三相永磁同步電機雙閉環調速控制系統的設計——基于TMS320LF2407A和AT89C51
2010-08-10 02:56:08王朕劉陵順
船電技術 2010年9期
王朕 劉陵順
(海軍航空工程學院控制工程系,山東煙臺 264001)
1 引言
由于無電刷,相對于繞線式轉子同步電機,永磁轉子同步電機不僅克服了其致命缺點,還具有體積小、重量輕、慣性低、效率高、轉子無發熱等優點,因此,廣泛應用于武器裝備、工業機器人、數控機床、柔性制造技術、各種自動化設備等領域,其轉速控制系統性能的優劣直接決定了設備性能的發揮。
隨著計算機進入控制領域及新型的電力電子功率元器件的不斷出現,使采用全控型電力電子器件進行空間矢量(SVPWM)控制方式已成為交流電機控制的主流。目前,這種控制方式已成為交流電動機數字控制的基礎。
相對于其他控制器,DSP具有運算速度高、自己產生有死區時間的PWM輸出、實現諸如模糊控制等復雜的算法容易、外圍硬件少等優點,因而廣泛用于電機的數字控制。本文采用TMS320LF2407A DSP芯片和AT89C51單片機為核心設計了針對三相永磁同步電機的全數字調速控制系統,實驗結果表明該系統具有實時顯示、數據存儲、動態響應快、控制精度高、抗干擾性強等優點。
2 TMS320LF2407A簡介
TMS320LF2407A主要包括算術邏輯運算單元CALU、寄存器集、輔助算術邏輯單元ARAU、乘法器、乘法移位器、累加器、加法移位器、時鐘鎖相環電路、兩個完全等同的事件管理器A、B(包括通用定時器、比較單元、捕獲/正交編碼器脈沖電路)、內部 A/D轉換器、雙串口、看門狗、CAN總線電路單元等主要部分。
TMS320LF2407A采用先進的哈佛結構,流水線作業,在30 MHz的內部時鐘頻率下,指令周期僅為33 ns。由于其內部具有硬件乘法器,一條16乘16位的算法在一個周期內即可完成,僅需33 ns。TMS320LF2407A內部具有時鐘鎖相環電路,從而可以通過軟件編程來產生內部所需要的高頻脈沖信號。
