應用模糊隸屬度的H.264幀內預測模式快速選擇*
2010-06-25 09:38:56張有會王志巍楊會云霍利嶺
電視技術 2010年1期
關鍵詞:方向
趙 金,張有會,王志巍,楊會云,霍利嶺
(河北師范大學 數學與信息科學學院,河北 石家莊 050016)
1 引言
H.264[1]是ITU-T VCEG和ISO MPEG聯合頒布的新一代視頻壓縮標準,與之前的視頻壓縮標準及技術相比,H.264不僅壓縮性能更高,而且具有良好的網絡適應特性。
幀內預測是H.264的重要組成部分,它通過利用圖像的空間相關性來提高壓縮效率。然而幀內預測算法復雜度很高[2],以至于它不能應用于實時性要求高的場合,一些快速算法正是在這種情況下出現的。目前,減小幀內預測復雜度的方法大致可分為兩類:一類是簡化代價函數,另一類是縮小預測模式選擇的范圍。對于第二類方法,可以利用當前塊及其周圍像素的某些特征,預先排除某些可能性小的預測模式,或提前終止某些可能性小的模式的代價計算,由此降低幀內預測的復雜度。Pan Feng等[3]提出了基于邊緣方向直方圖的幀內預測模式快速選擇算法,使得對每個4×4像素塊只需要進行3~4個預測方向的計算;羅亮等[4]充分利用像素塊的紋理特性及相鄰塊預測模式的相關性,將4×4亮度塊的候選模式從9種降低到1~4種;文獻[5]利用SAD值對Intra_4×4方式進行預判,根據SATD特征排除可能性小的Intra_4×4預測模式,提高編碼速度。
筆者充分利用圖像塊本身的特征,提出了一種幀內預測模式快速選擇算法。根據隸屬度函數預先判斷宏塊的平坦程度,確定宏塊類型,進而判定塊的紋理方向,縮小預測模式選擇范圍,從而實現快速、有效的幀內預測模式選擇。
2 H.264的幀內預測算法
2.1 H.264的幀內預測模式
對亮度信息,H.264提供了2種幀內預測方式:基于16×16 宏塊的預測方式(Intra_16×16)和基于 4×4 塊的預測方式(Intra_4×4)。對色度信息,預測是基于8×8塊進行的。
H.264支持 4種 Intra_16×16預測模式,8×8色度塊只是預測模式的順序與Intra_16×16有所不同。Intra_4×4方式提供了9種預測模式。

圖1 Intra_4×4幀內預測模式
2.2 H.264的RDO幀內預測算法[6]
在H.264的幀內預測模式下,采用全搜索方式來尋找率失真代價(RD_Cost)最小的模式作為最優編碼模式

式中:SSD為誤差平方和,表示當前塊與重建塊差值的平方和;λmode=0.85×2(QP-12)/3, QP 為量化參數;Rate為熵編碼后的碼率。確定最優編碼模式的步驟如下:
1)分別計算宏塊中的每個4×4塊在9種模式下的代價RD_Cost,把每個4×4塊對應的最小的RD_Cost相加得到該宏塊Intra_4×4方式下的RD_Cost。
2)分別計算宏塊在4種模式下的絕對誤差和SAD(Sum of Absolute Difference),選擇 SAD 最小的模式,然后計算該模式下RD_Cost得到該宏塊Intra_16×16方式下的 RD_Cost。
3)比較 Intra_16×16方式和 Intra_4×4方式下的RD_Cost,選擇RD_Cost最小的模式作為該宏塊的幀內預測模式。
由計算過程可知,為了確定一個宏塊的幀內預測模式,需計算大量不同的模式組合,而且RD_Cost計算量相當大,因此,幀內預測模式選擇的計算復雜度非常大。
3 幀內預測模式快速選擇算法
對于亮度塊的預測,存在Intra_16×16和Intra_4×4兩種幀內預測方式,通常Intra_4×4適合于紋理比較豐富的區域,而Intra_16×16適合于較為平坦的區域。而全搜索算法不能預先判斷出宏塊所屬的幀內預測方式,要對兩種幀內預測方式分別進行檢測。如果能夠提前對宏塊是否平坦作出判斷,就可以預先判斷出預測模式所屬的幀內預測方式,而不需要對兩種方式都進行測試。這既在一定程度上縮小了候選模式的范圍,也降低了模式決定過程的復雜度。
