導(dǎo)彈中末段制導(dǎo)導(dǎo)引律轉(zhuǎn)換研究*
2010-08-11 05:27:16蔡海超趙海濤
艦船電子工程 2010年5期
趙 東 蔡海超 趙海濤
(海軍裝備部駐上海地區(qū)軍事代表局1) 上海 201206)(92721部隊(duì)2) 舟山 316000)
1 引言
反艦導(dǎo)彈在飛行過程中,常用的經(jīng)典導(dǎo)引方法有追蹤法、平行接近法和比例導(dǎo)引法等。其中追蹤法分為純追蹤法和常值前置角追蹤法,這兩種方法都存在比較嚴(yán)重的缺陷,即使在攔截非機(jī)動(dòng)目標(biāo)時(shí),也不能保證直接命中。平行接近法是一種理想的導(dǎo)引方法,然而平行接近法需要精確已知目標(biāo)的飛行狀態(tài),在實(shí)際中實(shí)現(xiàn)十分困難。比例導(dǎo)引是一種介于追蹤法和平行接近法之間的制導(dǎo)方法,攔截非機(jī)動(dòng)目標(biāo)時(shí)彈道性能好,脫靶量小,而且易于工程實(shí)現(xiàn),因此受到普遍重視。然而當(dāng)存在目標(biāo)機(jī)動(dòng),特別是當(dāng)目標(biāo)法向機(jī)動(dòng)過載接近甚至大于導(dǎo)彈法向過載能力時(shí),單純的比例導(dǎo)引律的性能會(huì)大大下降,即導(dǎo)彈法向過載過早飽和,終端脫靶量很大[1]。
為彌補(bǔ)純比例導(dǎo)引帶來的缺陷,文章對(duì)比例導(dǎo)引法進(jìn)行系統(tǒng)分析,研究并提出了一種帶有修正和可變系數(shù)的比例導(dǎo)引律,這種導(dǎo)引律綜合了平行導(dǎo)引律和追蹤法導(dǎo)引律的優(yōu)點(diǎn),避免了固定系數(shù)比例導(dǎo)引律的缺點(diǎn),最后建立仿真模型,對(duì)該比例導(dǎo)引律的優(yōu)點(diǎn)進(jìn)行了驗(yàn)證。
比例導(dǎo)引法具體有三種方式,即追蹤法、平行接近法和比例導(dǎo)引法。其中追蹤法是指導(dǎo)彈在攻擊目標(biāo)的導(dǎo)引過程中,導(dǎo)彈的速度矢量與導(dǎo)彈、目標(biāo)連線(視線)重合。這種導(dǎo)引方法一般用于攻擊低速或靜止目標(biāo)的導(dǎo)彈,或向目標(biāo)尾部發(fā)射的情況;平行接近法要求在制導(dǎo)過程中始終保持目標(biāo)視線在空間沿給定方向平行移動(dòng),即視線角速度為零。按平行接近法導(dǎo)引時(shí),導(dǎo)彈速度矢量每一時(shí)刻都指向瞬時(shí)遭遇點(diǎn),因此,平行接近法也叫瞬時(shí)遭遇點(diǎn)法。用平行接近法導(dǎo)引時(shí),由于保持目標(biāo)視線與基準(zhǔn)線的夾角為常數(shù),如保持導(dǎo)彈速度矢量前置角不變,則導(dǎo)彈的彈道就為一條直線。所以在目標(biāo)做直線運(yùn)動(dòng)情況下,用平行接近法導(dǎo)引時(shí),只要速度比保持常數(shù)(k>1),導(dǎo)彈從任何方向攻擊目標(biāo),都能得到直線彈道。
