基于無線網(wǎng)絡(luò)的移動機(jī)器人遠(yuǎn)程控制系統(tǒng)設(shè)計與實現(xiàn)
2010-08-22 07:35:10王新杰
制造業(yè)自動化 2010年1期
高 飛,王新杰
(鄭州輕工業(yè)學(xué)院 機(jī)電工程學(xué)院,鄭州 450002)
0 引言
機(jī)器人遠(yuǎn)程控制技術(shù)的研究開始于20世紀(jì)60年代,隨著人類對自然界的認(rèn)識和機(jī)器人應(yīng)用領(lǐng)域的不斷擴(kuò)大,不可避免出現(xiàn)一些相對比較惡劣的工作環(huán)境,比如,火山探險、深海探密、空間探索,軍事場地巡邏、偵察、監(jiān)視,在生物、化學(xué)、核試驗場地作業(yè)等。危險的環(huán)境,對操作人員的人身安全和身心健康造成極大危害,有時甚至導(dǎo)致死亡。因此很多在惡劣環(huán)境下對現(xiàn)場工作機(jī)器人的控制方式已從傳統(tǒng)的現(xiàn)場控制方式發(fā)展到無線遠(yuǎn)程控制方式。
1980年出現(xiàn)了第一個基于互聯(lián)網(wǎng)的控制設(shè)備“cambridgecoffeepot”“劍橋咖啡壺”。它由劍橋大學(xué)的科研人員開發(fā)的,“劍橋咖啡壺”的出現(xiàn)以及后來Internet的快速發(fā)展,使得操作機(jī)器人網(wǎng)站和基于互聯(lián)網(wǎng)的可控設(shè)備在幾年內(nèi)大量涌現(xiàn)。在國內(nèi),中科院沈陽自動化研究所研制的主從異構(gòu)的監(jiān)控遠(yuǎn)程控制系統(tǒng);哈爾濱工業(yè)大學(xué)開發(fā)的空間機(jī)器人共享系統(tǒng);北京航空航天大學(xué)開發(fā)的基于Internet的遠(yuǎn)程控制系統(tǒng)等,都是機(jī)器人遠(yuǎn)程控制系統(tǒng)的典型范例。
當(dāng)前遠(yuǎn)程控制系統(tǒng)模型基本都是基于互聯(lián)網(wǎng)點對點單一控制,當(dāng)機(jī)器人遇到復(fù)雜環(huán)境或者需要多機(jī)器人協(xié)作的時候,這種控制方式就顯得力不從心。基于無線局域網(wǎng)的控制方式能夠方便的把單一機(jī)器人擴(kuò)展為機(jī)器人組并使之協(xié)調(diào)動作,同時保證數(shù)據(jù)傳輸?shù)募皶r性和穩(wěn)定性。因此本課題正是要在實驗室現(xiàn)今所具有的軟硬件條件的基礎(chǔ)上,設(shè)計一套基于無線局域網(wǎng)的機(jī)器人控制系統(tǒng),使之能半脫離主控端(PC),自主完成一些簡單動作,通過TCP/IP協(xié)議中的Socket(套接字)編程,使上位機(jī)(PC)能對機(jī)器人進(jìn)行簡單控制指令的遙操作,利用人類的高級智能和機(jī)器人的低級智能,實現(xiàn)人監(jiān)控下的移動機(jī)器人半自主運動。
1 硬件環(huán)境
整套硬件設(shè)備圖如圖1所示,
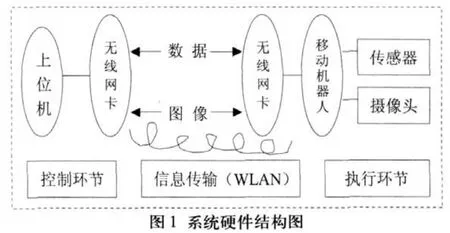
上位PC機(jī)通過無線網(wǎng)卡與下位機(jī)器人進(jìn)行無線通訊,為了保證兩個車間之間信號質(zhì)量、實現(xiàn)對移動機(jī)器人的遠(yuǎn)程無線控制,在兩個車間中間增加了無線路由器,從而加強(qiáng)了信號強(qiáng)度、擴(kuò)展了信號無線傳輸距離。
車載PC采用威盛 EPIA-P700 系列 Pico-ITX 嵌入式主板,擴(kuò)展接口多,尺寸小,功耗低,采用嵌入式主板一方面節(jié)省了開發(fā)時間,另一方面增加了系統(tǒng)的穩(wěn)定性,在此主板上自行添加了視覺傳感器和超聲波傳感器,豐富移動機(jī)器人各方面的功能。
