基于ANSYS的磁懸浮軸承轉(zhuǎn)子系統(tǒng)的動(dòng)力學(xué)特性研究
2010-07-26 09:15:30萬(wàn)金貴汪希平
軸承 2010年6期
關(guān)鍵詞:模態(tài)
萬(wàn)金貴,汪希平,高 琪,張 飛
(1.上海第二工業(yè)大學(xué) 實(shí)驗(yàn)實(shí)訓(xùn)中心,上海 201209;2.上海大學(xué) 機(jī)電工程與自動(dòng)化學(xué)院,上海 200072)
主動(dòng)磁懸浮軸承(active magnetic bearing, AMB)是利用電磁鐵產(chǎn)生可控電磁力將轉(zhuǎn)子懸浮支承的一種新型軸承,由于具有一系列獨(dú)特的優(yōu)點(diǎn)而引起人們的廣泛關(guān)注[1]。近年來(lái),AMB技術(shù)在國(guó)外得到了迅速的發(fā)展,已在軍工、航天等國(guó)防工業(yè)部門(mén)中得到了廣泛應(yīng)用,并向民用工業(yè)如航空、機(jī)床、化工、能源等領(lǐng)域推廣[2-4]。
主動(dòng)磁懸浮軸承經(jīng)常工作在每分鐘數(shù)萬(wàn)至數(shù)十萬(wàn)轉(zhuǎn)范圍內(nèi),此時(shí)的轉(zhuǎn)子動(dòng)力學(xué)行為往往表現(xiàn)為柔性轉(zhuǎn)子的特性[5]。為保證磁懸浮轉(zhuǎn)子系統(tǒng)的安全穩(wěn)定運(yùn)行,設(shè)計(jì)者需要對(duì)系統(tǒng)的動(dòng)力特性進(jìn)行分析和計(jì)算,并可對(duì)磁力軸承動(dòng)力學(xué)行為進(jìn)行調(diào)整和控制[6-7]。由于磁力軸承的結(jié)構(gòu)涉及到由電子電路組成的控制器,因此其動(dòng)力學(xué)特征與傳統(tǒng)軸承有著本質(zhì)區(qū)別。目前,人們對(duì)于磁懸浮軸承轉(zhuǎn)子系統(tǒng)的動(dòng)力特性普遍規(guī)律還沒(méi)有形成成熟的理論。因此,分析磁懸浮轉(zhuǎn)子系統(tǒng)動(dòng)力特性,探索研究其動(dòng)力學(xué)特點(diǎn)具有重要意義。
對(duì)轉(zhuǎn)子系統(tǒng)進(jìn)行動(dòng)力特性研究經(jīng)常采用傳遞矩陣法或有限元法。因有限元法能對(duì)較復(fù)雜的轉(zhuǎn)子系統(tǒng)進(jìn)行完整而精確的幾何建模,容易保證計(jì)算結(jié)果的準(zhǔn)確性,同時(shí)計(jì)算機(jī)技術(shù)的飛速發(fā)展又為有限元法的計(jì)算效率提供了保障,在現(xiàn)代較復(fù)雜的轉(zhuǎn)子系統(tǒng)動(dòng)力特性計(jì)算中越來(lái)越多采用有限元法[8-9]。當(dāng)前最為流行的有限元分析軟件ANSYS功能十分強(qiáng)大,還很好地解決了動(dòng)力特性分析中的“陀螺效應(yīng)”影響的問(wèn)題。下文即以ANSYS為工具,分析磁懸浮轉(zhuǎn)子系統(tǒng)的動(dòng)力特性及規(guī)律。
