飛輪儲能抑制艦船綜合電力系統直流母線電壓波動的研究
2010-07-25 08:14:06王瑞田付立軍紀鋒方明胡亮燈
船電技術 2010年12期
王瑞田 付立軍 紀鋒 方明 胡亮燈
(海軍工程大學艦船綜合電力技術國防科技重點實驗室, 武漢 430033)
1 引言
近年來,隨著科學技術的不斷發展,現代艦船的電氣化程度越來越高,對電力供給的依賴也越來越強。為了實現電能的統一調度和集中控制,人們在電力推進的基礎上提出了艦船綜合電力系統(IPS)[1]。綜合電力系統主要包括發電、變配電、能量管理、電力推進等部分,而儲能模塊被認為是未來綜合電力系統的重要組成部分之一[2]。在現有的機械儲能、電磁儲能、電化學儲能等儲能技術中,飛輪儲能(Flywheel Energy Storage,FES)具有工作溫度范圍廣、可靠性高、使用壽命長、維護費用低、環境友好等優勢,已經在陸地電力系統、航空航天、新能源分布式發電等方面取得了日益廣泛的應用[3,4]。
飛輪儲能在綜合電力系統中的主要應用:快速而準確的潮流調控;重要負載的UPS;充當高能量密度武器的脈沖電源,提供短時強脈沖電流。
在飛輪儲能的控制策略方面,文獻[5]根據負載功率調節儲能電機的有功功率,大大減少了20 kHz高頻交流配電網的電壓波動;文獻[6]針對新能源分布式發電系統提出了基于感應電機矢量控制的能量互補控制策略,采用模糊控制算法實現直流母線電壓的自動調整,并通過模擬風力發電系統驗證了其方案;文獻[7]中,飛輪儲能裝置通過變壓器串聯在交流電網中,起到了動態電壓恢復器(Dynamic Voltage Restorer,DVR)的作用;文獻[8]采用儲能發電機為脈沖負載供電,將脈沖負載與艦船電力系統電氣隔離,消除了脈沖負載對電力系統的不利影響。