比例導(dǎo)引法要求導(dǎo)彈飛行過程中,保持速度矢量的轉(zhuǎn)動(dòng)角速度與目標(biāo)視線的轉(zhuǎn)動(dòng)角速度成給定的比例關(guān)系,導(dǎo)引方程為:θ′=kq′,式中k為導(dǎo)引系數(shù),也稱導(dǎo)航比;θ為導(dǎo)彈飛行彈道角;q為彈目視線角。另外,采用比例導(dǎo)引法時(shí),彈道初始段和追蹤法(k=1)相近,彈道末段和平行接近法(k=∞)相近。導(dǎo)彈的理想彈道的曲率介于平行接近法和追蹤法之間。追蹤法導(dǎo)引時(shí)彈道曲率最大,導(dǎo)彈的速度矢量時(shí)刻指向目標(biāo),這種導(dǎo)引方法在導(dǎo)彈接近目標(biāo)的時(shí)候會(huì)帶來極壞的彈道特性,使過載很大。但是考慮到導(dǎo)彈中段飛行中,距離目標(biāo)比較遠(yuǎn),因此目標(biāo)的機(jī)動(dòng)對(duì)導(dǎo)彈彈道影響比較小,因此這段時(shí)間內(nèi)是可以采用追蹤導(dǎo)引律的,以便于快速接近目標(biāo)。在末段時(shí),由于目標(biāo)機(jī)動(dòng)、導(dǎo)彈變速飛行,適當(dāng)提高導(dǎo)引系數(shù)k,導(dǎo)彈轉(zhuǎn)換制導(dǎo)律,這樣導(dǎo)彈的飛行彈道曲率會(huì)變小,導(dǎo)彈需用過載降低。但k值不是越大越好,如果k值很大,即使q′不大,也可能使導(dǎo)彈的需用過載很大[2]。為了保證滿意的視線角速度,比例導(dǎo)引系數(shù)存在最優(yōu)取值范圍,即k=3~6[3],這里取k=4。由于中間段可采用有效比例導(dǎo)航系數(shù)k=1的比例導(dǎo)引系數(shù),末段可采用k=4的比例導(dǎo)引系數(shù),所以本文結(jié)合追蹤法和比例導(dǎo)引法,提出了一種可變導(dǎo)引系數(shù)的比例導(dǎo)引法。
2 可變系數(shù)的比例導(dǎo)引法
2.1 彈道銜接
本文中導(dǎo)彈采取串聯(lián)式復(fù)合制導(dǎo)方式,在中段向末段的過渡過程中,導(dǎo)彈導(dǎo)引律的導(dǎo)引系數(shù)將產(chǎn)生變化,因此存在由一種制導(dǎo)方式向另一種制導(dǎo)方式的過渡問題,這種過渡是由一種引導(dǎo)方法向另一種引導(dǎo)方法的轉(zhuǎn)變,由于引導(dǎo)方法的突變,必然引起彈道軌跡的折損,以至不能擊中目標(biāo).因此,彈道的銜接和過渡顯得尤為重要。要保證兩段彈道在過渡點(diǎn)處吻合必須滿足一定的條件。設(shè)導(dǎo)彈在彈道i處的加速度為ai,在彈道j處的加速度為aj。那么兩段彈道在交接點(diǎn)處吻合的條件為:
2.2 彈道方程
描述導(dǎo)彈質(zhì)心運(yùn)動(dòng)和繞質(zhì)心運(yùn)動(dòng)的數(shù)學(xué)模型是將導(dǎo)彈視為剛體的六自由度動(dòng)力學(xué)模型,是一個(gè)非線性、變參量的數(shù)學(xué)模型,包括姿態(tài)角、攻角、側(cè)滑角、舵偏角和隨機(jī)干擾在內(nèi)的大量參數(shù),一般做法是依據(jù)具體情況將之逐漸簡(jiǎn)化以求得閉合解。通常情況下,導(dǎo)彈是在三維空間內(nèi)運(yùn)動(dòng)的,平面運(yùn)動(dòng)只是導(dǎo)彈運(yùn)動(dòng)的一種特殊情況。在某些情況下導(dǎo)彈的運(yùn)動(dòng)可近似地視為在一個(gè)平面內(nèi),例如地-空導(dǎo)彈在許多場(chǎng)合是在鉛垂面或傾斜平面內(nèi)飛行;飛航式導(dǎo)彈在爬升段和末制導(dǎo)段也可近似地認(rèn)為是在鉛垂平面內(nèi)運(yùn)動(dòng);空-空導(dǎo)彈的運(yùn)動(dòng),在許多場(chǎng)合也可看成是在水平面內(nèi)。所以在導(dǎo)彈的初步設(shè)計(jì)階段,研究、解算導(dǎo)彈的平面彈道是具有一定應(yīng)用價(jià)值的。本文將導(dǎo)彈的運(yùn)動(dòng)進(jìn)行解耦,并放在一個(gè)平面內(nèi)進(jìn)行研究,把實(shí)際三維問題轉(zhuǎn)化為兩個(gè)互相垂直平面上的二維問題。
