單片機在鐵路橋梁撓度監測中的應用
2010-08-07 08:41:42華勇,盧海,張濤
鐵路計算機應用 2010年2期
華 勇,盧 海,張 濤
(成都鐵路局貴陽電務段,貴陽550005)
橋梁的撓度與橋梁的承載能力及抵御地震等動荷載的能力有密切的關系,因此橋梁動靜撓度測量方法的研究和儀器設備的開發研制,對于橋梁承載能力的檢測和橋梁的防震減災有著重要的意義 。
1 目的及創新
成都鐵路局管內多為山區鐵路,橋梁眾多,準確掌握承重桁架的變形情況,對橋梁的運行狀況進行健康監測,不但可以有效預防突發性災難,減少損失確保基礎設施與使用者的安全,還可為優化設計提供依據,更可能據此制訂維修計劃。開發使用ARM處理器和線陣CCD很好地解決了這一問題。
線陣CCD是一種光電耦合元件,它在3 cm左右的長度上集成數千個光敏單元。根據其精密特性,設計一套光電液壓裝置,可實現桁架梁的遠程位移檢測。高精度的光電裝置選擇LPC2200作為核心單片機與之配套,用以完成整個系統的控制工作。
2 系統設計
2.1 系統整體結構
該系統整體為3層結構,如圖1。

監控中心使用LABVIEW開發出可視化平臺,完成人機交互。工控機和R3000系統之間通過公用以太網連接,而R3000系統和下位機則通過RS-485總線連接,形成分布較廣的監控網絡,有利于同時對大橋的多個點實時監測。
監控中心通過以太網向R3000發送控制命令并接收下位機的數據,R3000收到監控中心的命令后,對下位機發送相應的操作指令,從而控制多個下位機進行數據采集。
每個下位機系統都有一個獨立的地址(相對于同一條RS-485總線而言),R3000對下位機發送指令時,總線上的每一個下位機都可以收到。下位機通過識別指令中的地址信息來確認指令是否有效,從而做相應的工作,并返回工作結果。系統的總線控制權完全由上位機掌握,實現了一主多從的通信方式,免去了總線仲裁、沖突檢測等繁瑣過程,提高了總線的利用率。
2.2 下位機系統結構
整個下位機包括CCD光學設備、機械傳動裝置、電子設備。若干個下位機通過485總線串接在一起組成一組,通過中間上位機的控制,完成一個測試點的撓度監測工作。
由下位機電子設備產生CCD的驅動脈沖,根據液面的變化,CCD輸出相應的信號,經過單片機處理后轉換成數據發給中間上位機。上位機使用R3000實現數據包的收發。
下位機采用停等協議實現總線仲裁。整個系統一經上電,各個下位機開始CCD數據采集,并一直處于總線偵聽狀態,根據總線上命令進行相應的操作。
3 系統功能綜述
3.1 系統設計原理
在CCD驅動系統的實現中,使用了單片機驅動法。因CCD高精度感光元件,具有高靈敏性,所以驅動電路設計時需要考慮許多方面。包括四路驅動脈沖的產生、整形、調理以及門電路的延遲等因素。
光學系統設計,使用了CCD、鏡頭、光源3部分中心線定位法。為了使系統的精度達到最優,使用了物距象距移動法最終確定光學系統的定位。
控制系統設計中,下位機系統選擇LPC2200芯片,免去了微處理器與A/D轉換器之間的接口電路和時序控制電路,硬件電路設計更加簡潔,芯片的外圍元件非常少,硬件的可靠性得到了提高。外圍電路只需一套單片機最小子系統即可。
機械系統設計,使用橋梁帶動水箱,水箱帶動液面移動的方法反映撓度變化。由于系統靈敏度高,需要考慮很多因素,例如周圍環境溫度的變化、傳動系統的響應靈敏度、不同的行車周期,以及橋梁的共振等。通過對數種不同的材料進行上百次的測試,分析大量的數據,最終確定了一種最合理的方法。
使用單片機開發CCD時序驅動電路的設計方法靈活,設計思想、時序清晰,保證了其正確性。另外,使用這種方法還減小了電路板的面積,提高了系統的穩定性,適用于微型化儀器中。
3.2 機械系統設計
利用連通器兩邊液面等高的原理,通過液面的變化來反映橋梁的形變是一種可靠的方法。由于液體在管子里以波的速度傳導,所以可以實時顯示橋梁的振動情況。
在橋梁的頂端放置一水箱,在100 m遠處放置一套CCD光學系統。在光學系統箱內部設計一段細玻璃管,通過100 m長的粗管與水箱相連。如果橋梁發生形變產生位移,則細玻璃管內對應的液面也因此上下移動。通過液面的移動來反映橋梁的撓度。