與陸用電力系統相比,艦船電力系統的送電距離較短,總容量小,推進模塊的容量比重大。艦船綜合電力系統直流網絡中,具有恒功率工作特性的推進電機在啟動與調速時會對直流母線電壓產生很大影響。本文分析了飛輪儲能電機的運行方式,根據儲能電機的三種工作模式設計了儲能電機的綜合控制策略,并針對突加恒功率負載時艦船電力系統直流網絡的電壓波動問題,進行了仿真研究。
2 系統結構及飛輪儲能裝置的工作原理
飛輪儲能裝置通過能量的存儲和釋放,可以起到平滑母線電壓的作用。在起用大容量的用電設備時,儲能裝置可以為艦船電站提供一定的功率儲備,將存儲的動能轉化為電能釋放到直流電網中去。在突卸大容量用電設備時,儲能裝置從電網吸收能量,轉化為飛輪的動能。因此,飛輪儲能裝置可以有效減少艦船綜合電力系統電壓波動,滿足艦船電力系統在各種工況下對電力品質的要求。圖1為具有飛輪儲能裝置的典型直流網絡結構圖。
3 儲能裝置的控制策略
3.1 儲能裝置運行特性分析
本系統中儲能電機選取三相異步感應電機。
根據機械能與電能之間的轉換關系,儲能電機有三種工作狀態:儲能、釋能、保持。儲能狀態下,電機作電動機運行,拖動飛輪加速,電能轉化為機械能,從電網吸收能量;釋能狀態下,電機作發電機運行,飛輪轉動慣量大,拖動電機轉子旋轉,隨著飛輪轉速下降,機械能轉化為電能,向電網饋送能量;保持狀態下,電機作電動機運行,飛輪轉速保持不變,從電網吸收能量補充定轉子銅耗、鐵耗、以及雜散損耗,使得飛輪長時間存儲額定設計的機械能。
