基于AT89C51的倒車雷達設計與開發
2010-06-13 08:04:08高中義
科技傳播 2010年21期
高中義
長春職業技術學院汽車學院,吉林長春 130033
基于AT89C51的倒車雷達設計與開發
高中義
長春職業技術學院汽車學院,吉林長春 130033
隨著汽車普及率的逐年增加,消費者在將汽車作為交通運輸工具的同時,對于汽車的安全性有了更高的要求。在駕駛員最為常見的駕駛行為中,倒車引發的交通事故不在少數,由此引發的重大事故也時有發生,給交通安全埋下了重大隱患。為解決這一安全問題,倒車雷達應運而生,越來越多的商家也進入了這個市場。倒車雷達的全稱是“倒車防撞雷達”,也稱“泊車輔助裝置”,是汽車泊車安全輔助裝置,能以聲音或者更為直觀的視頻顯示告知駕駛員周圍障礙物的情況,解除了駕駛員泊車和起動車輛時前后左右探視所引起的困擾,幫助駕駛員掃除了視野死角和視線模糊的缺陷,提高了安全性。倒車雷達的主要作用是在倒車時,駕駛員無須回頭便可知道車后有無障礙物,使停車和倒車更容易、更安全。目前,在國內只有部分高檔車配有倒車雷達,更多的車型在這方面還是空缺。本課題就是針對市場上中低檔車型設計的一種低成本、高靈活性、高可靠性、易于控制、性能優良的倒車雷達。
嵌入式系統;汽車倒車雷達;超聲波
1 課題的研究背景及意義
隨著汽車普及率的逐年增加,消費者在將汽車作為交通運輸工具的同時,對于汽車的安全性有了更高的要求。在駕駛員最為常見的駕駛行為中,倒車引發的交通事故不在少數,由此引發的重大事故也時有發生,給交通安全埋下了重大隱患。為解決這一安全問題,倒車雷達應運而生,越來越多的商家也進入了這個市場。倒車雷達的全稱是“倒車防撞雷達”,也稱“泊車輔助裝置”,是汽車泊車安全輔助裝置,能以聲音或者更為直觀的視頻顯示告知駕駛員周圍障礙物的情況,解除了駕駛員泊車和起動車輛時前后左右探視所引起的困擾,幫助駕駛員掃除了視野死角和視線模糊的缺陷,提高了安全性。倒車雷達的主要作用是在倒車時,駕駛員無須回頭便可知道車后有無障礙物,使停車和倒車更容易、更安全。目前,在國內只有部分高檔車配有倒車雷達,更多的車型在這方面還是空缺。本課題就是針對市場上中低檔車型設計的一種低成本、高靈活性、高可靠性、易于控制、性能優良的倒車雷達。
2 設計原理
在本課題中嵌入式系統是倒車雷達的技術核心。嵌入式系統的基礎是計算機技術,其目的是用于實際生產、生活的應用,通過對其系統的軟件、硬件來進行配置,來制造出有嚴格要求功耗、成本、體積、功能可靠的專有系統。它可以實現對其他設備的控制、監視、管理等功能。嵌入式系統包括硬件和軟件兩大部分。硬件部分包括處理器、微處理器、存儲器及外設器件和圖形控制器等,它是整個系統的物理基礎;軟件部分則包括操作系統軟件和應用程序編程,可以為實際系統的運行提供控制方法。通過嵌入式系統的不斷發展和其產業化進程的不斷加深,現已廣泛地應用于日常信息通信、企業工業、國家軍事、日常生活辦公等多個領域。