TMS320LF2407A內部存儲器中包含兩類RAM塊,一類為DRAM,另一類為SRAM。對DRAM而言又劃分為三個RAM塊B0、B1、B2,容量依次為 256字、256字、32字。這些 RAM全部允許在一個指令周期內訪問兩次,因此在數據處理能力上有顯著的增加。同時,B0塊還可以通過程序動態地配置為數據存儲器或程序存儲器區。若配置為程序區可在上電時把浮點算法子程序或者數據表從外部慢速EPROM裝入此區域,從而緩解高速處理器與慢速外設之間的矛盾,這對提高控制系統的動態性能有很大幫助。TMS320LF2407A內部含有內嵌采樣保持的10位精度、高速A/D轉換器,轉換時間最短為500 ns(采樣保持+轉換時間)。除此之外TMS320LF2407A還有豐富的、功能強大的中斷系統以及常用的I/O接口,這些都使得設計調速控制系統時硬件電路得到簡化[1,2]。
3 系統硬件設計
基于TMS320LF2407A三相永磁同步電機雙閉環調速控制系統硬件框圖如圖1所示。系統主電路采用交-直-交電壓型變頻器,功率器件采用智能功率模塊IPM,該模塊包含有6個IGBT、6個與 IGBT反并聯的續流二極管。控制電路部分由 AT89C51單片機控制單元、TMS320LF2407A控制器單元、電流檢測電路、電壓檢測電路、轉速檢測電路、過流保護電路、液晶顯示電路和鍵盤輸入接口電路等模塊組成。
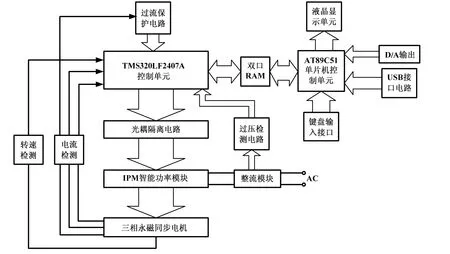
圖1 系統硬件框圖
3.1 AT89C51單片機控制單元
AT89C51控制單元主要完成以下功能:一是通過鍵盤輸入接口電路完成對給定轉速的設定;二是通過液晶顯示電路完成對給定轉速、電機啟動時轉速和達到穩態時轉速的顯示;三是完成對雙口 RAM中存儲數據的讀取,并將讀取的數據通過USB接口電路導入上位機或通過D/A輸出電路輸入到模擬設備[3,4]。
其中,液晶顯示單元采用中文圖形兩用型液晶顯示模塊OCMJ4X8B-2;鍵盤采用了矩陣式按鍵鍵盤,可以通過鍵盤調用單片機中預設的漢字,可以輸入數字(用來設置轉速);雙口模塊用來存儲TMS320LF2407A采集的變量波形數據[5,6]。
3.2 TMS320LF2407A控制單元
TMS320LF2407A控制單元的電路原理圖如圖2所示。該控制單元電路主要包括光耦隔離電路、轉速檢測電路、電流檢測電路[7]和電壓檢測電路,分別完成對IPM的驅動、轉速檢測與控制、過流保護、過壓和欠壓保護等功能。
光耦隔離電路由6片東芝公司的TLP127及相應的限流電阻組成,主要完成TMS320LF2407A與IPM智能功率模塊的電氣隔離,并將輸出的PWM信號放大。
