基于聯(lián)合仿真的四輪轉(zhuǎn)向汽車(chē)控制策略研究
2010-11-09 08:18:02鄧召文
馮 櫻,鄧召文,高 偉
(湖北汽車(chē)工業(yè)學(xué)院汽車(chē)工程系,湖北十堰442002)
四輪轉(zhuǎn)向(4WS)是汽車(chē)工業(yè)的高新技術(shù)之一,是主動(dòng)底盤(pán)控制技術(shù)研究的關(guān)鍵。4WS汽車(chē)通過(guò)后輪直接參與對(duì)汽車(chē)側(cè)向及橫擺運(yùn)動(dòng)的控制,不僅減少了轉(zhuǎn)向力產(chǎn)生的滯后,而且能獨(dú)立地控制汽車(chē)的運(yùn)動(dòng)軌跡與姿態(tài),使汽車(chē)的方向角與姿態(tài)角重合,改善了車(chē)輛高速時(shí)的操縱穩(wěn)定性和低速時(shí)的機(jī)動(dòng)靈活性[1]。
目前,4WS所采用的控制策略基本都是基于線性二自由度模型,圍繞著使車(chē)輛質(zhì)心的側(cè)偏角為0,以提高側(cè)向穩(wěn)定性。但車(chē)輛狀態(tài)和外界干擾的不確定性直接影響控制系統(tǒng)設(shè)計(jì),控制性能往往難以達(dá)到設(shè)計(jì)要求[2]。對(duì)4WS控制系統(tǒng)的研究已逐漸從線性向非線性領(lǐng)域過(guò)渡。筆者在ADAMS中建立四輪轉(zhuǎn)向的多剛體整車(chē)動(dòng)力學(xué)模型,進(jìn)行了四輪轉(zhuǎn)向汽車(chē)控制策略研究,提出了比例前饋加模糊反饋的后輪轉(zhuǎn)角控制策略,在Matlab/Simulink設(shè)計(jì)了四輪轉(zhuǎn)向綜合控制器,并基于ADAMS和Matlab聯(lián)合仿真技術(shù)進(jìn)行了仿真試驗(yàn)。結(jié)果證明本文提出的控制方法和策略是有效的,為下一步進(jìn)行實(shí)車(chē)試驗(yàn),開(kāi)展轉(zhuǎn)向與制動(dòng)的集成研究奠定基礎(chǔ)。
1 整車(chē)多剛體動(dòng)力學(xué)模型
根據(jù)國(guó)產(chǎn)某轎車(chē)提供的數(shù)據(jù)參數(shù),運(yùn)用ADAMS軟件,通過(guò)面向?qū)ο蟮慕7椒ǎ紫仍谀0褰⑾到y(tǒng)的運(yùn)動(dòng)部件、機(jī)構(gòu)約束以及與外部的信息通訊,再創(chuàng)建子系統(tǒng),最后裝配成整車(chē)[3]。所建立的整車(chē)模型包括:
1)前懸架子系統(tǒng):麥弗遜獨(dú)立懸架。