1 轉(zhuǎn)子系統(tǒng)結(jié)構(gòu)及參數(shù)
低溫制氧高速透平膨脹機(jī)的磁懸浮轉(zhuǎn)子系統(tǒng)的結(jié)構(gòu)如圖1所示。該轉(zhuǎn)子由兩個(gè)徑向電磁軸承和一個(gè)軸向電磁軸承支承,其中軸向電磁軸承的兩個(gè)電磁鐵對(duì)稱(chēng)安裝在轉(zhuǎn)子中央推力盤(pán)的左右兩側(cè)。徑向電磁軸承的初始結(jié)構(gòu)參數(shù):氣隙寬度x0=0.17 mm,磁極數(shù)為8,單個(gè)磁極面積S0=1.32×10-4mm2,每極線圈匝數(shù)N0=42,偏磁電流I0=1A。電磁軸承控制器由PID調(diào)節(jié)器、傳感器、功率放大器組成。
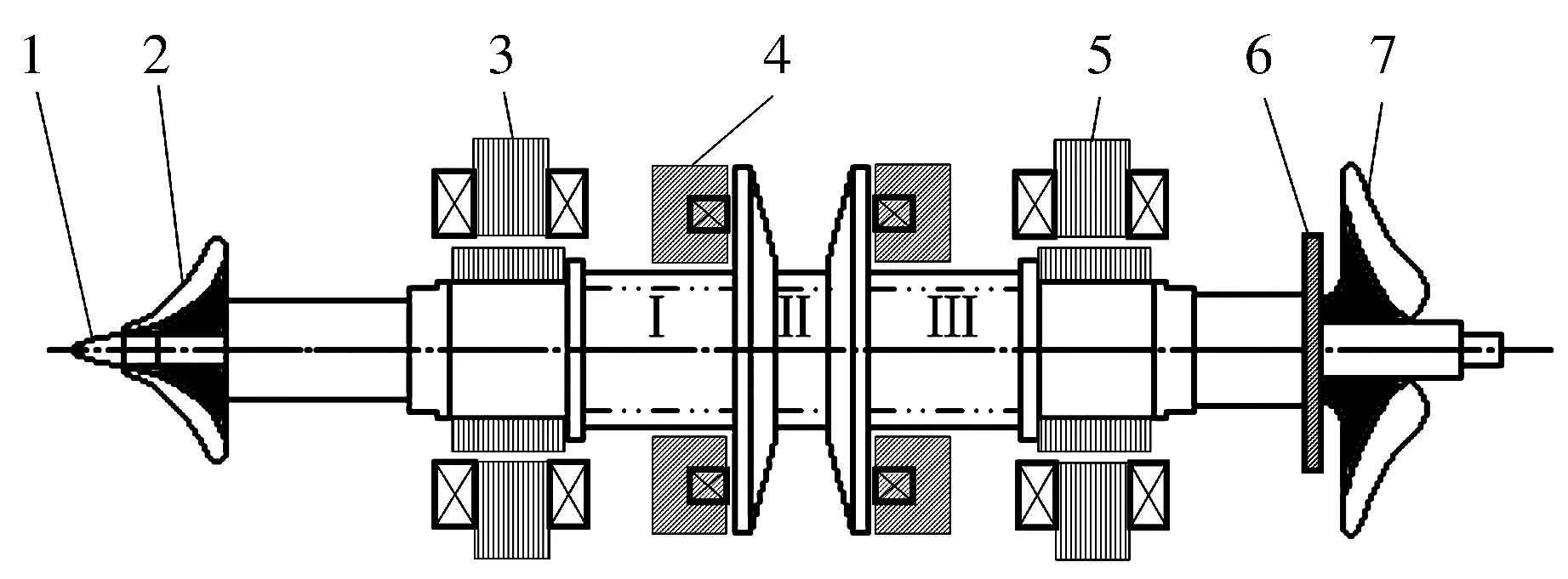
1—圓頭小螺帽;2—工作風(fēng)輪;3—左徑向磁軸承;4—軸向磁軸承;5—右徑向磁軸承;6—軸向定位墊片;7—平衡風(fēng)輪圖1 透平膨脹機(jī)磁懸浮轉(zhuǎn)子系統(tǒng)結(jié)構(gòu)示意圖
該轉(zhuǎn)子的設(shè)計(jì)轉(zhuǎn)速是1.08×105r/min。為考察該轉(zhuǎn)子是否能安全達(dá)到工作轉(zhuǎn)速并穩(wěn)定運(yùn)轉(zhuǎn)以及在工作轉(zhuǎn)速范圍內(nèi)系統(tǒng)的振動(dòng)特點(diǎn),故將分析的轉(zhuǎn)速范圍定在0~1.2×105r/min(0~2 kHz),即計(jì)算從零到稍高于工作轉(zhuǎn)速的整個(gè)轉(zhuǎn)速范圍內(nèi)的各階臨界轉(zhuǎn)速與模態(tài)振型。
2 剛度及阻尼系數(shù)的計(jì)算
工程應(yīng)用的電磁軸承轉(zhuǎn)子系統(tǒng)多為5自由度磁懸浮系統(tǒng),包含兩個(gè)徑向電磁軸承和一個(gè)軸向電磁軸承,為轉(zhuǎn)子提供除繞軸旋轉(zhuǎn)以外的其余5個(gè)自由度的控制。低溫制氧高速透平膨脹機(jī)的磁懸浮轉(zhuǎn)子系統(tǒng)也不例外,其控制系統(tǒng)各自由度的定義如圖2所示。徑向電磁軸承1和2分別對(duì)應(yīng)x1,y1和x2,y2方向的控制通道,軸向電磁軸承則對(duì)應(yīng)z方向的控制通道。
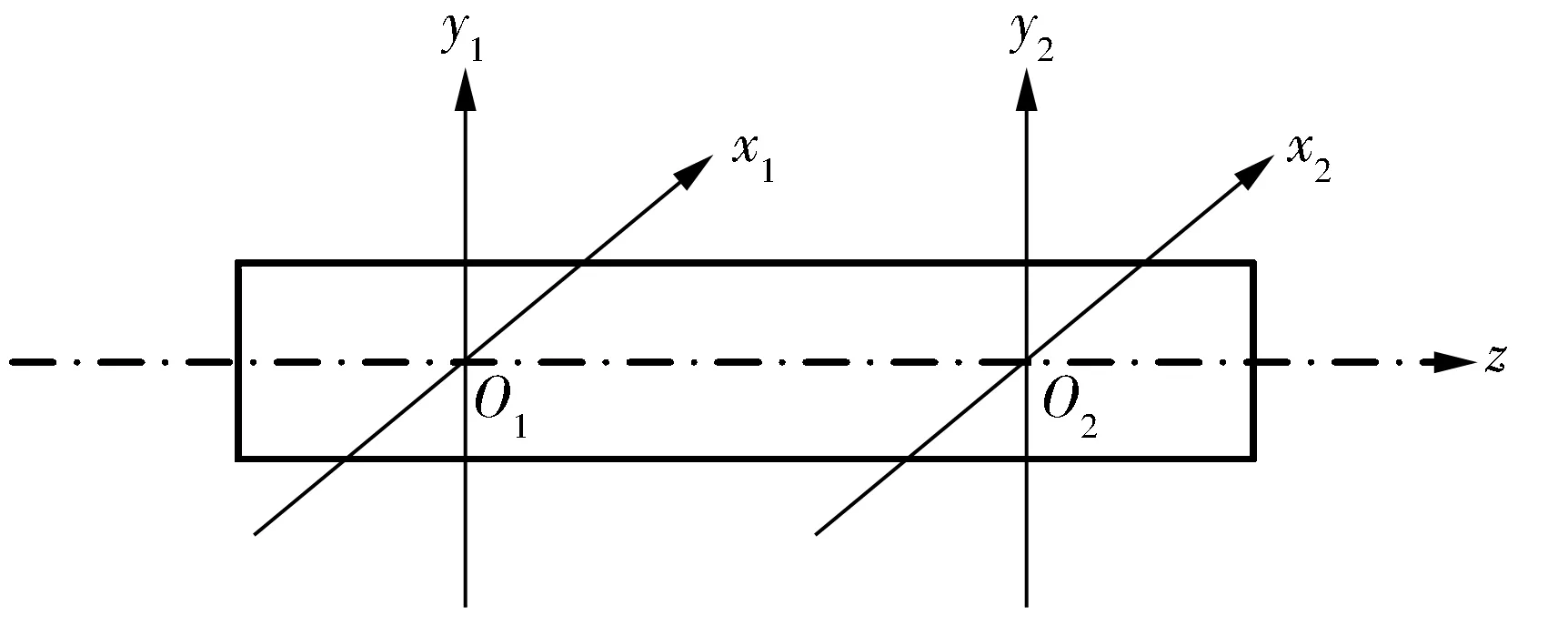