轉速檢測電路采用歐姆龍 1024原旋轉型線編碼器 E6B2-CWZ6C,編碼器輸出的脈沖經過TMS320LF2407A內部 4倍頻后可以實現每轉4096個脈沖,從而保證了轉速的精度。根據采樣得到的數據與給定數據比較,調整DSP輸出驅動脈沖的寬度,從而調節交流電機的轉速。
電流采樣電路采用三片霍爾電流傳感器CN61M/TBC25C04;一路將檢測到的直流母線上瞬時電流值送入過流保護電路,當其值大于過電流值時,相應過流保護電路動作產生保護信號,關斷PWM信號的輸出;另外兩路檢測流過電動機的電流,通過變換改變DSP輸出的驅動脈沖,進而保持電機的轉速不變。本文設計的控制系統中,TMS320LF2407A采用了ADCIN00、ADCIN01和 ADCIN02三路通道來采集電機A相、B相和直流母線的電流,
直流母線的采樣電壓通過 ADCIN03通道輸入DSP,根據采樣得到的數據,在電壓超過設定的上下限值的時候,DSP關斷PWM脈沖的輸出,從而實現過壓和欠壓保護功能。
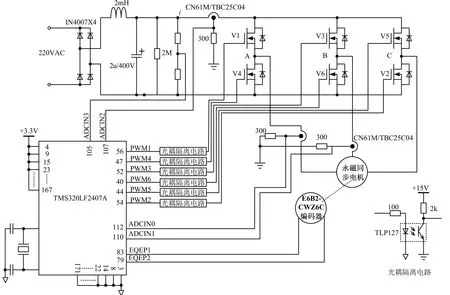
圖2 TMS320LF2407A控制單元電路原理圖
4 系統軟件設計
4.1 閉環調速控制的原理
本文設計的雙閉環調速控制系統的原理框圖如圖3所示。其中,給定轉速由鍵盤輸入接口電路輸入AT89C51單片機控制系統,速度PI調節、電流 PI調節和轉速反饋量的計算由TMS320LF2407A編程實現。測得的電機轉速通過 AT89C51控制系統輸出到液晶顯示單元上實時顯示[8]。
對于常用的三相凸極式轉子永磁同步電動機,其轉矩方程如下:

其中:ψf指轉子磁鋼在定子上的耦合磁鏈,它只在d軸上存在;P指轉子的磁極對數。
因為是永磁轉子,ψf是一個不變的值,所以式(1)說明了只要保持is與d軸垂直,就可以像直流電動機控制那樣,通過調整電流iq來控制轉矩,從而實現三相永磁同步伺服電動機的控制參數的解耦,實現三相永磁同步電動機轉矩的線性化控制[9],也就實現了轉速的線性化控制。
具體工作原理如下:
通過電流傳感器測量逆變器輸出的定子電流iA、iB,經過DSP的A/D轉換器轉換成數字量,并利用式iC=-(iA+ iB)計算出iC。通過Clarke變換和Park變換將電流iA、iB、iC變換成旋轉坐標系中的直流分量isq、isd,isq、isd作為電流環的負反饋量。利用編碼器測量電動機的機械轉角位移θm,并將其轉換成電角度 θe和轉速 n。θe用于參與Park變換和逆變換的計算,n作為速度環的負反饋量。