2)前輪轉(zhuǎn)向子系統(tǒng):齒輪齒條式轉(zhuǎn)向系統(tǒng)。前輪轉(zhuǎn)角由駕駛員通過(guò)轉(zhuǎn)向盤(pán)及轉(zhuǎn)向傳動(dòng)機(jī)構(gòu)控制。
3)后懸架及轉(zhuǎn)向子系統(tǒng):帶齒輪齒條式轉(zhuǎn)向機(jī)構(gòu)的多連桿式懸架。在多連桿式懸架子系統(tǒng)模板[4]中增加左右轉(zhuǎn)向橫拉桿、轉(zhuǎn)向齒條和齒條殼體4個(gè)部件,并定義相應(yīng)的約束副。通過(guò)在轉(zhuǎn)向齒條和齒條殼體之間的移動(dòng)副上定義一個(gè)位移執(zhí)行器,由控制器控制,以實(shí)現(xiàn)后輪主動(dòng)轉(zhuǎn)向控制。若位移執(zhí)行器輸入為0,整車(chē)模型變?yōu)榍拜嗈D(zhuǎn)向模型。
4)車(chē)身子系統(tǒng):建立在剛性底盤(pán)模板的基礎(chǔ)上,整車(chē)其他子系統(tǒng)直接或間接與之連接。車(chē)輛的質(zhì)量、轉(zhuǎn)動(dòng)慣量以及靜態(tài)載荷分布在該子系統(tǒng)中進(jìn)行定義。
5)動(dòng)力總成系統(tǒng):四缸直列發(fā)動(dòng)機(jī),發(fā)動(dòng)機(jī)前橫置前輪驅(qū)動(dòng)。
6)制動(dòng)子系統(tǒng):前、后輪制動(dòng)器采用液壓盤(pán)式制動(dòng)器。
7)輪胎子系統(tǒng):輪胎模型利用國(guó)際上通用的Magic Formula模型,它是用三角函數(shù)的組合公式擬合輪胎試驗(yàn)數(shù)據(jù),輪胎模型的一般表達(dá)式為:

式中:Y(x)可以是縱向力、側(cè)向力或回正力矩,自變量x可以在不同的情況下分別表示輪胎的縱向滑移率s、側(cè)偏角α、外傾角γ和垂直載荷Fz;系數(shù)B、C、D、E由輪胎的垂直載荷和外傾角等來(lái)確定。
整車(chē)模型建成后,通過(guò)與實(shí)車(chē)實(shí)驗(yàn)數(shù)據(jù)對(duì)比,對(duì)所建模型進(jìn)行不斷地調(diào)試和仿真計(jì)算,驗(yàn)證仿真模型的有效性,使其最終達(dá)到工程所要求的精度。整車(chē)主要參數(shù)列于表1,隱藏了車(chē)身幾何的整車(chē)模型(圖1)。
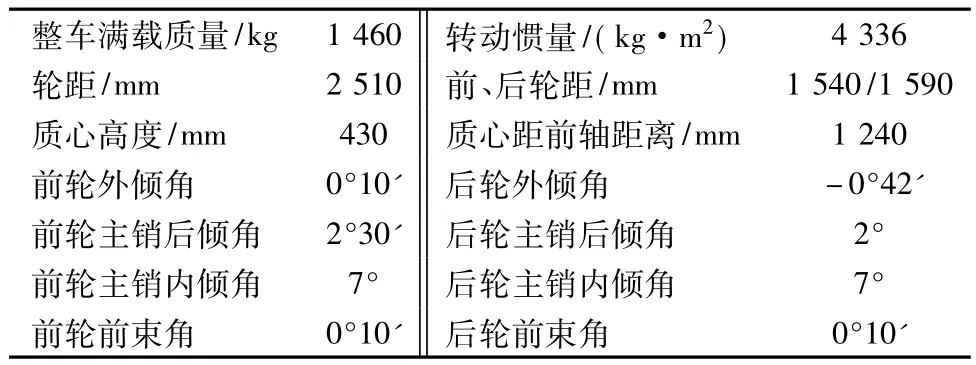
表1 整車(chē)模型主要參數(shù)Tab.1 Main parameters of vehicle model
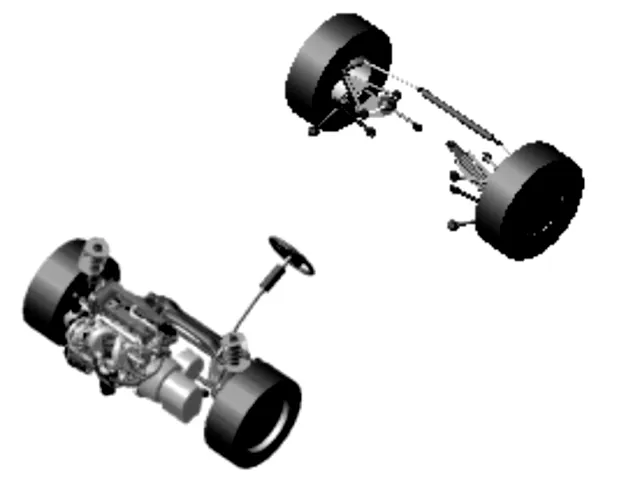
圖1 整車(chē)模型Fig.1 Vehicle model