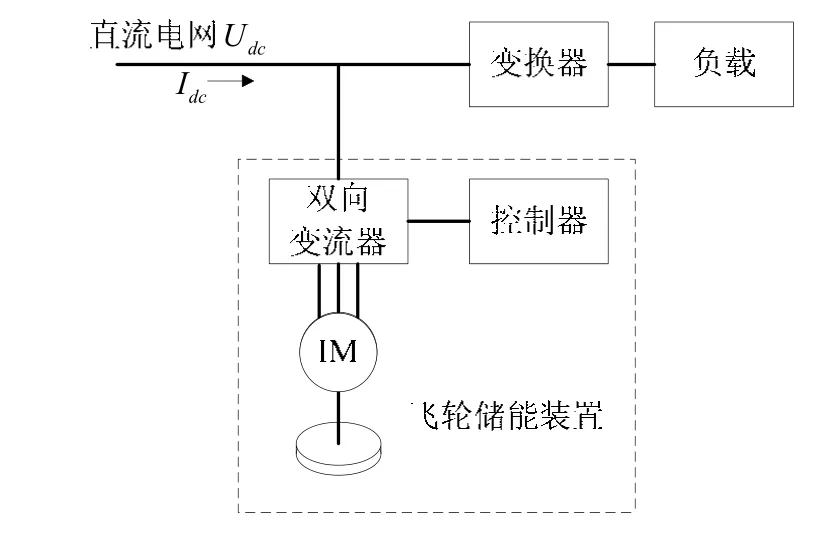
圖1 典型直流網絡結構圖
飛輪儲能裝置應用于艦船綜合電力系統中,為減少直流母線的電壓波動,需要有三種工作模式:啟動、保持、調節。啟動模式時,電機由靜止拖動飛輪加速,直到飛輪達到額定設計的轉速為止,電機工作在儲能狀態;保持模式時,飛輪轉速保持不變,存儲額定設計的能量持續運行,電機工作在保持狀態;當電網功率流動不平衡以致電壓波動較大時,儲能電機由保持模式進入調節模式,通過快速控制感應電機的功率,從而控制飛輪與電網間能量的流動,調節母線電壓,此時需要在儲能、釋能兩種工作狀態下動態切換。圖 2為儲能電機工作狀態與工作模式切換示意圖。其中,啟動模式和保持模式需要對電機轉速進行控制,而調節模式需要控制儲能電機功率。
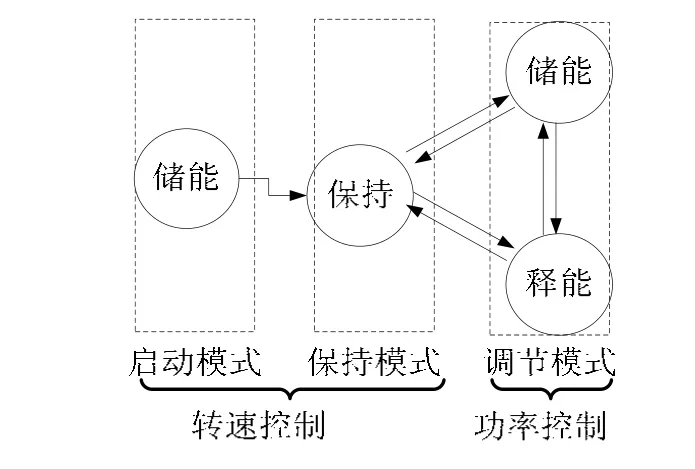
圖2 儲能電機工作狀態與工作模式切換示意圖
3.2 儲能電機的轉速控制
系統采用轉子磁場定向矢量控制技術來控制轉速。儲能電機轉速控制系統框圖如圖3所示[9]。
3.走技術進步之路。“科學發展觀”的第一要義是發展,而技術進步是采油礦實現又好又快發展的堅定基石。為此,我們需要堅持在繼承中發揚、在積累中提升的工作思路,大力實施科技興油戰略,始終以技術進步為重點,完善科技管理體系,加大科技投入,建立科技人才和特殊貢獻激勵機制,不斷提高技術創新創效能力。同時,在自主開發的基礎上,廣泛應用新工藝、新技術,在滾動勘探、三次采油、稠油熱采等方面力求實現新的突破,走出一條依靠科技進步提高開發水平的新路子。