圖2 轉(zhuǎn)子的5自由度控制示意圖
由文獻(xiàn)[10]知,徑向電磁軸承一般視為正交各向異性的軸承,故每個(gè)徑向電磁軸承需要計(jì)算兩個(gè)正交方向的剛度與阻尼系數(shù)。另外,電磁軸承交叉剛度與阻尼系數(shù)的計(jì)算與選用的傳感器類(lèi)型和安裝等具體情況有關(guān)[11]。由于通常情況下電磁軸承氣隙寬度與轉(zhuǎn)子直徑之比很小,計(jì)算出的電磁軸承交叉剛度和阻尼系數(shù)也很小,故其對(duì)轉(zhuǎn)子動(dòng)力特性的影響可以不予考慮[12]。因此,完整的5自由度磁懸浮系統(tǒng)動(dòng)力特性計(jì)算中需要計(jì)算5組剛度與阻尼系數(shù),即(kxx1,cxx1),(kyy1,cyy1),(kxx2,cxx2),(kyy2,cyy2)和(kz,cz)。
每組剛度與阻尼系數(shù)的計(jì)算公式為:
(1)
式中:ke為對(duì)應(yīng)方向的等效剛度系數(shù);ce為對(duì)應(yīng)方向的等效阻尼系數(shù);ω為輸入控制器的信號(hào)頻率;Gc(jω)為控制器對(duì)應(yīng)方向傳遞函數(shù);kx為電磁軸承的位移剛度系數(shù);ki為系統(tǒng)的電流剛度系數(shù);μ0為真空磁導(dǎo)率;S0為氣隙截面積;N為電磁(軸承)線圈的匝數(shù);I0為偏磁電流分量;x0為轉(zhuǎn)子懸浮時(shí)軸承氣隙的設(shè)計(jì)長(zhǎng)度。
從上述計(jì)算式看,電磁軸承的剛度及阻尼系數(shù)除與kx,ki(由軸承結(jié)構(gòu)參數(shù)計(jì)算確定)有關(guān)外,還與控制器的傳遞函數(shù)及信號(hào)頻率ω有關(guān)。
3 系統(tǒng)臨界轉(zhuǎn)速和模態(tài)振型的計(jì)算
在ANSYS中創(chuàng)建該轉(zhuǎn)子系統(tǒng)完整的三維幾何模型,并指定單元類(lèi)型,設(shè)置材料屬性,然后劃分網(wǎng)格,生成有限元模型。
將每個(gè)電磁軸承模擬為具有剛度系數(shù)和阻尼系數(shù)的彈性阻尼支承,以COMBIN14單元來(lái)模擬,并設(shè)置相應(yīng)的實(shí)常數(shù)(剛度和阻尼系數(shù))。
在每個(gè)彈簧單元的外端施加“ALL DOF”約束(完全固接),內(nèi)端自由。施加約束后的整個(gè)系統(tǒng)有限元模型如圖3所示。
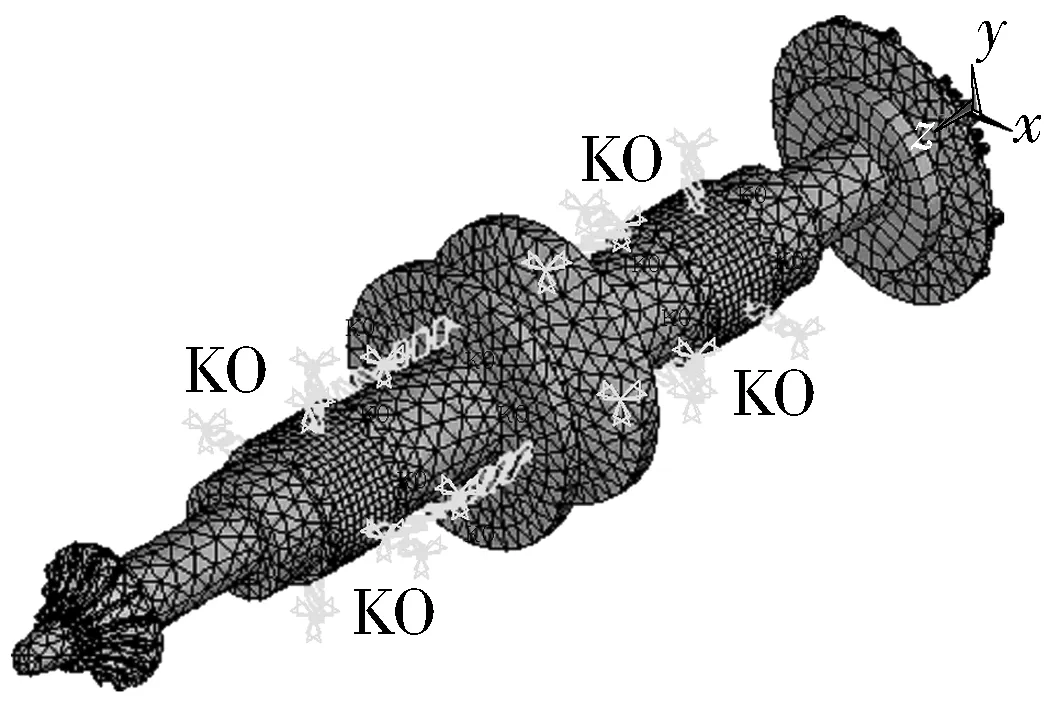
圖3 施加約束后的轉(zhuǎn)子系統(tǒng)有限元模型
求解得到系統(tǒng)的前8階固有頻率和模態(tài)振型。