2 四輪轉(zhuǎn)向控制系統(tǒng)設(shè)計(jì)
2.1 后輪轉(zhuǎn)向控制策略
4WS的顯著優(yōu)勢(shì)是高速轉(zhuǎn)向時(shí)通過(guò)主動(dòng)實(shí)現(xiàn)汽車(chē)后輪轉(zhuǎn)向,有效改善汽車(chē)的操縱穩(wěn)定性。由于橫擺角速度和側(cè)偏角是描述汽車(chē)動(dòng)力學(xué)穩(wěn)定性的最佳狀態(tài)變量,所以通過(guò)比較橫擺角速度和側(cè)偏角與理想值之間的差值就可以確定出汽車(chē)行駛狀態(tài)的穩(wěn)定程度[5]。早期四輪轉(zhuǎn)向控制目標(biāo)大多是控制質(zhì)心側(cè)偏角為0,使汽車(chē)在中、低速時(shí)有良好的機(jī)動(dòng)靈活性,但在高速時(shí)出現(xiàn)橫擺率穩(wěn)態(tài)增益減小、相位滯后增加等問(wèn)題,導(dǎo)致車(chē)輛的不足轉(zhuǎn)向過(guò)多[6]。H2/H∞多目標(biāo)綜合控制具有較高魯棒性,較好地改善了車(chē)輛的操縱穩(wěn)定性,但要測(cè)量多個(gè)狀態(tài)量,特別是無(wú)法用合理成本測(cè)得質(zhì)心側(cè)偏角[7]。以側(cè)偏角及車(chē)身橫擺角速度作為輸入的模糊控制能較大地改善車(chē)輛的操控特性,并具有較強(qiáng)的魯棒性[8]。但同樣存在質(zhì)心側(cè)偏角測(cè)量問(wèn)題,大大減弱了算法的實(shí)用性。比例于前輪轉(zhuǎn)角加比例于橫擺角速度控制的后輪轉(zhuǎn)向控制方法可使綜合性能得到優(yōu)化[9]。
由于比例于前輪轉(zhuǎn)角的后輪控制無(wú)論在高速還是低速,質(zhì)心側(cè)偏角在經(jīng)過(guò)短暫超調(diào)后總能保持為0[10],故筆者控制方案保留比例于前輪轉(zhuǎn)角的后輪轉(zhuǎn)角前饋控制;考慮到車(chē)輛的側(cè)偏角和橫擺角速度是相互耦合的,采用比例前饋控制后,汽車(chē)質(zhì)心側(cè)偏角已得到控制,鑒于實(shí)際的質(zhì)心側(cè)偏角不易測(cè)得,故選用汽車(chē)的橫擺角速度作為反饋的控制變量,對(duì)后輪進(jìn)行模糊反饋控制。即控制策略為比例前饋控制加基于橫擺角速度誤差及其變化率的模糊反饋控制。通過(guò)前饋控制提高汽車(chē)運(yùn)動(dòng)狀態(tài)的瞬態(tài)響應(yīng)性能,模糊反饋控制用于適應(yīng)整車(chē)多剛體多力學(xué)模型的非線性和時(shí)變性,以實(shí)現(xiàn)汽車(chē)運(yùn)動(dòng)狀態(tài)對(duì)理想?yún)⒖寄P偷膭?dòng)力學(xué)響應(yīng)良好的跟蹤性。后輪轉(zhuǎn)角總的控制表達(dá)式為:

汽車(chē)四輪轉(zhuǎn)向控制的總體方案如圖2。圖2中,由ADAMS模塊輸出的整車(chē)橫擺角速度作為Matlab/Simulink控制系統(tǒng)的反饋輸入,與參考模型輸出的理想橫擺角速度進(jìn)行比較,兩者的誤差及其變化率作為模糊控制器的輸入,得到模糊控制器輸出U后,再與前饋比例控制量kδf一同構(gòu)成ADAMS整車(chē)模型中后輪轉(zhuǎn)向齒條的輸入量。
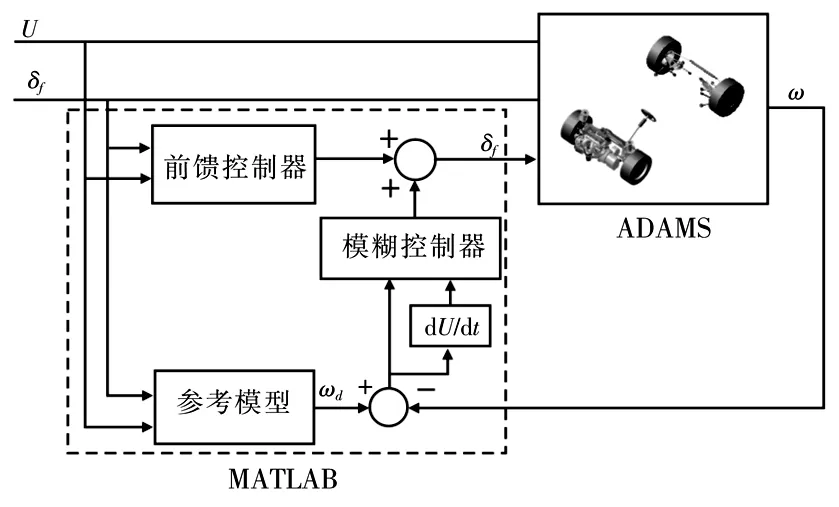
圖2 四輪轉(zhuǎn)向控制系統(tǒng)Fig.2 Structure of four-wheel steering control system
2.2 前饋控制器
比較典型的前饋型四輪轉(zhuǎn)向系統(tǒng)采取的是0質(zhì)心側(cè)偏角控制策略[11]。即:
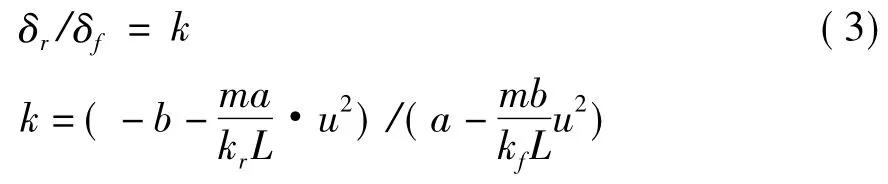
式中:a為質(zhì)心距前軸的距離;b為質(zhì)心距后軸的距離;L為軸距;m為整車(chē)質(zhì)量;kf、kr為前、后車(chē)輪的側(cè)偏剛度,仿真時(shí)取車(chē)輛靜載時(shí)由輪胎魔術(shù)公式計(jì)算所得的側(cè)偏剛度;u為汽車(chē)的車(chē)速。
2.3 參考模型
由于線性二自由度車(chē)輛模型,可以反映駕駛員的轉(zhuǎn)向輸入與橫擺角速度之間的線性關(guān)系,因此有文獻(xiàn)把線性二自由度車(chē)輛的轉(zhuǎn)向特性作為汽車(chē)?yán)硐氲霓D(zhuǎn)向特性。根據(jù)線性二自由度參考模型[12],由式(4)計(jì)算得到理想轉(zhuǎn)向橫擺角速度:
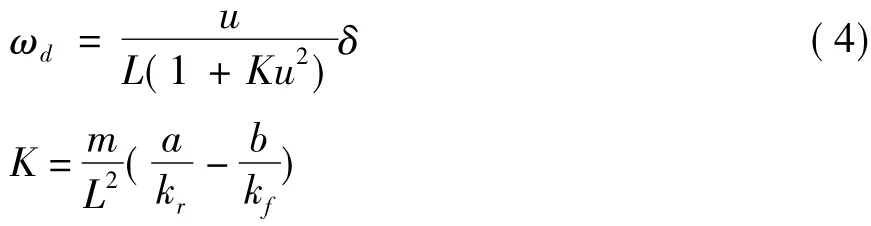
式中:K為汽車(chē)的穩(wěn)定性因數(shù);其它符號(hào)意義同前。
2.4 模糊控制器
以橫擺角速度誤差和誤差變化率為輸入、后轉(zhuǎn)向齒條位移為輸出的模糊控制器采用mandani推理法作為模糊控制算法,模糊控制器如圖3。

圖3 模糊控制器Fig.3 Fuzzy controller