因此,本算法分兩步進行幀內預測:首先進行宏塊類型的判定,即判定宏塊是否平坦,由此確定當前宏塊采用Intra_16×16模式預測還是采用Intra_4×4模式預測;然后對Intra_4×4模式進行最佳預測模式判定,即通過判定紋理類型,進一步將預測模式鎖定在較小的范圍內,在此范圍內計算最佳預測模式。
3.1 模糊隸屬度
本文算法主要是基于模糊隸屬度進行幀內預測。
在采用模糊技術時,整個算法的關鍵是隸屬度函數的設計,隸屬度函數的不同對算法的處理結果以及算法實現的難易程度產生的影響也不同,這要求隸屬度函數必須能準確客觀地反映系統中樣本存在的不確定性。目前有很多構造隸屬度函數的方法,但還沒有一個可遵循的一般性準則。在處理實際情況時,通常需要根據經驗針對具體問題來確定合理的隸屬度函數。
本文算法是基于參考文獻[7]的隸屬度函數進行設計的。在參考文獻[7]中,對于某一像素點x,定義x點的模糊隸屬度函數為其對周圍點的歸屬度

式中:x表示要處理的點,xi表示x鄰域的點,λ為一常數,取為圖像灰度均值的平方。從隸屬度函數定義可知,uxi(x)越大,x與xi越相似,x與xi歸為一類的概率越大。由此可見,模糊隸屬度函數可以反映像素間灰度值的相似程度。文獻[8]利用該隸屬度函數進行圖像平滑,取得了很好的效果。本文選擇該隸屬度函數進行宏塊類型判定和4×4塊模式選擇。
3.2 應用隸屬度函數的宏塊類型判定
根據上述分析可知,要判斷圖像的平坦程度,可選擇圖像中各像素灰度值作為待處理元素,計算其關于圖像灰度均值的隸屬度,隸屬度之和越大,表明各像素灰度值越接近,據此可以衡量圖像中像素灰度的相似程度,從而判斷圖像的平坦程度。
對宏塊進行模式預測前,先計算各像素灰度關于宏塊灰度均值的模糊隸屬度,根據隸屬度之和從Intra_16×16模式與Intra_4×4模式中選擇最優預測模式。為此,設定閾值T,若隸屬度之和大于T,則說明宏塊平坦,僅對Intra_16×16的模式進行擇優;否則,說明宏塊細節豐富,對Intra_4×4的模式擇優。
通過大量的實驗,并綜合考慮PSNR、碼率及編碼速度的情況,確定閾值T為0.8。
3.3 應用隸屬度函數的Intra_4×4預測模式快速選擇算法
在H.264的幀內預測模式中,大部分的預測模式都是基于方向的,特別是4×4亮度塊,9種預測模式中有8種是基于方向的預測 (如圖2),在塊的紋理方向上像素點的像素值是近似的。并且最優模式和次優模式往往具有類似的預測方向,即在預測方向圖中最優模式和次優模式通常是相鄰的。所以,可以選擇最可能模式及其相鄰的模式作為候選模式。這就為尋找Intra_4×4預測模式選擇的快速算法提供了線索。
定義方向隸屬度為某一方向上像素灰度值關于該方向灰度均值的模糊隸屬度之和,和越大,表明該方向上像素灰度越接近,該方向越有可能是塊的紋理方向。
對于 4 個主要方向(水平、垂直、45°和 135°方向),分別計算其方向隸屬度,值最大的方向所對應的模式確定為主要候選模式,主要候選模式及其相鄰模式連同DC模式一起作為最終的候選模式,在其中選擇最優模式。
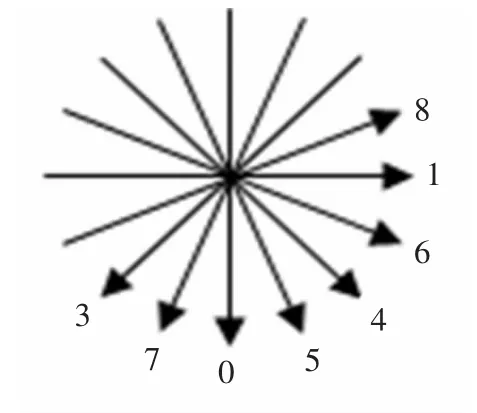
圖2 4×4塊的預測模式方向
3.4 幀內預測模式快速選擇算法
基于上述原理,模式快速選擇的步驟為:
1)計算各像素灰度值關于宏塊灰度均值的模糊隸屬度之和sum,與閾值T進行比較;
2)當sum≥T時,說明宏塊平坦,采用全搜索算法進行Intra_16×16的模式擇優;