上述計(jì)算過(guò)程只是在電磁軸承的一組特定剛度與阻尼系數(shù)下的ANSYS分析過(guò)程。但由于電磁軸承的剛度及阻尼系數(shù)是轉(zhuǎn)子渦動(dòng)頻率的函數(shù),當(dāng)渦動(dòng)頻率發(fā)生改變時(shí),電磁軸承的剛度及阻尼系數(shù)需要重新計(jì)算,由計(jì)算出來(lái)的新的剛度及阻尼系數(shù)代入ANSYS開(kāi)始新的模態(tài)分析,得到新的固有頻率和模態(tài)振型。
需要指出的是,轉(zhuǎn)子的渦動(dòng)情況很復(fù)雜,這里只考慮最常見(jiàn)和最主要的正向同步渦動(dòng),只有當(dāng)計(jì)算出的固有頻率與轉(zhuǎn)子的渦動(dòng)頻率相等時(shí)對(duì)應(yīng)的轉(zhuǎn)速才是臨界轉(zhuǎn)速。因此,需要計(jì)算工作轉(zhuǎn)速范圍內(nèi)一系列轉(zhuǎn)速下的固有頻率和模態(tài)振型,然后將各次模態(tài)分析得到的固有頻率匯總整理,繪制出各階固有頻率隨渦動(dòng)速度的變化曲線。
4 臨界轉(zhuǎn)速和模態(tài)振型計(jì)算結(jié)果及影響分析
4.1 計(jì)算結(jié)果
控制器參數(shù)如表1所示。各階固有頻率曲線如圖4所示。圖中各階固有頻率曲線與45°直線的交點(diǎn)所對(duì)應(yīng)的轉(zhuǎn)速即為正向同步渦動(dòng)的各階臨界轉(zhuǎn)速(為清晰起見(jiàn),列于表2),其對(duì)應(yīng)的振型即為臨界振型。模態(tài)振型計(jì)算結(jié)果如圖5所示。需要指出的是,此處的8階固有頻率與傳統(tǒng)轉(zhuǎn)子動(dòng)力學(xué)意義上的有關(guān)概念不同,僅是為了敘述方便,按固有頻率從小到大排列為1階、2階、3階等。若按傳統(tǒng)轉(zhuǎn)子動(dòng)力學(xué)的意義,7,8階才是真正的1階固有頻率。
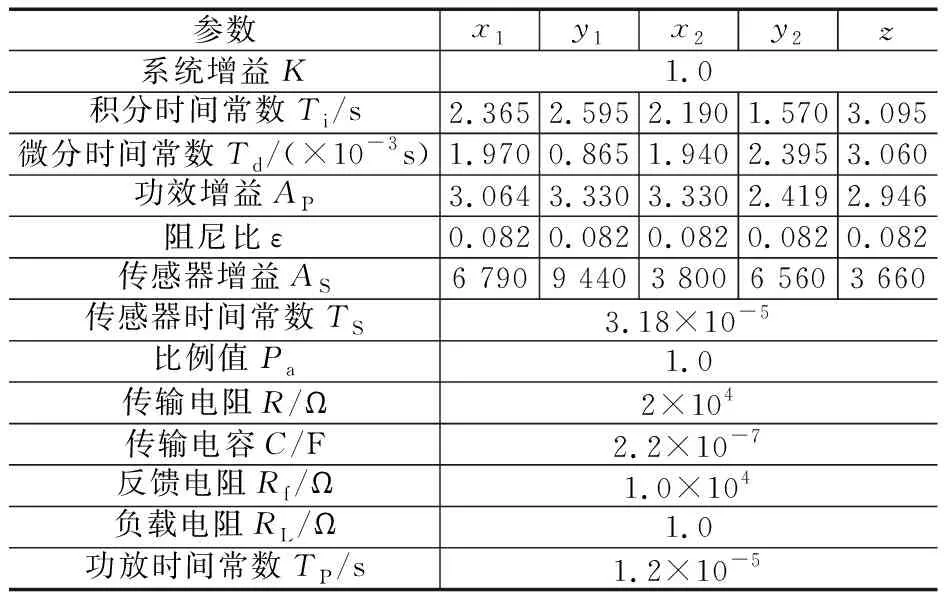
表1 各通道方向的控制器參數(shù)

表2 按初始參數(shù)計(jì)算的各階臨界轉(zhuǎn)速 ×103r/min
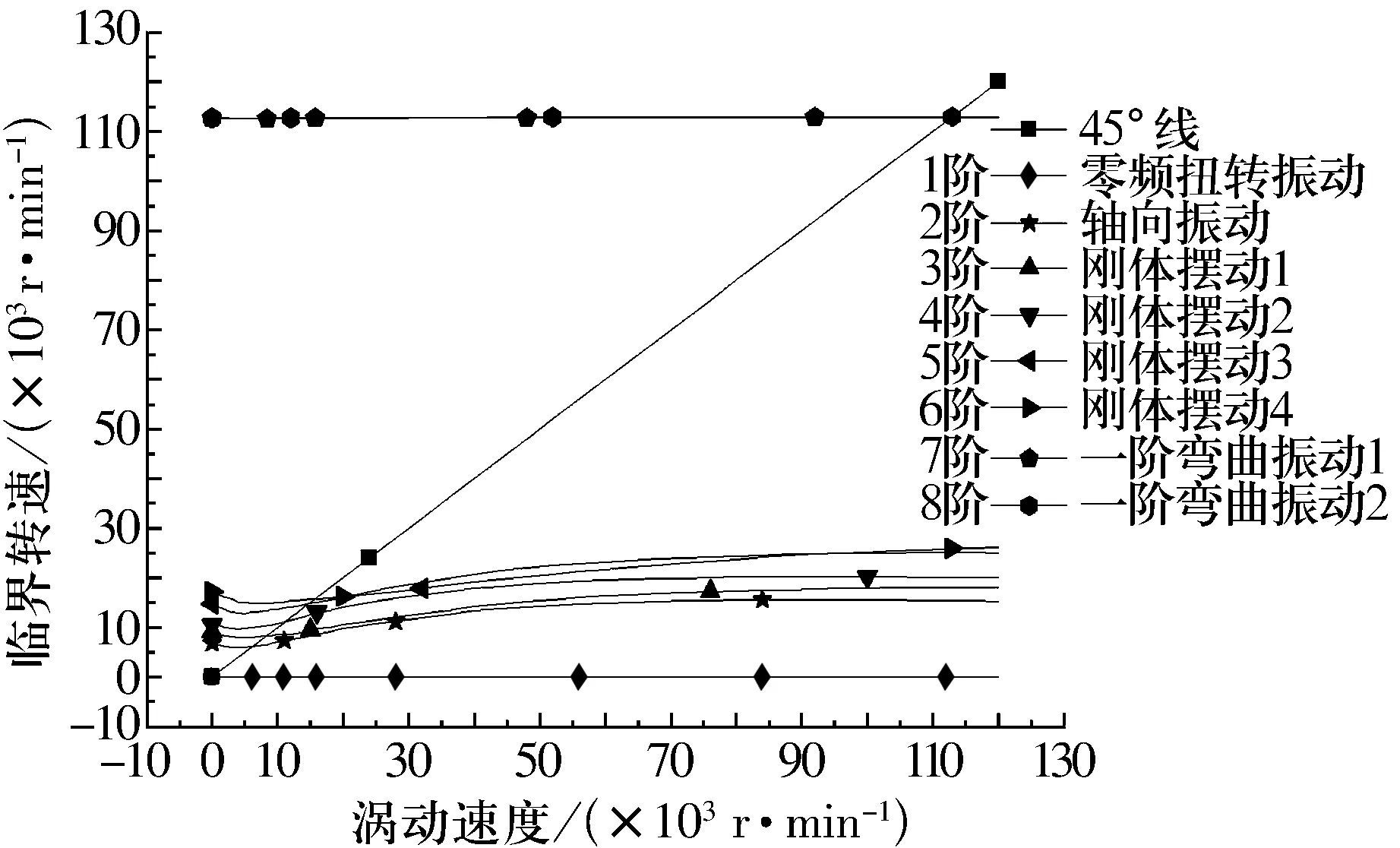
圖4 按初始參數(shù)計(jì)算的各階固有頻率變化曲線
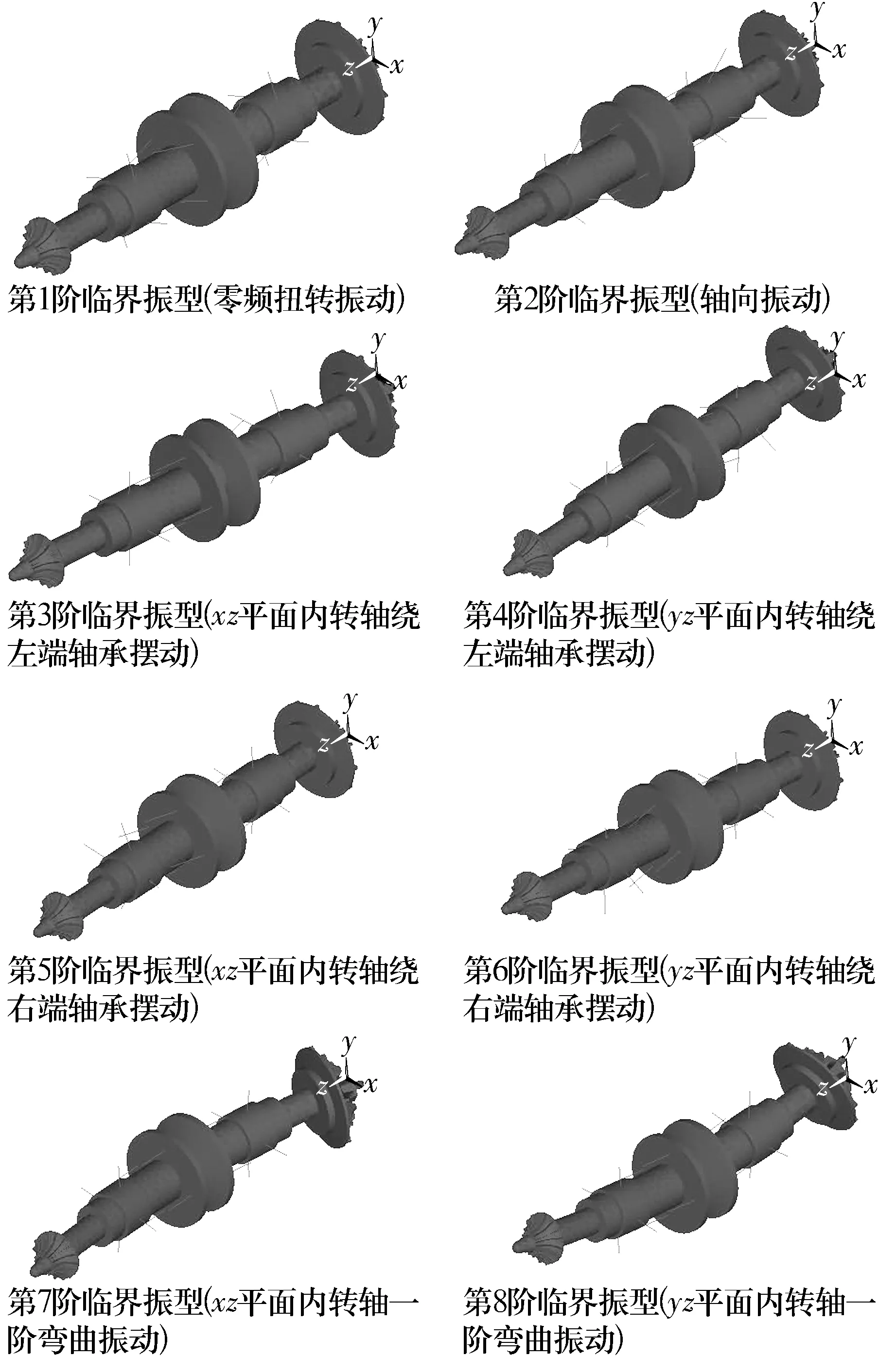
圖5 按初始參數(shù)計(jì)算的各階模態(tài)振型圖