輸入和輸出語(yǔ)言變量的模糊子集均為{NB,NM,NS,ZE,PS,PM,PB),其中:NB、NM、NS 分別表示負(fù)大、負(fù)中和負(fù)小;ZE表示0;PS、PM、PB分別表示正小、正中和正大。隸屬度函數(shù)取常用的三角形函數(shù),該隸屬函數(shù)運(yùn)算簡(jiǎn)單,有利于實(shí)時(shí)混合仿真,且又能滿(mǎn)足控制精度要求。輸入和輸出論域范圍,通過(guò)實(shí)際仿真得到。輸入輸出參變量的論域和隸屬度函數(shù)如圖4。在模糊數(shù)遠(yuǎn)離0時(shí),其對(duì)應(yīng)的詞匯數(shù)盡量少些,使控制器靈敏度增強(qiáng);模糊數(shù)靠近0時(shí),其對(duì)應(yīng)的詞匯多些,以保證控制的魯棒性,實(shí)現(xiàn)精細(xì)控制。

圖4 輸入和輸出變量隸屬度函數(shù)Fig.4 Membership functions of input and output variables
當(dāng)橫擺角速度誤差E為負(fù)大、誤差的變化EC為負(fù)大時(shí),誤差有變負(fù)大的趨勢(shì),要求控制器的輸出量U為正大,盡快跟上設(shè)定值的變化;當(dāng)誤差E為正大、誤差的變化EC為正大時(shí),看到誤差有變正大的趨勢(shì),而且此時(shí)超調(diào)量也有變大的趨勢(shì),于是要求控制器的輸出量U為負(fù)大,盡快減少超調(diào)量。
模糊控制器的部分模糊控制邏輯如下:
1.IfEis NB andECis NB thenUis PB;
4.IfEis NB andECis ZE thenUis PB;
35.IfEis PS andECis PB thenUis NM。
控制規(guī)則見(jiàn)表2。
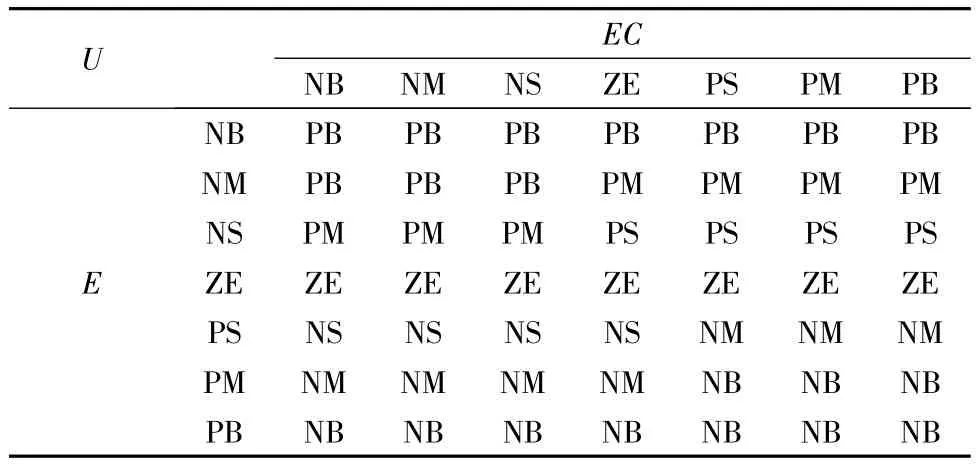
表2 模糊控制規(guī)則Tab.2 Table of fuzzy controller rules
3 ADAMS與Matlab聯(lián)合仿真
為了驗(yàn)證系統(tǒng)建模、控制策略和仿真算法的合理性和有效性,進(jìn)行了2種高速典型工況仿真試驗(yàn)。
3.1 工況1
工況1是在附著系數(shù)為0.8路面作單移線運(yùn)動(dòng),其中車(chē)速為100 km/h,前輪正弦輸入幅值為4 deg,頻率為0.33 Hz。圖5為作單移線運(yùn)動(dòng)時(shí)前輪轉(zhuǎn)向(FWS)汽車(chē)、比例前饋四輪轉(zhuǎn)向汽車(chē)和比例前饋加模糊反饋四輪轉(zhuǎn)向汽車(chē)仿真結(jié)果對(duì)比曲線。
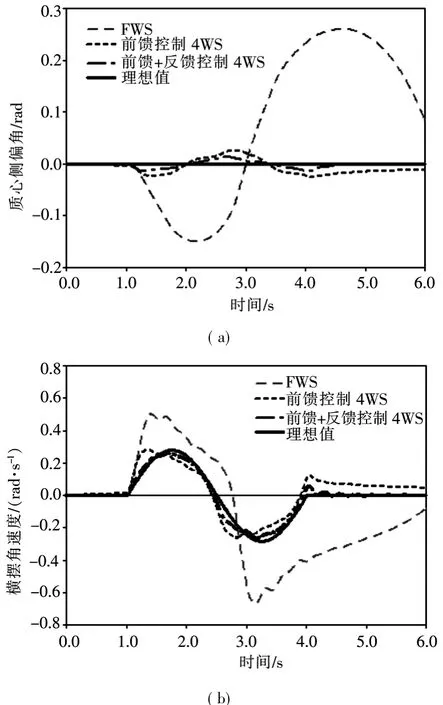
圖5 正弦轉(zhuǎn)向輸入下的響應(yīng)Fig.5 Responses under sine steering input
