有時起不來,有時能起來但電機振蕩得厲害。經(jīng)觀察,電流波動較大,而且即使右車啟動起來后,裝同樣的料,右車電流比左車電流要高200 A左右。
5.3.1 原因分析
經(jīng)過多方面的分析研究,最終確定料車在右車裝礦時啟動轉(zhuǎn)矩過小,不足以克服料車空重和料重、以及各種摩擦阻力,從而產(chǎn)生電流振蕩。因數(shù)控裝置內(nèi)左右車運行參數(shù)一樣,電機啟動力矩一定大于料車裝焦上行時的綜合阻力力矩,也大于左車裝礦上行時的綜合阻力力矩,所以在裝焦和左車裝礦時起車正常。裝礦時,因左右料重基本一樣,料車自重也一樣(內(nèi)部都沒有剩料),所以只有右車車輪軸承摩擦系數(shù)較大,而摩擦系數(shù)又不是一個恒值,造成右車裝礦上行時綜合阻力力矩時大時小,當綜合阻力力矩超過了電機啟動力矩時,使右車啟動困難。
5.3.2 解決問題
由于我們在空載雙機試車時,為了滿足上料速度要求,將額定勵磁電流設定值由14.9 A減小為10 A,使高速給定(額定轉(zhuǎn)速給定)情況下車速由1.75 m提高到2.00 m。根據(jù)力矩公式:M=CeΦI(M為電機力矩,Ce為力矩常數(shù),Φ為電機主磁通,I為電樞電流)可知,轉(zhuǎn)矩M和磁通Φ成正比。又因磁通Φ與勵磁電流成正比(磁場不飽和的情況下),因此勵磁電流由14.9 A減小到10 A,磁通減小,則轉(zhuǎn)矩也降低。
為解決此問題,我們將勵磁電流設定由10 A恢復到電機額定勵磁電流14.9 A,電機啟動運行都恢復正常。但此時電機速度又達不到要求,經(jīng)多次調(diào)整,我們將電機勵磁電流設為14 A,可以完全滿足重載啟動要求,且有一定余量。高速給定由100%增加到105%,料車速度可達1.85 m,基本滿足速度要求。同時為適應高爐塌料時料線較深,需趕料線的要求,我們增加設置了弱磁給定。即在限定條件為:料車高速在情況下;在10~55 m范圍內(nèi);弱磁開關選擇時,將勵磁電流降為12 A,此時料車速度可達2.00 m。這樣既可保證料車速度,又保證了起車時的力矩要求(起車時弱磁選擇不起作用,勵磁電流設定仍為14 A)。
6 結(jié)束語
天鐵集團煉鐵廠四號高爐中修后從送風到現(xiàn)在,經(jīng)過一年多的運行,主卷揚電氣系統(tǒng)運行平穩(wěn),故障次數(shù)比原來減少了約3/4,充分滿足了高爐上料要求,同時大大減輕了電氣維護人員的勞動強度,效果非常好。ALLURGY
Modification and Commissioning of Main Hoist Circuit of Tiantie Group BF 4
Chen Hailong,Yan Shuang,Chen Shuxiang
The aged electric control device of main hoist DC motor was replaced during intermediate maintenance at BF4,Iron-making Subsidiary,Tiantie Group.Its control circuit was modified to achieve variable speed control of main hoist motor and eliminate the problem of small start torque of right carriage’s charging motor during commissioning course.More than one year’s running of the electric control device showed few failures and the charging demand of blast furnace was met.
blast furnace,hoist,DC,speed regulation,control,device
(收稿 2011-10-12 責編 崔建華)
陳海龍,男,天津大學機電分校自動化專業(yè),工程師,現(xiàn)在天鐵集團煉鐵廠自動化車間從事電氣儀表維護工作。