由該組計(jì)算結(jié)果可知,系統(tǒng)在計(jì)算的頻率范圍內(nèi)(0~2 kHz)存在8階臨界轉(zhuǎn)速(固有頻率),對(duì)應(yīng)8階模態(tài)振型。由圖5的臨界振型知,除1階扭轉(zhuǎn)振動(dòng)和2階軸向平動(dòng)以外,第3,4,5,6階都是剛體擺動(dòng),其振動(dòng)頻率都在100~300 Hz。其中3階與4階、5階與6階分別是一對(duì)正交的模態(tài)振型。7階、8階是一階彎曲模態(tài)振型,也是一對(duì)正交模態(tài)。圖4反映了各階固有頻率與轉(zhuǎn)軸渦動(dòng)速度(轉(zhuǎn)速)之間的變化規(guī)律。2,3,4,5,6階曲線隨渦動(dòng)速度的提高變化明顯,說(shuō)明這5階固有頻率受軸承剛度影響較大。而由圖5的模態(tài)振型可以看出,這5階振動(dòng)與電磁軸承5個(gè)控制自由度z,x1,y1,x2,y2有一一對(duì)應(yīng)的關(guān)系。因此可以說(shuō)2,3,4,5,6階固有頻率是由電磁軸承各控制自由度方向的剛度來(lái)決定的。7,8階曲線基本重合,位于圖的上部,幾乎呈水平直線, 說(shuō)明7,8階固有頻率隨著轉(zhuǎn)速的提高沒(méi)有明顯改變,其幾乎不受軸承剛度的影響。從表2可知,前6個(gè)臨界轉(zhuǎn)速遠(yuǎn)小于設(shè)計(jì)轉(zhuǎn)速,是安全的;而7,8階臨界轉(zhuǎn)速則與設(shè)計(jì)轉(zhuǎn)速比較接近,分別與設(shè)計(jì)轉(zhuǎn)速相差4.4%和4.5%,不符合工程上對(duì)臨界轉(zhuǎn)速的安全性要求。
4.2 影響因素
4.2.1 軸承半徑氣隙
為考察電磁軸承半徑氣隙大小(最重要的軸承結(jié)構(gòu)參數(shù))對(duì)系統(tǒng)臨界轉(zhuǎn)速和模態(tài)振型的影響,改變軸承氣隙寬度x0,取x0=0.15 mm,其余參數(shù)均不變。得到的各階固有頻率變化曲線與圖4完全類(lèi)似,表3列出了具體的臨界轉(zhuǎn)速數(shù)值。而模態(tài)振型計(jì)算結(jié)果同圖5。

表3 改變軸承氣隙寬度計(jì)算的各階臨界轉(zhuǎn)速 ×103r/min
從表3可知,除零頻的扭轉(zhuǎn)振動(dòng)不變以外,其余2,3,4,5,6,7,8階臨界轉(zhuǎn)速分別提高了14.52%,10.46%,17.77%,14.42%,10.70%,0.05%,0.06%。可見(jiàn),當(dāng)軸承氣隙寬度x0從0.17 mm改為0.15 mm時(shí),因電磁軸承各自由度的剛度增加,各臨界轉(zhuǎn)速都得到提高。其中2,3,4,5,6階臨界轉(zhuǎn)速增幅較大,7,8階沒(méi)有明顯增加。
4.2.2 控制器參數(shù)
改變控制器參數(shù),如表4所示,軸承結(jié)構(gòu)參數(shù)不變。計(jì)算得到的各階固有頻率變化曲線如圖6所示;臨界轉(zhuǎn)速具體數(shù)值如表5所示。而模態(tài)振型計(jì)算結(jié)果仍與圖5一樣。