由圖5(a)、(b)可見(jiàn),在工況1下,前輪轉(zhuǎn)向汽車(chē)的質(zhì)心側(cè)偏角和橫擺角速度都嚴(yán)重偏離理想值,出現(xiàn)失穩(wěn)現(xiàn)象。采用比例前饋從理論上可以得出質(zhì)心側(cè)偏角恒為0的解析解,但由于4WS多體整車(chē)模型中考慮了輪胎的非線性和過(guò)程的時(shí)變性等因素的影響,質(zhì)心側(cè)偏角雖得到較好的控制,并不為0;橫擺角速度相對(duì)于理想值也有一定的偏差。而采用比例前饋加模糊反饋控制的4WS汽車(chē),由于模糊控制器的輸入量為橫擺角速度誤差及變化率,從圖5(b)可見(jiàn),其橫擺角速度與理想值極為接近;同時(shí)質(zhì)心側(cè)偏角的控制也優(yōu)于單純的比例前饋,即綜合控制效果良好。
3.2 工況2
工況2是在附著系數(shù)為0.8的路面上,車(chē)速為100 km/h,汽車(chē)作轉(zhuǎn)向盤(pán)為角階躍(前輪轉(zhuǎn)角為4°)輸入的運(yùn)動(dòng)。圖6為該工況下的仿真結(jié)果對(duì)比。
由圖6(a)、(b)可見(jiàn),前輪轉(zhuǎn)向汽車(chē)在工況2下,質(zhì)心側(cè)偏角和橫擺角速度都存在超調(diào),將產(chǎn)生轉(zhuǎn)向抖動(dòng)現(xiàn)象。采用比例前饋四輪轉(zhuǎn)向汽車(chē)的質(zhì)心側(cè)偏角和橫擺角速度均得到較好控制,且峰值減小,穩(wěn)定時(shí)間縮短。而采用比例前饋加模糊反饋控制策略的四輪汽車(chē)無(wú)論是橫擺角速度還是質(zhì)心側(cè)偏角的控制又明顯優(yōu)于比例前饋策略的四輪轉(zhuǎn)向汽車(chē)。
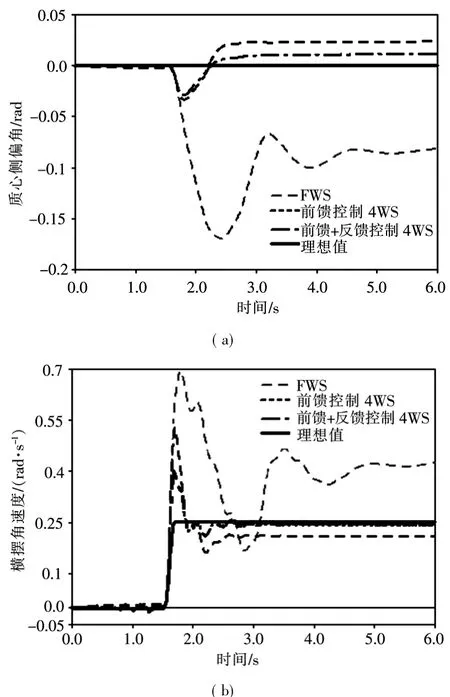
圖6 角階躍轉(zhuǎn)向輸入下的響應(yīng)Fig.6 Responses under step steering input
以上仿真結(jié)果表明,所設(shè)計(jì)的綜合控制器能很好地保持汽車(chē)在高速轉(zhuǎn)向操縱下的穩(wěn)定性,且系統(tǒng)響應(yīng)迅速。
4 結(jié)論
通過(guò)在ADAMS中建立的四輪轉(zhuǎn)向整車(chē)動(dòng)力學(xué)模型,在Matlab/Simulink環(huán)境中建立四輪轉(zhuǎn)向比例前饋加模糊反饋的綜合控制系統(tǒng)模型,與ADAMS的整車(chē)多剛體模型實(shí)現(xiàn)了聯(lián)合控制仿真。通過(guò)仿真研究可以看出,使用該控制策略時(shí)車(chē)輛橫擺角速度可以有效跟蹤理想模型保持在理想的水平。同時(shí),側(cè)偏角也能保持較為理想的動(dòng)態(tài)和穩(wěn)態(tài)特性,有效改善了車(chē)輛的操縱性能。