選取慣性坐標(biāo)系的垂直平面和水平面為兩個(gè)獨(dú)立的研究平面。在這里將導(dǎo)彈和目標(biāo)放在垂直平面內(nèi)進(jìn)行分析。導(dǎo)彈截?fù)裟繕?biāo)的平面圖如圖2所示,圖中水平線為參考線,Vm為導(dǎo)彈的速度,Vt為目標(biāo)速度,q為彈目視線角,βm為導(dǎo)彈的前置角,βt為目標(biāo)的前置角,θm 為導(dǎo)彈的飛行彈道角 ,θt為目標(biāo)的飛行航跡角,r為目標(biāo)和導(dǎo)彈間的相對(duì)距離。為研究導(dǎo)彈與目標(biāo)之間的相對(duì)運(yùn)動(dòng)方程,將導(dǎo)彈運(yùn)動(dòng)速度矢量和目標(biāo)運(yùn)動(dòng)速度矢量分別沿著相對(duì)距離r方向和其法線方向分解成兩個(gè)分量。沿r方向的分量為vmcosβm,vtcosβt,沿法線方向的分量為 vmsinβm,vtsinβt。根據(jù)速度分量表達(dá)式,求得導(dǎo)彈-目標(biāo)之間的距離變化率dr/dt為:

距離旋轉(zhuǎn)角速度的變化率為:

利用相對(duì)運(yùn)動(dòng)關(guān)系和導(dǎo)引方程,可以得到以下方程組:
再根據(jù)以下導(dǎo)引律:

其中,vt,vm,θm已知。式(3)中右邊第一部分相當(dāng)于比例導(dǎo)引,第二部分作為修正量,作用相當(dāng)于追蹤法導(dǎo)引[3]。為了簡(jiǎn)化研究過程,這里取

在τ域中,導(dǎo)彈法向加速度為
目標(biāo)的法向加速度為
從這一導(dǎo)引律可以得到
又因?yàn)?θm=βm+q,有
對(duì)方程兩邊對(duì)τ求導(dǎo)數(shù),變換得到
以上方程(5)~(12)構(gòu)成了組合末制導(dǎo)系統(tǒng)的解析解表達(dá)式[4]。
彈道平滑過渡問題實(shí)際上就是由k1=1到k1=4的過渡問題。假設(shè)在時(shí)間t0處開始過渡,3s(t<3s)內(nèi)完成由k1=1到k1=4的過渡,這樣在過渡段內(nèi)k1的表達(dá)式為:

當(dāng)t>3s以后保持k1=4。由于導(dǎo)彈開始由中段向末段制導(dǎo)轉(zhuǎn)換的交接點(diǎn)處,導(dǎo)引系數(shù)k沒有發(fā)生變化,因此彈道是滿足吻合條件1的。要滿足二階平滑過渡,需要求彈道傾角的變化率在過渡點(diǎn)處相等[5]。
3 仿真分析
導(dǎo)彈制導(dǎo)系統(tǒng)的導(dǎo)引頭,無論是雷達(dá)頭還是紅外頭,他們都有一定的最小測(cè)量距離(幾十米或幾百米),當(dāng)導(dǎo)彈和目標(biāo)接近到這個(gè)距離之后,導(dǎo)引頭就停止正常工作,控制系統(tǒng)從此依其過渡過程恢復(fù)到平衡位置,導(dǎo)彈同時(shí)將根據(jù)控制舵的位置作直線彈道或曲線彈道飛行。導(dǎo)彈繞過目標(biāo)的最小距離,稱之為脫靶量。
圖3 脫靶量的平面幾何表示
下面我們分別根據(jù)舵在導(dǎo)彈運(yùn)動(dòng)最后瞬間是否處于中間位置,來討論脫靶量的計(jì)算公式。設(shè)導(dǎo)引頭停止工作時(shí)刻為ts,相對(duì)距離為rs,視線角速度為qs,考慮到導(dǎo)彈任意機(jī)動(dòng),在平面情況下,脫靶量由橫向偏差(垂直于LOS)和縱向偏差(平行于LOS)兩部分組成。
3.1 目標(biāo)與導(dǎo)彈均作勻速飛行