3)當sum (1)分別計算 4個主要方向(水平、垂直、45°和 135°方向)的方向隸屬度; (2)值最大的方向所對應的模式及其相鄰模式連同DC模式一起作為候選模式; (3)對候選模式進行RDO計算,選取RD_cost最小的模式作為當前4×4塊的最佳預測模式。 表1 主要候選模式及其相鄰模式 為了驗證本文快速算法的有效性,在H.264的官方平臺JM13.2上對10個具有不同紋理復雜度的QCIF序列進行了測試,并在編碼時間、輸出碼率和峰值信噪比(PSNR)3個性能指標上與全搜索算法作了比較。 測試的實驗參數設置為:RDO有效;Hadamard變換有效;CAVLC熵編碼;每個序列分別取100幀,并全部為I幀編碼。分別在量化參數QP為24,28和32這3種情況下和全搜索算法進行比較,結果如表2所示。 表2 QCIF序列快速算法與原算法的比較 其中△t表示編碼時間的變化、△Rbit表示碼率的變化、△PSNR表示Y分量的峰值信噪比的變化。“-”表示比原來降低,“+”表示增加。 實驗結果表明,本文提出的算法與原算法相比,可以節約36%左右的編碼時間,碼率平均增加2.58%,信噪比平均下降0.03 dB。 圖3是標準視頻序列coastguard在全I幀情況下JM13.2全搜索算法和本文算法的RD曲線的比較。 由圖3可見,本文算法和全搜索算法的RD曲線基本重合,表明和全搜索算法相比,本文算法的率失真編碼性能基本不變,但計算復雜度明顯降低,編碼時間減少,從而證明了本文算法的有效性。其他測試序列的RD曲線也說明了同樣的結論。 圖3 coastguard序列的RD曲線 本文利用模糊隸屬度函數提出一種新的幀內預測算法,該算法預先從Intra_4×4與Intra_16×16兩種預測模式中選擇一種最佳預測模式,并通過判斷紋理方向減少Intra_4×4的候選模式。實驗測試表明,該算法的碼率增加少,信噪比下降低,有效地縮短了編碼時間,是一種快速的H.264幀內預測算法。該算法在基本保持H.264圖像質量與編碼效率的基礎上,有效降低了幀內預測算法的復雜度。 [1]ITU-T Rec.H.264/ISO/IEC14496-10 AVC (Doc JVT 3/G050),Draft ITU-T recommendation and final draft international standard of joint video specifications[S].2003. [2]紀永昭,張穎,張兆揚.H.264幀內模式快速選擇算法研究[J].電視技術,2004(9):8-10. [3]PAN F, LIN X, RAHARDJA S, et al.Fast mode decision for intra prediction[C]//JVT-G013,JVT of ISO/IEC MPEG&ITU-T VCEG.Thailand∶[s.n.], 2003. [4]羅亮,劉春生,周蘆明.H.264/AVC快速幀內預測模式選擇算法[J].計算機應用,2008,28(4):1006-1008. [5]謝翠蘭,鄭藝玲.基于SAD和SATD的H.264快速幀內預測算法[J].計算機工程,2008,34(10)∶215-217. [6]王維哲,周兵,張行進.H.264編碼中的幀內預測模式選擇算法[J].計算機工程,2008,34(2):226-231. [7]岡薩雷斯.數字圖像處理[M].2版.阮秋琦,阮宇智,譯.北京:電子工業出版社,2003. [8]韓彩夏,王曉宇.基于Mean-shift算法與模糊熵的圖像平滑[J].計算機應用,2009,29(1):63-67.
4 實驗結果與分析


5 小結
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