給定轉速 nref與轉速反饋量 n的偏差經過速度PI調節器,其輸出作為用于轉矩控制的電流q軸參考分量 isqref。isqref和 isdref(等于零)與電流反饋量 isq、isd的偏差經過電流 PI調節器,分別輸出 Odq旋轉坐標系的相電壓分量 Vsqref和 Vsdref。Vsqref和Vsdref再通過Park逆變換轉換成Oαβ直角坐標系的定子相電壓矢量的分量 Vsαref和 Vsβref。當定子相電壓矢量的分量 Vsαref、Vsβref和其所在的扇區數已知時,就可以利用電壓空間矢量SVPWM技術,利用DSP產生PWM控制信號來控制逆變器。
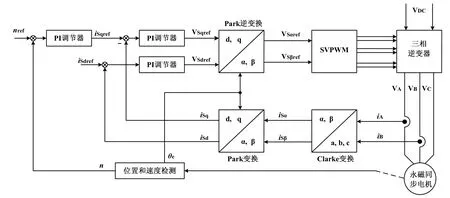
圖3 雙閉環調速控制系統框圖
4.2 程序流程圖
AT89C51單片機控制系統上電后,首先通過鍵盤輸入接口輸入電路給定轉速,單片機將給定轉速存儲在雙口 RAM中。同時,給定轉速通過單片機 P0口輸出到液晶顯示單元的驅動控制芯片SED1520,由SED1520驅動 OCMJ4X8B-2顯示轉速,轉速的顯示范圍為0~9999 r/min。然后,通過鍵盤來確定是否要對相關變量采樣并存儲。該部分程序流程圖如圖4(a)所示。其次給TMS320LF2407A DSP控制系統上電,運行初始化程序完成初始狀態的設定(包括對相關變量采樣數據存儲等)。DSP控制系統對電機轉速和電樞電流采樣,與給定值進行比較,若達到設定轉速則循環運行,當給定轉速改變時,進入中斷處理子程序。主程序流程圖和中斷處理子程序流程圖分別如圖4(b)和(c)所示[10]。
5 實驗結果
對電機定子電流變量和轉速反饋變量進行采樣,通過USB接口電路轉移到上位機;在上位機上繪出的波形如圖 5(a)上下兩個波形所示,波形的數據點為2048。從實驗波形上看,電機在很小的時間內達到設定的轉速值1000 r/min。在啟動過程中,定子電流由于PWM控制,產生一定的波動,當轉速達到設定值后,定子電流也很快趨于穩定。
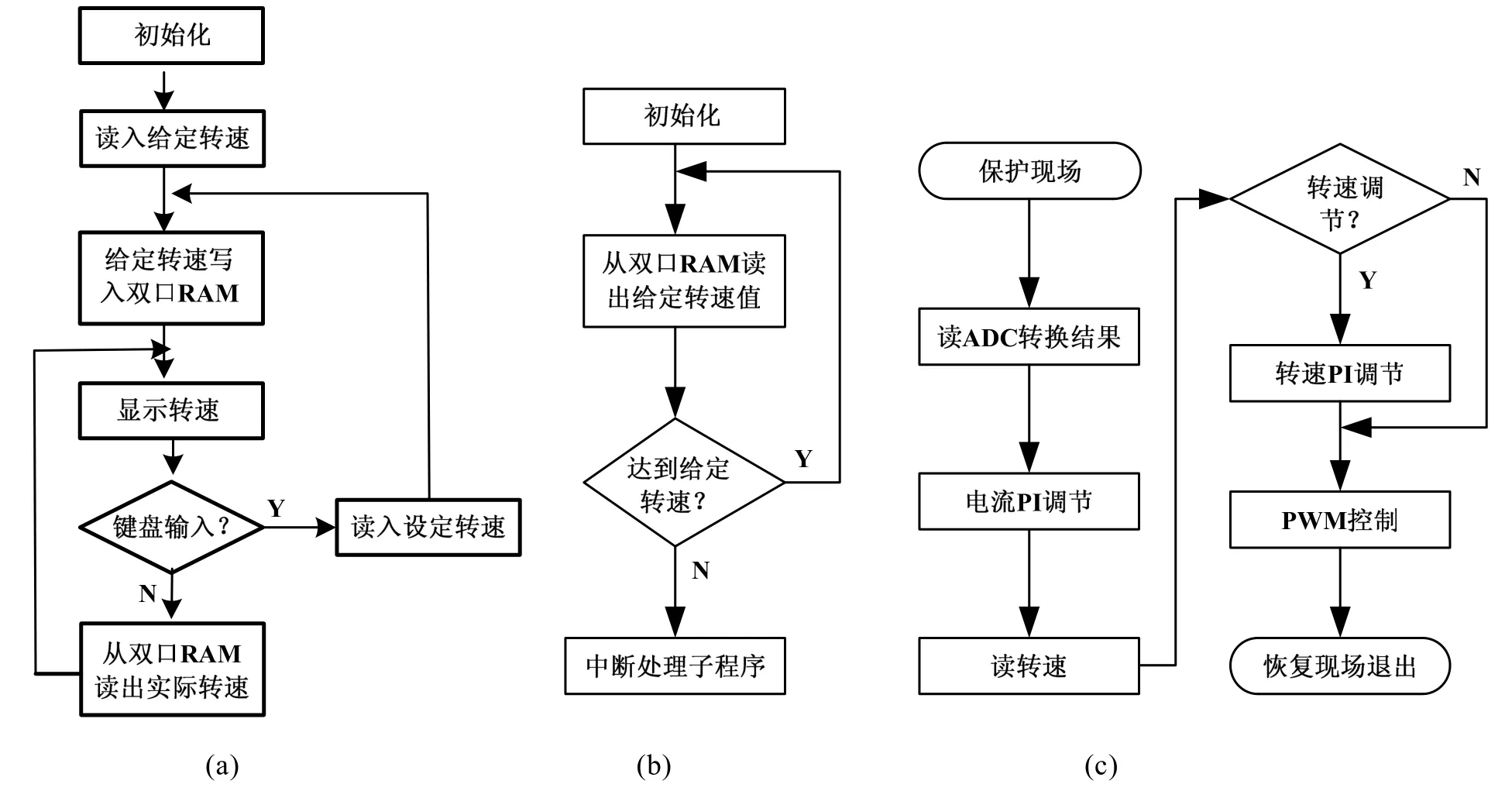
圖4 程序流程圖
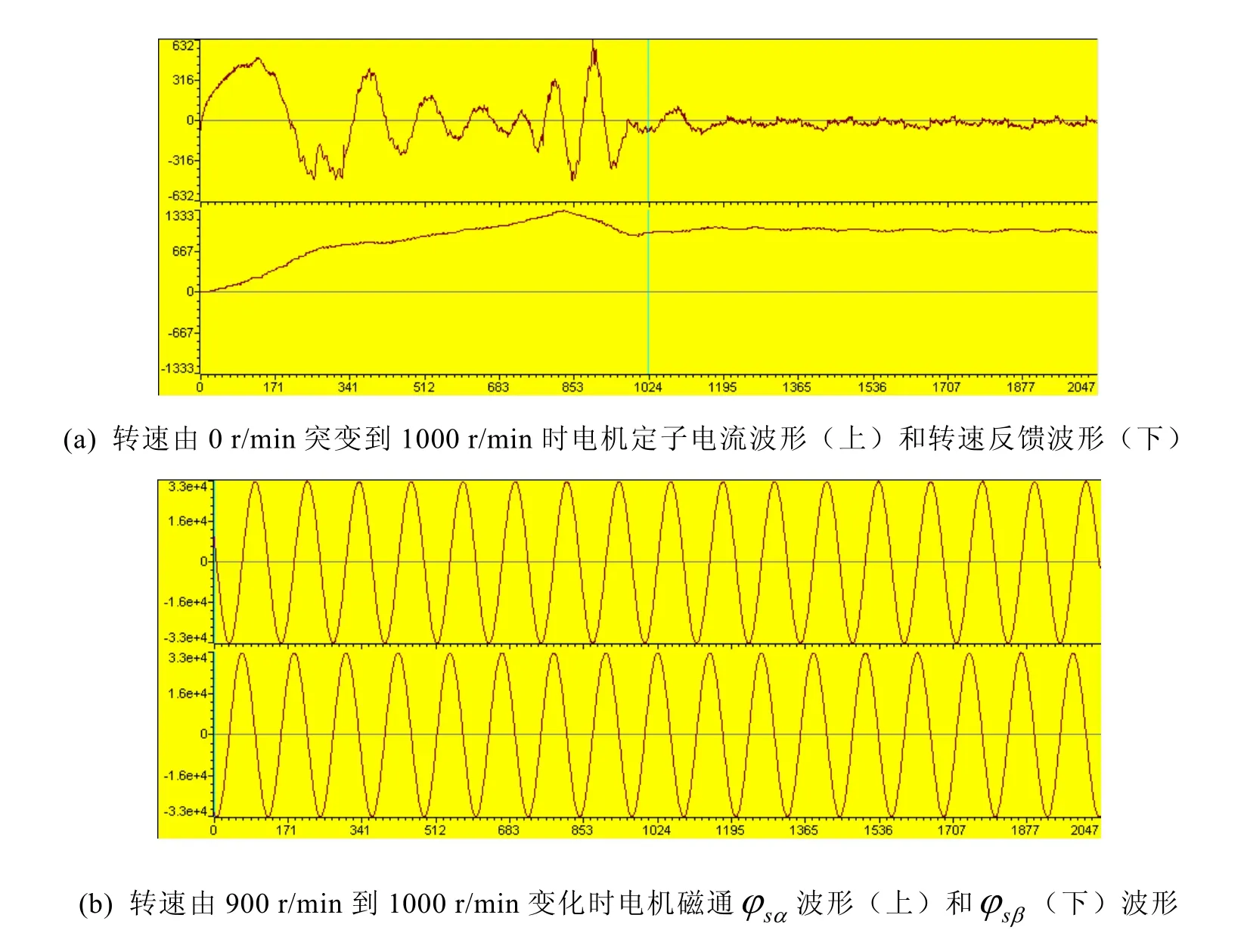