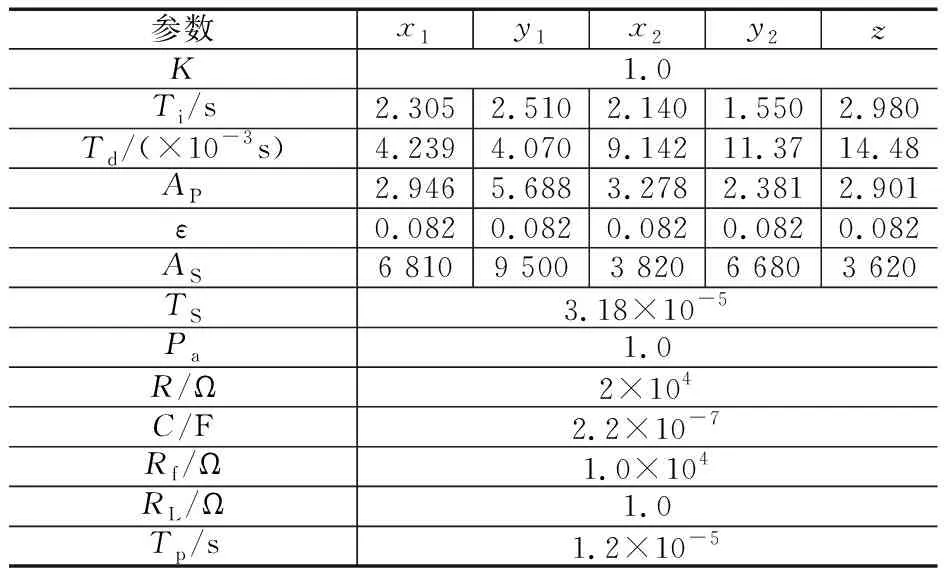
表4 改變后的各通道方向的控制器參數(shù)

表5 改變控制器參數(shù)計(jì)算的各階臨界轉(zhuǎn)速 ×103r/min
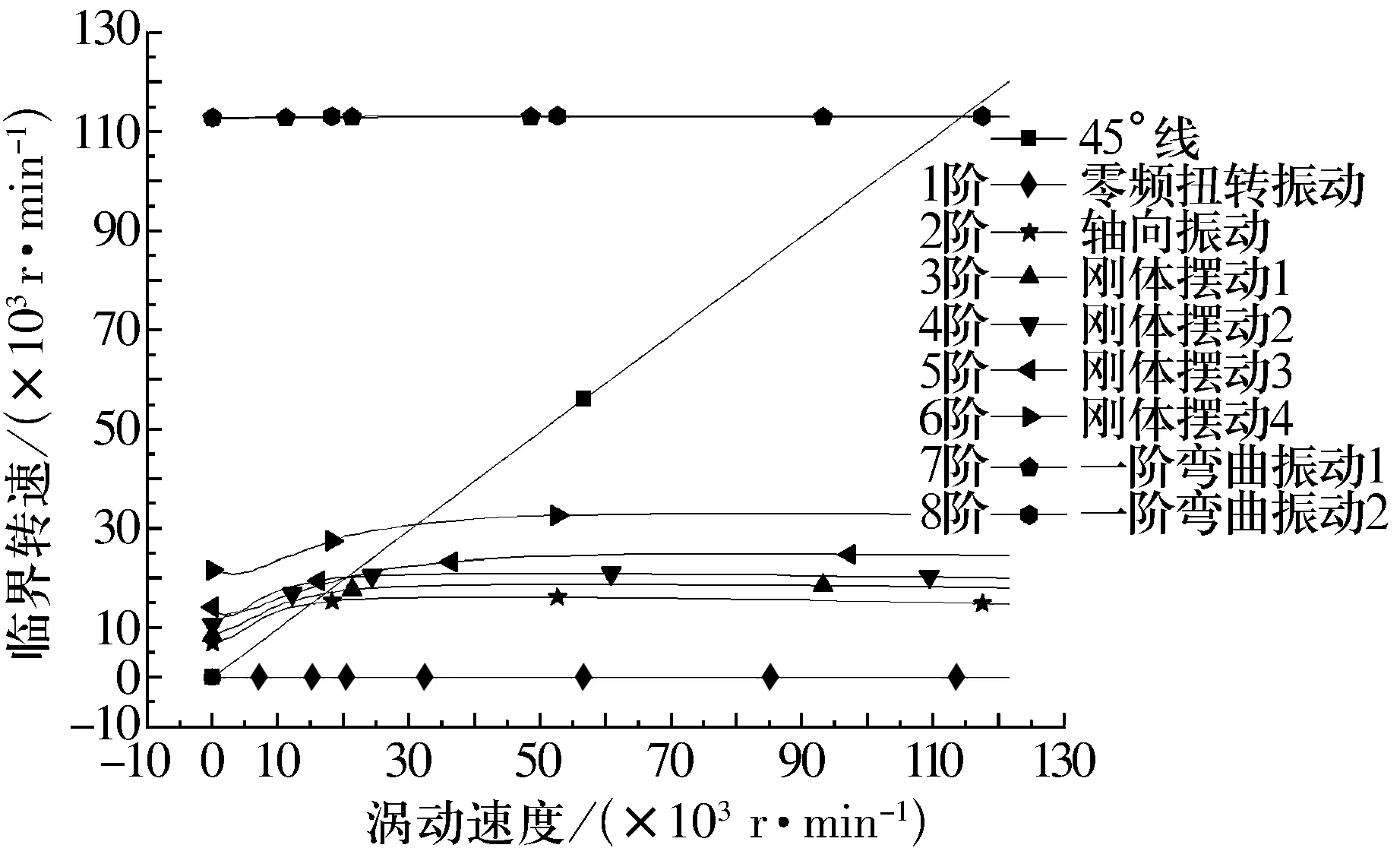
圖6 改變控制器參數(shù)的各階固有頻率變化曲線
僅改變控制器參數(shù)時(shí),得到的電磁軸承的剛度阻尼系數(shù)有明顯變化。對(duì)比圖6與圖4可知,各固有頻率曲線的總體變化規(guī)律沒(méi)有改變;而2,3,4,5,6階固有頻率曲線的形狀和排列順序有所改變。計(jì)算得到的各階模態(tài)振型形狀基本同前;只是振幅稍有改變,各階順序有所改變。這是由控制器參數(shù)改變后引起各控制自由度剛度大小改變和順序重新排列所致。這也再次證明了該轉(zhuǎn)子系統(tǒng)的2,3,4,5,6階振動(dòng)完全是由軸承決定的,且與控制器5個(gè)控制自由度有著準(zhǔn)確的一一對(duì)應(yīng)關(guān)系,其對(duì)應(yīng)的臨界轉(zhuǎn)速是“軸承主導(dǎo)型”臨界轉(zhuǎn)速,振動(dòng)模態(tài)也是“軸承主導(dǎo)型”振動(dòng)模態(tài)。由表5與表2的對(duì)比看出,臨界轉(zhuǎn)速除扭轉(zhuǎn)振動(dòng)不變以外,其余各階都提高了。其中2,3,4,5,6階臨界轉(zhuǎn)速變化幅度很大,其是由控制器參數(shù)大幅變化所致,7,8階臨界轉(zhuǎn)速仍沒(méi)有明顯增加。
4.2.3 轉(zhuǎn)子結(jié)構(gòu)
從上述計(jì)算結(jié)果可以看出,無(wú)論怎樣改變軸承結(jié)構(gòu)參數(shù)和控制器參數(shù),7,8階臨界轉(zhuǎn)速都沒(méi)有明顯改變,始終離設(shè)計(jì)工作轉(zhuǎn)速很近,以轉(zhuǎn)子系統(tǒng)現(xiàn)有的結(jié)構(gòu)條件是不能在設(shè)計(jì)工作轉(zhuǎn)速下安全運(yùn)轉(zhuǎn)的。看來(lái)要顯著改變7,8階臨界轉(zhuǎn)速,只有改變轉(zhuǎn)子本身的結(jié)構(gòu),通過(guò)增加或降低轉(zhuǎn)子的剛度,使臨界轉(zhuǎn)速遠(yuǎn)離工作轉(zhuǎn)速。經(jīng)研究計(jì)算,如圖1所示,減小圖1轉(zhuǎn)子上Ⅰ,Ⅱ,Ⅲ 3段的直徑,其中實(shí)線表示原來(lái)的軸段,直徑均為26 mm;雙點(diǎn)劃線表示改變后的軸段,直徑均變?yōu)?0 mm。軸承結(jié)構(gòu)參數(shù)與控制器參數(shù)不變。改變轉(zhuǎn)子結(jié)構(gòu)后,計(jì)算得到的模態(tài)振型仍同圖5,臨界轉(zhuǎn)速的計(jì)算數(shù)值如表6所示。