圖中轉速控制器的觀測量為飛輪轉速,輸出量為轉矩指令T*e。采用PI控制。
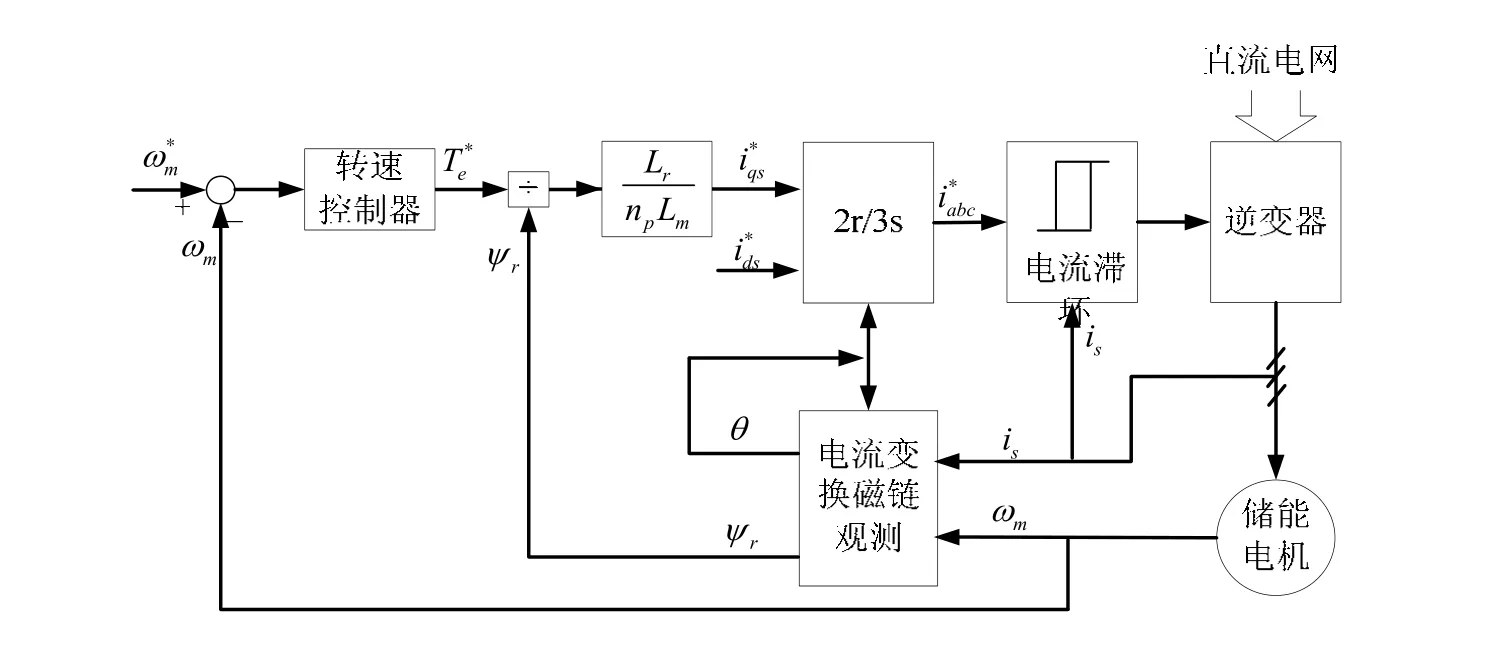
圖3 儲能電機轉速控制系統框圖
3.3 儲能電機的功率控制
圖1中,直流電網輸送的功率為

電網間的功率平衡關系為[5]

式中:PNet:直流電網輸送功率;PFESS:儲能電機的功率;PLOAD:負載功率;PLOSS:系統總損耗。
直流母線電壓Udc會隨著系統功率流動的變化而波動。當Udc降低至一定程度時,儲能電機應作發電機減速運行,向電網饋送能量,此時PFESS<0;當Udc升高至一定程度時,儲能電機應作電動機加速運行,從電網吸收能量,此時PFESS>0。通過控制儲能電機的功率PFESS,實現艦船電網與飛輪儲能裝置間功率的雙向流動,可以補償發電和用電功率之間的不平衡,增大系統阻尼,從而抑制系統電壓的波動。
根據

儲能電機的轉速ωm可以測量得到,通過控制儲能電機的電磁轉矩Te可以控制PFESS。
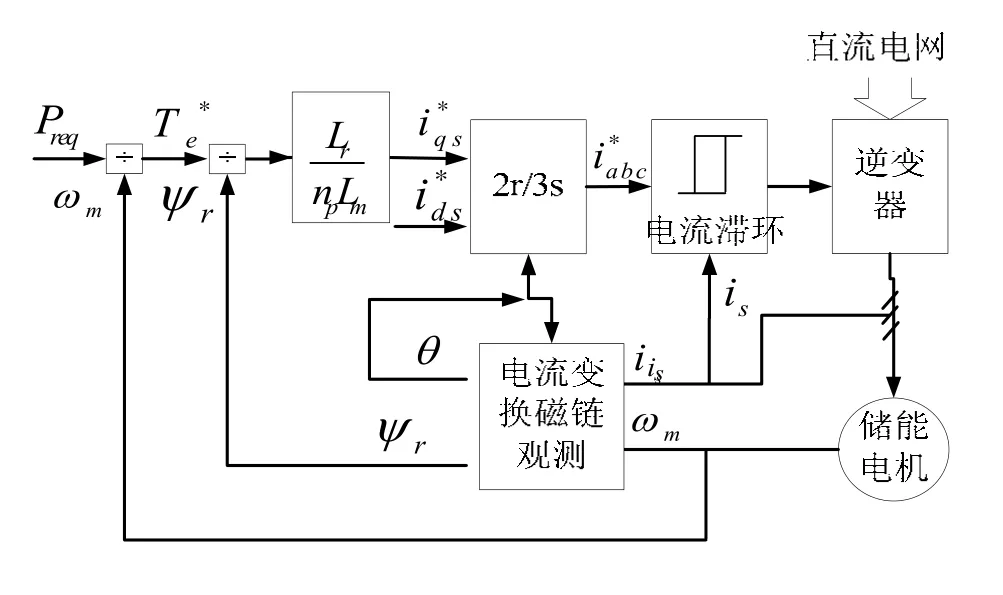
圖4 儲能電機的功率控制系統框圖
4 仿真模型及結果分析
為驗證儲能裝置控制策略的正確性,在PSCAD/EMTDC中分別對轉速控制、功率控制進行仿真研究。簡化直流網絡仿真模型如圖5所示,其中恒功率負載采用受控電流源實現。
4.1 儲能裝置的轉速控制
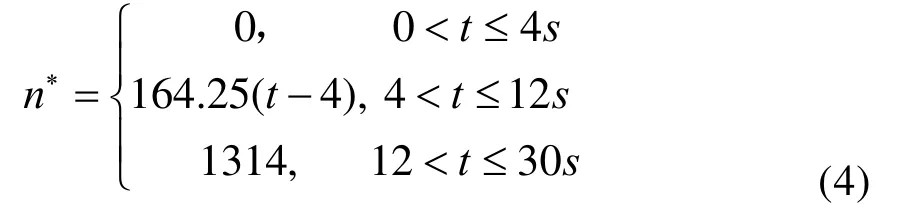
轉速給定值如式(4)所示
仿真波形如圖6所示。圖中Ngive為轉速給定值;Nm為儲能電機轉速;Teref為轉矩給定值;Te為儲能電機轉矩。