圖5 實驗波形
當電機運行時,改變運行速度時,對電機磁通φsα和φsβ進行數據采集,轉移到上位機后繪出的磁通波形如圖5(b)所示。從實驗波形上可以看出,當電機轉速發生變化時,電機的磁場變化幅度可以忽略,因此電機轉速的變化也可忽略,即設計的控制系統對轉速的控制精度很高,完全達到了設計要求。
6 結束語
本文采用以TMS320LF2407A為SVPWM控制的核心,以AT89C51控制單元為電機轉速控制管理核心的三相永磁同步電機電流、轉速雙閉環調速控制系統具有數據存儲、實時顯示等功能,實驗結果表明該控制系統具有動態響應快,控制精度高等優點。實踐證明,該系統還具有較好的抗干擾性。該系統對其他交流電機調速系統的設計和實現具有也具有較高的指導意義。
:
[1]王曉明, 王玲. 電動機的 DSP控制. 北京: 北京航空航天大學出版社, 2004年7月: 1~17.
[2]鄭紅, 隋強強, 周星. DSP應用系統設計實例. 北京:北京航空航天大學出版社, 2008年1月: 45~76.
[3]王朕, 劉學鋒, 劉陵順. 基于 AT89C51電機轉速測量儀的設計與實現. 四川兵工學報, 2009.(5).
[4]白雷杰, 趙志偉, 彭立山. 基于單片機 P0口的片外數據存儲器擴展. 電子設計工程, 2010. (3).
[5]唐宗軍, 楊光, 王維, 欽蘭云. 基于 DSP和單片機的高速數據采集與處理系統. 儀器儀表學報, 增刊,2004, 25(4).
[6]田艷兵, 崔光照. TMS320LF2407數字信號處理芯片與PC機間的串行通訊. 嵌入式論文集, 2003.9.
[7]王曉明, 王玲. 電動機的 DSP控制. 北京: 北京航空航天大學出版社, 2004年7月: 37~67.
[8]鄭紅, 隋強強, 周星. DSP應用系統設計實例. 北京:北京航空航天大學出版社, 2008年1月: 108~114.
[9]吳紅星, 謝宗武, 張強. 基于 DSP的電動機控制技術. 北京: 中國電力出版社, 2008年8月: 283~288。
[10]周毅, 徐興, 徐德炳. TMS320LF2407在低速小角度低電壓直流無刷電機控制中的應用. 電子測量與儀器學報, 2004年增刊.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27