表6 改變轉(zhuǎn)子結(jié)構(gòu)計(jì)算的各階臨界轉(zhuǎn)速 ×103r/min
從表6可知,轉(zhuǎn)子改小后,系統(tǒng)的7,8階臨界轉(zhuǎn)速已經(jīng)大幅降低,都低于工作轉(zhuǎn)速23%,符合工程上對(duì)臨界轉(zhuǎn)速的安全性要求。其余各階臨界轉(zhuǎn)速變化不大,都離開(kāi)工作轉(zhuǎn)速足夠遠(yuǎn),都能安全越過(guò)。所以此改造方案是可行的。這也再次證明了7,8階臨界轉(zhuǎn)速主要受轉(zhuǎn)子結(jié)構(gòu)影響。
綜合以上分析,軸承的結(jié)構(gòu)參數(shù)與控制器參數(shù)的改變會(huì)使幾個(gè)低階臨界轉(zhuǎn)速(對(duì)應(yīng)轉(zhuǎn)子的剛體平動(dòng)與擺動(dòng)模態(tài))的大小發(fā)生明顯變化;而轉(zhuǎn)子結(jié)構(gòu)的改變能引起高階臨界轉(zhuǎn)速(對(duì)應(yīng)轉(zhuǎn)子的彎曲振動(dòng)模態(tài))的顯著改變。各種情況下系統(tǒng)模態(tài)振型形狀都不變。可以推斷:電磁軸承轉(zhuǎn)子系統(tǒng)在經(jīng)過(guò)幾個(gè)低階剛體運(yùn)動(dòng)模態(tài)以后,其模態(tài)振型才開(kāi)始呈現(xiàn)1階彎曲、2階彎曲等振動(dòng)模態(tài),對(duì)應(yīng)的臨界轉(zhuǎn)速主要受轉(zhuǎn)子結(jié)構(gòu)的影響,這才是傳統(tǒng)轉(zhuǎn)子動(dòng)力學(xué)意義上的臨界轉(zhuǎn)速。這是因?yàn)椋?dāng)轉(zhuǎn)子轉(zhuǎn)速增大時(shí),軸承剛度阻尼的影響逐漸減少,轉(zhuǎn)子特性的影響逐漸增大,此時(shí)系統(tǒng)的動(dòng)力學(xué)特性逐漸向傳統(tǒng)的動(dòng)力學(xué)特性逼近。事實(shí)上,在前面的計(jì)算中,當(dāng)提取的模態(tài)數(shù)增加時(shí),可以發(fā)現(xiàn)后面接著就是傳統(tǒng)意義上的2階和3階等彎曲振動(dòng)模態(tài),而且都是位于兩個(gè)正交平面內(nèi),成對(duì)出現(xiàn),這完全符合傳統(tǒng)轉(zhuǎn)子動(dòng)力學(xué)的特點(diǎn)。只是因?yàn)檫@時(shí)的臨界轉(zhuǎn)速已經(jīng)很高,超出本實(shí)例中的設(shè)計(jì)工作轉(zhuǎn)速很多,所以本文未列出。
5 實(shí)例對(duì)比