系統所有管子里都是非透明的液體。在玻璃管背后用一段發光二極管照亮整段玻璃管。有液體的部分不透光,而沒有液體的部分則透光。這些光透過光學鏡頭打在CCD靶面上,從而使CCD輸出相應的電荷信號。
由于不同的傳導管的構造及內壁的阻力不同,以及液體在共振情況下發生抖動,還另需考慮各種環境條件對實際測量精度的影響。
3.3 光學裝置設計
基于遠程位移的特點,在對光學系統優化設計時,應主要考慮整個光路系統和CCD器件的共軸(即準直)問題。精確地測量CCD、鏡頭及光源軸向確定光學系統尺寸,使光學系統軸向一致,并垂直于CCD光敏面,使待測目標的位移方向與線陣CCD光敏元的排列方向均一致,從而組成一個共軸系統,也解決了檢測系統的光路準直問題。
CCD有效象元長度為30.2 mm,對應的視場為156 mm,放大倍率約為1∶5。在整個檢測系統測量精度高低的確定上,光學系統放大倍率與線陣CCD光敏單元尺寸共同決定了測量精度的高低。為了提高精度,可提高光學系統的放大倍率β。在物距一定時,可以通過提高物鏡的焦距來提高測量精度,可以在電路處理部分使用更高頻率的時鐘脈沖采樣,可以將CCD測量的精度值提高近一個數量級。因此,基于CCD的遠程位移自動在線檢測系統并沒有只在光學系統設計上進行優化,還在硬件上采用具有流水線結構的高速LPC2200芯片,增加了數據采集的速度,實現了實時高頻率數據采集。
3.4 網絡系統設計
這套系統需要對多達22個點進行撓度檢測,采用網絡控制技術,可將眾多設備有機地連成一體,以保證整個系統安全可靠地運行。用RS-485總線方式組成整個傳感器網絡,可以實現系統的多機通訊。
3.5 軟件設計
為了實時準確地實現串行通訊,系統采用了一套完整的通信協議。
開始每個下位機處于總線偵聽狀態。當串口收到指令時,將接收緩沖區有效標志置位,主循環得知緩沖區內有指令到來,便對緩沖區數據進行CRC校驗,由于CRC校驗的檢錯率近乎100%,所以只要CRC校驗通過,便認為收到的數據是正確的。RS-485總線的結構特殊,對于一條指令,總線上所有的下位機都能夠收到,即使這條指令不是傳達給該下位機的,這就需要每個下位機都有一個唯一地址,在收到正確數據后還要對其中地址部分進行核對,如果地址正確,則取出指令部分,進行分析和執行,否則丟棄該數據。最后,指令執行完畢后,下位機將指令執行的結果返回給上位機。
軟件總體流程如圖2。
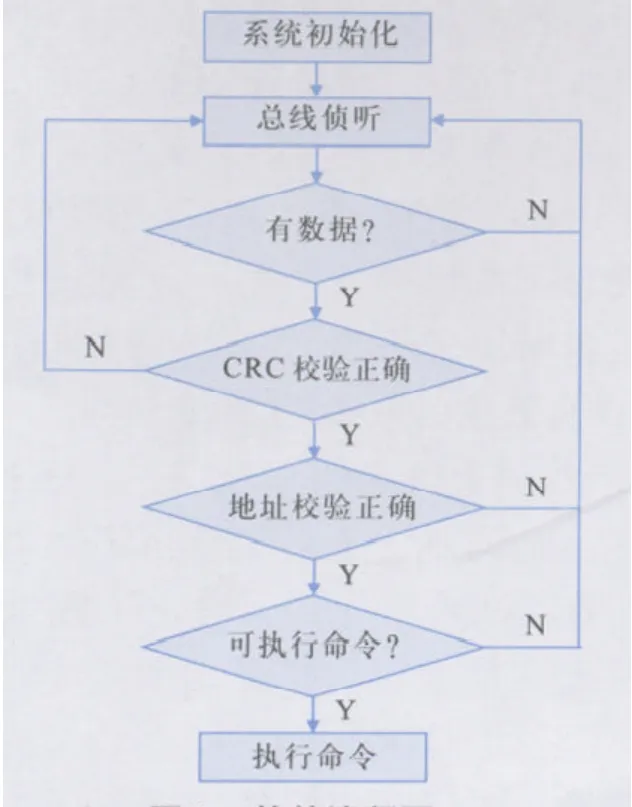
圖2 軟件流程圖
4 測試結果
由于列車長度不同,在鐵路橋梁上運行的周期也不同,在測試平臺上模擬撓度幅值為9.1 cm,根據不同運行周期測試統計,得出數據如表1。

表1 周期測試統計表
系統測試的精度為幅度/脈沖數目,通過表1可以計算出測量精度在0.1 mm以內,達到實際需求。圖3為模擬列車運行時LABVIEW采集到的撓度變化曲線。
圖3 撓度變化曲線
由圖3可以看出,在運行周期為10 s時,共有104個CCD象元發生變化,由此得到系統的精度為9.1/104mm。
5 結束語
本文所描述的光電液位式撓度監測系統成本相對較低,具有能夠對橋梁上多個點進行遠距離實時監測,采樣速率快,精度高等特點。通過在山西新原高速小溝特大橋長期測試,其性能穩定可靠,是鐵路橋梁撓度監測的新方法。
[1] 王慶有,孫學珠. CCD應用技術[M] . 天津:天津大學出版社,1987.
[2] 周立功. 深入淺出ARM7-LPC213x/214x(上)[M] . 北京:北京航空航天大學出版社,2004.
[3] Jean.Labrosse. 嵌入式實時操作系統μC/0S-II[M] . 2版. 北京:北京航空航天大學出版社,2003.
[4] 曾峰. 印刷電路板設計與制作[M] . 北京:電子工業出版社,2002.
[5] 馮耀輝. 印刷電路板設計.PowerPCB 5.0入門與提高[M] . 北京:人民郵電出版社,2003.
[6] 徐睿. 基于ARM的嵌入式系統開發與應用[M] . 北京:人民郵電出版社,2004.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
山東工業技術(2016年15期)2016-12-01 05:31:04
電子設計工程(2015年15期)2015-02-27 12:07:30