[1]屈求真,劉延柱,張建武.四輪轉(zhuǎn)向汽車(chē)自適應(yīng)模型跟蹤控制研究[J].汽車(chē)工程,2002,22(2):73 -76.
[2]王洪禮,張鋒,喬宇.汽車(chē)四輪轉(zhuǎn)向系統(tǒng)的非線性控制[J].機(jī)械強(qiáng)度,2003,25(2):130 -133.
[3]陳軍.MSC.ADAMS技術(shù)與工程分析實(shí)例[M].北京:中國(guó)水利水電出版社,2008:55-95.
[4]馮櫻,郭一鳴,鄭冬黎,等.基于ADAMS的整車(chē)建模和操縱穩(wěn)定性仿真評(píng)價(jià)[J].湖北汽車(chē)工業(yè)學(xué)院學(xué)報(bào),2009,23(3):7-10.
[5]汪東明.基于DYC控制的4WS汽車(chē)操縱穩(wěn)定[J].現(xiàn)代機(jī)械,2009(6):42-45.
[6]You S S,Chai Y H.Multi-objective control synthesis:an application to 4ws passenger vehicle[J].Mechatronics,1999(9):123-126.
[7]王洪禮,張鋒,喬宇,等.汽車(chē)四輪轉(zhuǎn)向系統(tǒng)的H2/H∞混合控制[J].汽車(chē)工程,2003,25(6):578 -580.
[8]張?jiān)魄澹R開(kāi)獻(xiàn),田強(qiáng),等.基于ADAMS和MATLAB協(xié)同仿真的轉(zhuǎn)向模糊控制策略研究[J].計(jì)算機(jī)集成制造系統(tǒng),2007,13(6):1235-1240.
[9]宋正華,陳南.4WS汽車(chē)虛擬模型的閉環(huán)控制動(dòng)力學(xué)仿真[J].機(jī)械制造與自動(dòng)化,2005,34(1):93 -96.
[10]Masato A,Yoshio K,Kazuasa S,et al.Side-slip control to stabilize vehicle lateral motion by direct yaw moment[J].JSAE Review,2001,22:413 -419.
[11][日]安部正人.汽車(chē)的運(yùn)動(dòng)和操縱[M].陳辛波,譯.北京:機(jī)械工業(yè)出版社,1998:174-177.
[12]余志生.汽車(chē)?yán)碚摚跰].北京:機(jī)械工業(yè)出版社,2010:140-150.
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