對(duì)電磁軸承支承的透平膨脹機(jī)樣機(jī)進(jìn)行過(guò)多次試驗(yàn)[13]。以初始參數(shù)計(jì)算結(jié)果為例,試驗(yàn)觀察到的臨界轉(zhuǎn)速與有限元計(jì)算結(jié)果對(duì)比如表7所示。試驗(yàn)中觀察到的幾個(gè)臨界轉(zhuǎn)速與有限元計(jì)算值非常接近,表明有限元分析方法是正確可靠的。

表7 臨界轉(zhuǎn)速有限元計(jì)算值與試驗(yàn)值的對(duì)比 ×103r/min
6 結(jié)論
(1) 由于電磁軸承特殊的控制方式——分通道控制,其轉(zhuǎn)子系統(tǒng)動(dòng)力學(xué)特性計(jì)算中包含幾個(gè)由軸承本身產(chǎn)生的低階臨界轉(zhuǎn)速及其相應(yīng)的振動(dòng)模態(tài)。這幾個(gè)低階振動(dòng)模態(tài)都是剛體運(yùn)動(dòng)模態(tài),其數(shù)目和形態(tài)與軸承控制器的幾個(gè)控制通道一一對(duì)應(yīng)。因此相應(yīng)的臨界轉(zhuǎn)速大小主要受電磁軸承的影響,即為“軸承主導(dǎo)型”臨界轉(zhuǎn)速,可以通過(guò)改變電磁軸承的結(jié)構(gòu)參數(shù)和控制器相應(yīng)控制通道的參數(shù)來(lái)精確調(diào)節(jié)。
(2) 電磁軸承轉(zhuǎn)子系統(tǒng)在經(jīng)過(guò)低階剛體振動(dòng)模態(tài)以后,接著就呈現(xiàn)1階彎曲、2階彎曲、3階彎曲等振動(dòng)模態(tài),所對(duì)應(yīng)的臨界轉(zhuǎn)速主要受轉(zhuǎn)子結(jié)構(gòu)的影響,是“轉(zhuǎn)子主導(dǎo)型”臨界轉(zhuǎn)速,這才是傳統(tǒng)轉(zhuǎn)子動(dòng)力學(xué)意義上的臨界轉(zhuǎn)速。此后的動(dòng)力學(xué)特性就和傳統(tǒng)的軸承轉(zhuǎn)子系統(tǒng)一樣。
猜你喜歡
成都信息工程大學(xué)學(xué)報(bào)(2022年4期)2022-11-18 07:31:14
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:12
工程與建設(shè)(2019年1期)2019-09-03 01:12:12
廣州大學(xué)學(xué)報(bào)(自然科學(xué)版)(2016年2期)2017-01-15 13:43:00
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
振動(dòng)工程學(xué)報(bào)(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36