2 系統(tǒng)設(shè)計
整個機(jī)器人系統(tǒng)可分為無線通信模塊,機(jī)身控制器模塊,電機(jī)控制器及驅(qū)動模塊,傳感器及圖像采集模塊。各個模塊結(jié)構(gòu)關(guān)系圖如圖2所示。
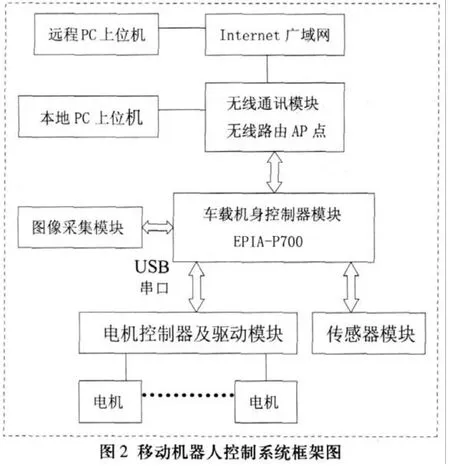
從圖中可以看出機(jī)身控制器模塊是整個系統(tǒng)的核心,也就是機(jī)器人的大腦部分,一方面通過無線模塊與上位機(jī)進(jìn)行通訊,接受上面的指令,同時又通過自身的串口接口把收到的控制指令發(fā)送給下一層的控制器,從而對電機(jī)進(jìn)行控制,另一方面接收圖像采集模塊傳送過來的視頻信息經(jīng)過處理反饋給上位機(jī),使主控端能時時刻刻了解移動機(jī)器人所處的環(huán)境。
采用這種模塊化分布式控制的優(yōu)點在于,控制系統(tǒng)的每一層,每一個控制模塊幾乎都是相互獨立的,屬于層層調(diào)用模式,當(dāng)出現(xiàn)問題時,很容易就找出是哪一部分出錯。同時也方便了系統(tǒng)移植,任何一個模塊都可以移植到其他系統(tǒng),只需改變與新系統(tǒng)相應(yīng)的底層函數(shù)即可。
3 無線通信系統(tǒng)
車載機(jī)身控制器采用小型嵌入式控制主板,通過一塊無線網(wǎng)卡與無線路由及其上位控制PC機(jī)構(gòu)成無線局域網(wǎng)環(huán)境。
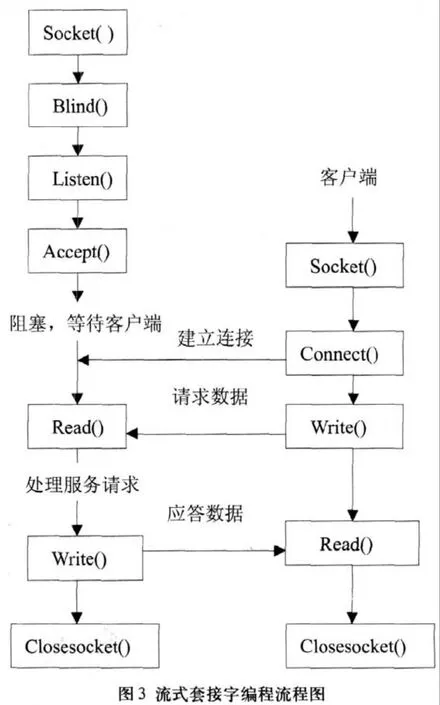
由于實現(xiàn)移動機(jī)器人遠(yuǎn)程控制的任務(wù)主要是數(shù)據(jù)傳輸,所以在上位PC機(jī)與機(jī)身控制器無線通信采取Socket(套接字)通信方式,根據(jù)傳輸數(shù)據(jù)類型的不同,套接字可分為面向連接的數(shù)據(jù)流套接字(stream sockets)和無連接的數(shù)據(jù)報套接字(datagram sockets)兩種類型。本系統(tǒng)中我們采取面向連接的數(shù)據(jù)流式套接字,其編程模型如圖3所示。
在使用面向連接流式套接字通信時,應(yīng)注意先打開服務(wù)器端,否則當(dāng)客戶端連接時將會出現(xiàn)錯誤。通信流程如圖3所示,車載機(jī)身控制器作為通信服務(wù)器端,啟動后首先調(diào)用socket()建立一個套接字,然后調(diào)用bind()將該套接字和本地網(wǎng)絡(luò)地址聯(lián)系在一起,再調(diào)用listen()使套接字做好偵聽的準(zhǔn)備,并規(guī)定它的請求隊列的長度,之后就調(diào)用accept()來接收PC客戶機(jī)的連接。而遠(yuǎn)程PC機(jī)在啟動建立套接字后就可調(diào)用connect()和服務(wù)器建立連接。連接一旦建立,機(jī)身控制器和遠(yuǎn)程用戶PC機(jī)之間就可以通過調(diào)用系統(tǒng)定義的子功能函數(shù)send()和recv()來通過無線網(wǎng)絡(luò)發(fā)送和接收數(shù)據(jù)了。
4 機(jī)器人控制通信系統(tǒng)
在機(jī)身控制器接收到遠(yuǎn)程上位機(jī)發(fā)來的指令(具體行走路線或步態(tài))將其保存,當(dāng)數(shù)據(jù)接收完畢后關(guān)閉Socket,將其轉(zhuǎn)發(fā)給下位電機(jī)控制器,由電機(jī)控制器對其解釋和執(zhí)行,由機(jī)身控制器發(fā)送給電機(jī)控制器數(shù)據(jù)傳輸流程圖如圖4所示:
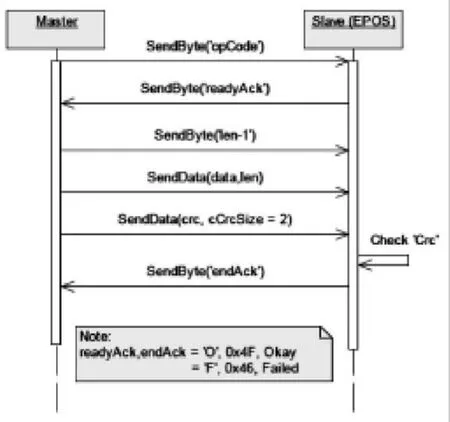
圖4 機(jī)器人控制系統(tǒng)數(shù)據(jù)傳輸流程圖
在進(jìn)行機(jī)身控制器與電機(jī)控制器之間的串口通信之前,首先要對串口進(jìn)行設(shè)置,在此我們調(diào)用電機(jī)控制器底層已有的函數(shù)庫,
VCS_OpenDevice(...,...,...,...,...) 打開設(shè)備,初始化用戶數(shù)據(jù);
VCS_OpenDeviceDlg (…) 初始化RS232串口,并顯示現(xiàn)有可用端口;
VCS_SetProtocolStackSettings (…,…,…) 初始化串口通信的波特率和超時;
VCS_ClearFault (…,…,…) 清除錯誤信息;
…
…
…
VCS_CloseAllDevices(…,…,…) 關(guān) 閉 所 有 端口,并解除對其的綁定;
當(dāng)串口協(xié)議設(shè)置完成以后,機(jī)身控制器便可與電機(jī)控制器進(jìn)行串口通信,傳送控制指令使機(jī)器人移動或做其他動作。
5 結(jié)束語
基于無線局域網(wǎng)的移動機(jī)器人遠(yuǎn)程控制系統(tǒng)的應(yīng)用,使機(jī)器人擺脫了對上位控制PC端在地域上的依賴,機(jī)器人在工作中,遠(yuǎn)程控制人員可時時刻刻觀察機(jī)器人的工作狀態(tài),并對工作環(huán)境改變或突發(fā)事件對機(jī)器人進(jìn)行實時控制及處理,提高了移動機(jī)器人的靈活性,與此同時本方案采取了小巧嵌入式主板,增強(qiáng)了機(jī)器人自處理信息的速度,提高了感知環(huán)境的能力。基于分布式模塊化的思想增強(qiáng)了機(jī)器人各部件的可移植性。因此該方案具有廣闊的應(yīng)用前景。
6 本文作者創(chuàng)新點
本系統(tǒng)采用可重構(gòu)分布式控制系統(tǒng),使各個模塊相互獨立,有較好的移植性和擴(kuò)展性,同時系統(tǒng)基于無線局域網(wǎng)保證了穩(wěn)定快速的傳輸速度,實現(xiàn)了機(jī)器人在人的控制下半自主式移動。
[1] 汪曉平,鐘軍.Visual C++網(wǎng)絡(luò)通信協(xié)議分析與實現(xiàn)[M].北京:人民郵電出版社,2003.
[2] 易君.Visual C++.NET網(wǎng)絡(luò)編程[M].北京:中國鐵道出版社,2003.
[3] Jim Geier.無線局域網(wǎng)(王群、李馥娟譯)[M].北京:人民郵電出版社,2001.
[4] 孫波,李文鋒,李斌,楊小鑄.基于無線網(wǎng)絡(luò)的嵌入式機(jī)器人控制系統(tǒng)[J].微計算機(jī)信息,2008,9.
[5] 付二寅.基于WLAN的移動機(jī)器人遠(yuǎn)程控制系統(tǒng)研究[D].西安:西安理工大學(xué),2007.
[6] maxon EPOS控制器編程手冊[Z] .2007,8.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
北京航空航天大學(xué)學(xué)報(2022年6期)2022-07-02 01:59:12
四川輕化工大學(xué)學(xué)報(自然科學(xué)版)(2021年3期)2021-08-30 06:37:02
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
智能系統(tǒng)學(xué)報(2015年4期)2015-12-27 09:38:35