(1) 啟動工作模式(4~12 s)
儲能電機從4 s開始加速儲能,儲能電機從電網中吸收有功功率和無功功率。
(2) 保持工作模式(12~30 s)
當儲能電機到達額定轉速后,由啟動切換至保持工作模式,儲能電機處于空載運行狀態,此時電機只需從電網中吸收少量的有功功率維持恒定轉速。
4.2 儲能裝置的功率控制
為了對比說明儲能裝置對艦船電力系統電壓波動的影響,設置以下兩種情況:
A)儲能裝置不投入工作。系統在t=17 s時,突加6.0 kW恒功率負載,而后t=17.3 s時將此負載切除。直流母線的電壓波形如圖7示,圖中可以看到,母線電壓上下波動,幅值達到±14.8%。
B)儲能裝置投入工作。t=17 s時,在直流母線上突加6.0 kW恒功率負載,并在t=17.3 s時卸載。仿真結果如圖8所示,Pmotor、Qmotor分別為儲能電機入口側的有功功率和無功功率。在此過程中,儲能裝置由保持工作模式進入調節工作模式,在儲能裝置的調節作用下,直流母線電壓波動范圍被控制在±3.7%以內;儲能電機的轉速由穩態時的1314 rpm降到1254 rpm。儲能裝置向直流母線回饋有功功率的峰值達到3.7 kW,瞬態過程結束后,儲能裝置從電網吸收能量,由調節工作模式過渡至保持工作模式。
由仿真結果對比可知,儲能裝置投入工作后,突加突卸恒功率負載所引起的直流母線電壓波動大大減小。
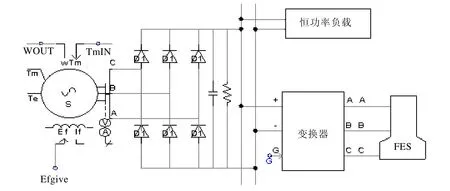
圖5 簡化綜合電力系統直流網絡的PSCAD仿真模型
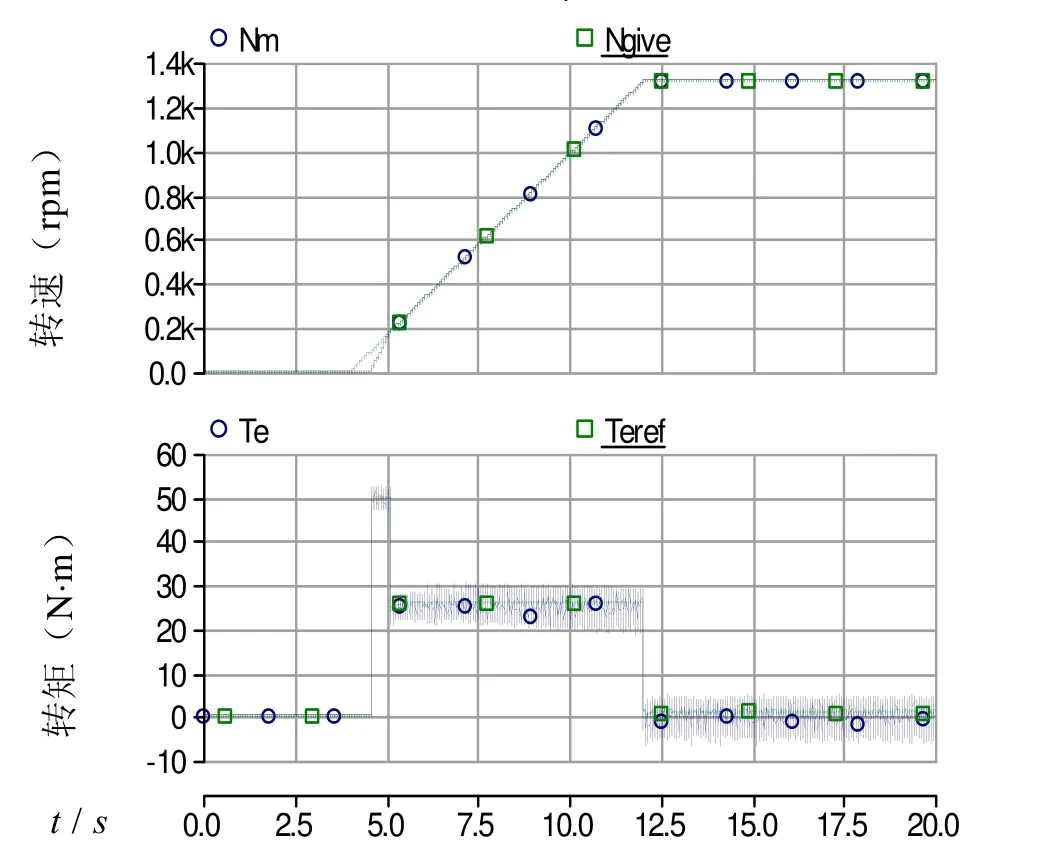