設(shè)導(dǎo)彈飛行速度為Vm,目標(biāo)速度為Vt,R1為導(dǎo)彈徑向飛行距離,R2為導(dǎo)彈橫向飛行距離,t為彈目相遇時(shí)導(dǎo)彈飛行時(shí)間。根據(jù)余弦定理可以得到:
根據(jù)比例導(dǎo)引律公式可以得到
因此
3.2 導(dǎo)彈目標(biāo)作變速運(yùn)動(dòng)
在實(shí)際情況中,導(dǎo)彈目標(biāo)經(jīng)常采取變速運(yùn)動(dòng)飛行,且有橫向機(jī)動(dòng),可近似認(rèn)為此種條件下脫靶量為:

其中,amy和aty分別為導(dǎo)彈和目標(biāo)的加速度在視線法向的投影,表達(dá)式為
3.3 脫靶量分析
假設(shè)目標(biāo)作正橫向機(jī)動(dòng)飛行,Vm=800m/s,Vt=340m/s,at=80m/s2,am=0m/s2,r0=3000m,βt=-90°,βm=-38°,θt=17°,θm=70°。當(dāng) b=3 時(shí),目標(biāo)加速度取不同值時(shí),導(dǎo)彈采用比例導(dǎo)引(a=1,a=3)和組合導(dǎo)引以及變系數(shù)導(dǎo)引方式的脫靶量比較如表1所示。
表1 比例導(dǎo)引和組合導(dǎo)引仿真結(jié)果比較
3.4 彈道分析
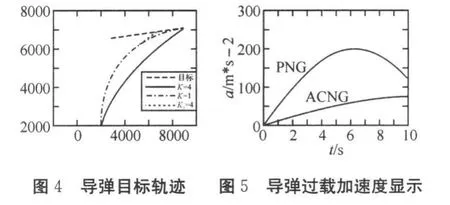
假設(shè)導(dǎo)彈起點(diǎn)位置為(2000,0),目標(biāo)作直線運(yùn)動(dòng)。圖4描述了當(dāng)k=1,k=4,以及中末端交班采取可變系數(shù)(k=1,k1=4)的三種比例導(dǎo)引律的情況,圖4表明彈道銜接過渡平滑,并且縮短了彈-目相遇時(shí)間,圖5表示導(dǎo)彈在整個(gè)相遇過程中,明顯降低了需用過載。
4 結(jié)語
本文對(duì)純比例導(dǎo)引法入手,提出了一種新型的組合制導(dǎo)律。通過數(shù)字仿真結(jié)果可以看出,本文提出的組合制導(dǎo)律充分吸收了比例導(dǎo)引系數(shù)在不同取值時(shí)彈道特性的優(yōu)勢(shì),消除了固定比例導(dǎo)引系數(shù)的缺點(diǎn),在對(duì)付機(jī)動(dòng)目標(biāo)可以大大降低過載和脫靶量。因此,這種制導(dǎo)律在實(shí)際運(yùn)用中是十分值得推廣運(yùn)用的。但是,導(dǎo)引系數(shù)仍然是影響該比例導(dǎo)引法優(yōu)劣的關(guān)鍵因素,因此更進(jìn)一步討論導(dǎo)引系數(shù)的取值是非常有必要的。另外,對(duì)于彈道交接時(shí)間的可行性也是需要在實(shí)際運(yùn)用中解決的問題。
[1]程國(guó)采.戰(zhàn)術(shù)導(dǎo)彈導(dǎo)引方法[M].北京:國(guó)防工業(yè)出版社,1996
[2]孟秀云.導(dǎo)彈制導(dǎo)與控制系統(tǒng)原理[M].北京:北京理工大學(xué)出版社,2003
[3]劉興堂.精確制導(dǎo)、控制與仿真技術(shù)[M].北京:國(guó)防工業(yè)出版社,2006
[4]張合新,孟飛,汪立新.組合末制導(dǎo)律及其仿真研究[J].火力與指揮控制,2003(1):33~36
[5]羅喜霜,張?zhí)鞓?多用途導(dǎo)彈中末段交班研究[J].彈道學(xué)報(bào),2001(4):47~50
[6]陳佳實(shí).導(dǎo)彈制導(dǎo)和控制系統(tǒng)的分析與設(shè)計(jì)[M].北京:宇航出版社,1989