圖6 儲能電機的轉速控制仿真波形
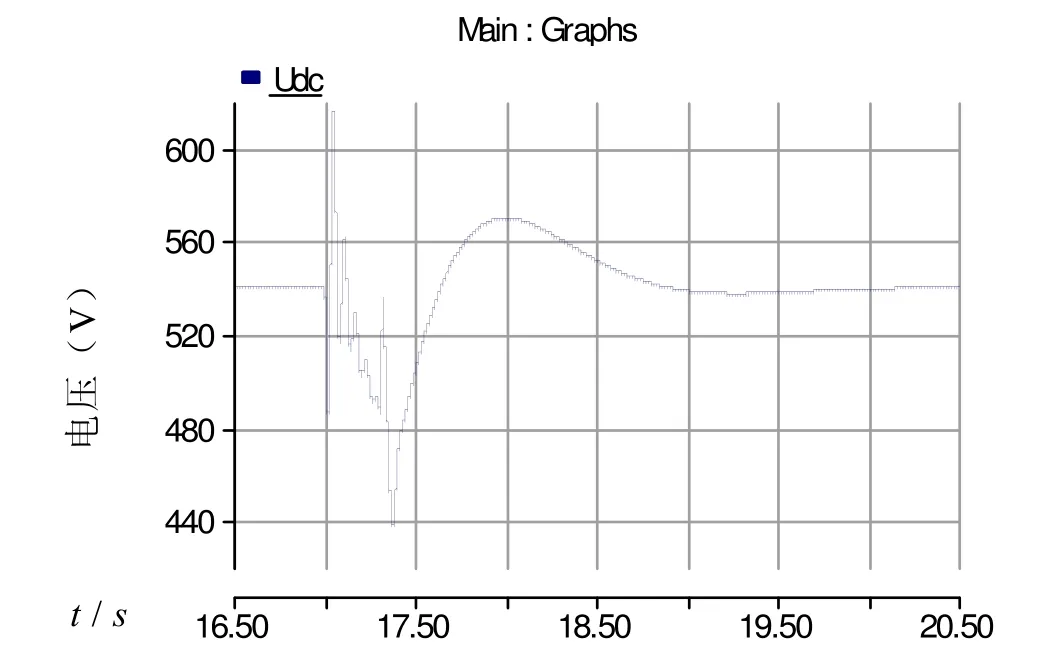
圖7 儲能裝置不投入工作時直流母線電壓波形
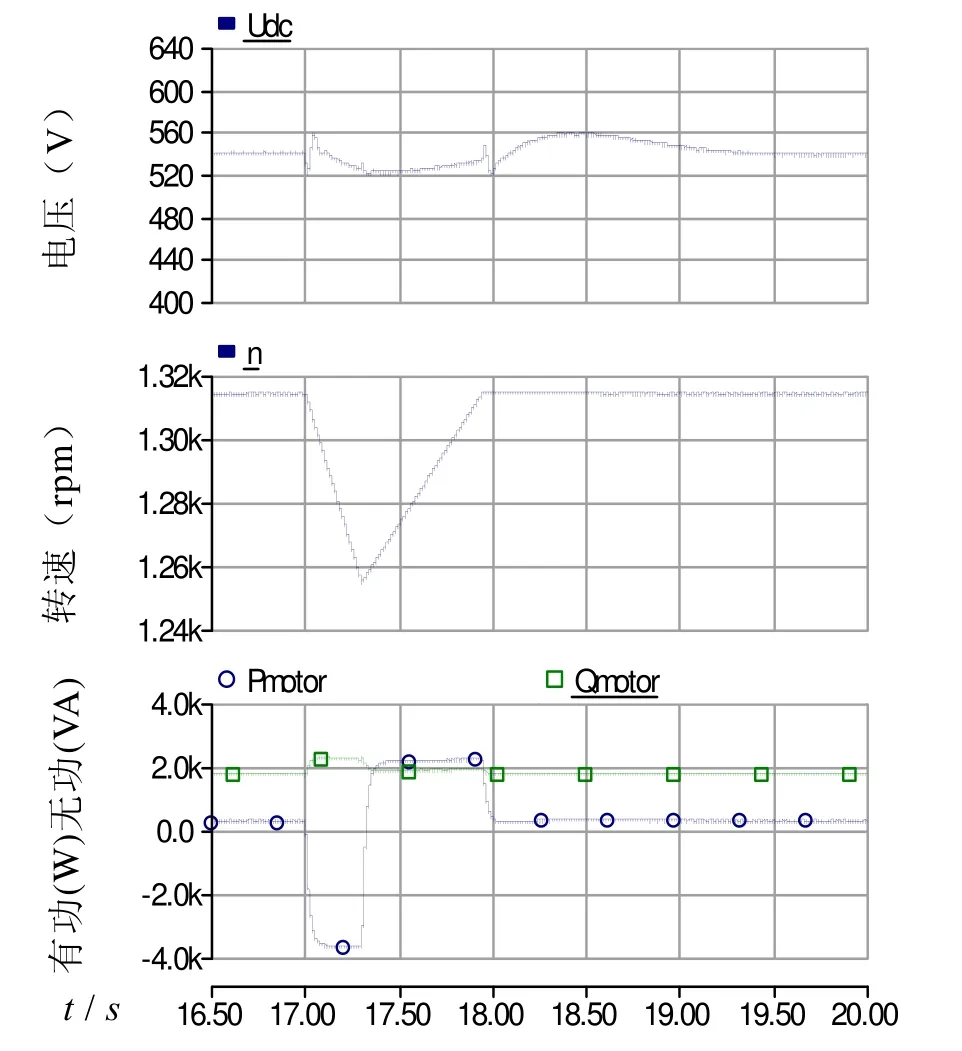
圖8 儲能裝置投入工作時仿真波形
5 結束語
本文在分析儲能電機運行方式的基礎上,根據儲能電機的三種工作模式設計了飛輪儲能裝置的綜合控制策略,并針對突加恒功率負載時艦船綜合電力系統直流網絡的電壓波動問題,在PSCAD/EMTDC中進行了仿真研究。研究表明,基于矢量控制的儲能裝置在三種工作模式下可以平滑快速切換,有效減小了直流母線電壓暫態過程時的波動,提高了電能質量。
[1] 馬偉明. 艦船動力發展的方向-綜合電力系統[J].海軍工程大學學報,2002,14(6):1-5,9.
[2] Doerry N H, Howard F. Designing All Electric Ships[C]. Proceeding of 2006 the Ninth International Marine Design Conference, 2006: 475-497.
[3] Jack G Bitterly. Flywheel Technology: Past, Present,and 21st Century Projections[J]. IEEE AES System Magazine, 1998, 13(8):13-16.
[4] 程時杰,李剛,孫海順等. 儲能技術在電氣工程領域中的應用與展望[J].電網與清潔能源,2009,25(2):1-8.
[5] Alan I, Lipo T A. Induction Machine Based Flywheel Energy Storage System[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(1):161-163.
[6] 王健, 康龍云, 曹秉剛等. 新能源分布式發電系統的控制策略[J]. 太陽能學報,2006,27(7):704-708.
[7] Satish Samineni, B K Johnson, H L Hess. Modeling and Analysis of a Flywheel Energy Storage System for Voltage Sag Correction[C]. IEEE International Electronic Machines and Drives Conference, 2003:1813-1818.
[8] Saurabh Kulkarni, Surya Santoso. Impact of Pulse Loads on Electric Ship Power System: With and Without Flywheel Energy Storage Systems[C]. IEEE Electric Ship Technologies Symposium, 2009:568-573.
[9] 陳伯時. 電力拖動自動控制系統(第3版)[M].北京:機械工業出版社,2005.