超聲波定位技術是倒車雷達設計的基礎。超聲波的波長比一般聲波要短,并且易于定向發射,具有較好的方向性,強度好控制。由于超聲波的速度相對于光速來說要小的多,其傳播時間比較容易檢測,已被廣泛用于超聲測距,測速,清洗,焊接等方面。超聲波作定位技術就是由超聲波發射裝置發射不被人們聽到的超聲波,借助空氣媒介傳播,由障礙物反射回來的時間間隔長短與被發射的超聲波的強弱判斷障礙物性質或障礙位置的方法。
3 設計與開發
結合嵌入式系統的特點和超聲波測距原理,從設計任務的復雜程度、開發人員的熟悉度、開發成本等多方面權衡,本設計選擇AT89C51單片機作為主控器。超聲波探測器件可以發射超聲波并接收回波,再用單片機記錄從超聲波發射時刻起到接收到超聲波返回信號之間的間隔時間,再根據聲波在空氣中的傳播速度,即可計算出產生回波的物體與超聲探測元件之間的距離。

系統總體架構框圖
因此,用單片機某一端口輸出一定周期的方波,經超聲波發射探頭產生的機械諧振發射超聲波,與此同時啟動定時器工作。當超聲回波接收探頭接收到回波信號后,經放大整形送至比較器,比較器的輸出將變為高電平,此信號就作為單片機中斷請求信號,單片機一旦接收到中斷請求信號立即讀取定時器記錄的時間,再將計算得到的距離數據送數碼管顯示(LED數字顯示通過動態掃描法來實現),同時觸發語音模塊電路,不斷重復發射、接收、顯示與語音提示這一循環過程,直至汽車退出倒車運行控制狀態。
倒車雷達硬件電路的設計主要包括單片機系統及顯示電路、超聲波發射電路和超聲波檢測接收電路、倒車控制信號電路、語音電路組成。

倒車雷達硬件設計圖
倒車雷達的軟件設計主要有主程序、發送子程序、接收子程序、報警程序、LED顯示程序組成。程序的設計思路為:完成定時器、中斷系統及各種初始化參數的設定,發出40KHz的方波信號,等待接收中斷、調用距離計算子程序、顯示測試距離、發出語音同步提示控制信號。
一般來說,設計制作的任務不可能一次性做好,總是需要調試的。通過采用KEIL軟件和Proteus進行聯調仿真,仿真成功后,再進行實際實驗,這樣可以加快開發的進度,又可以節省硬件資源。硬件、軟件聯合仿真調試完成后,將編譯好的程序下載到單片機進行試運行。并根據運行及在調試中出現的問題進行反復修改,對測量過程中產生的誤差和重復一致性進行多次實驗分析,通過不斷的優化使系統達到能夠進行實際使用的測量要求。
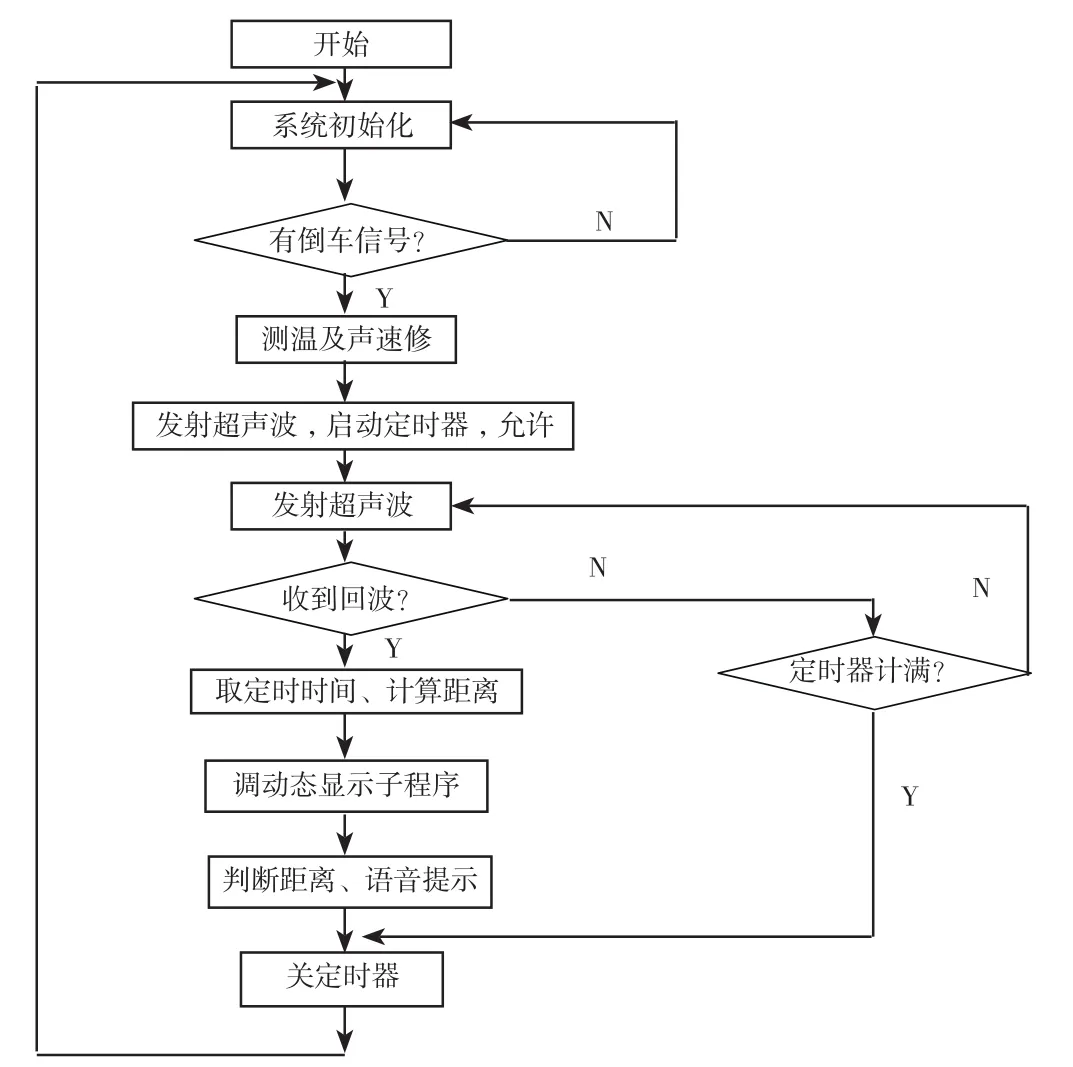
程序主流程圖
4 結論
本課題所設計的倒車雷達,能夠滿足一般性近距離測距的要求,系統構造成本較低,性價比高,是進行交通管理的有效手段和工具,可提高車輛距離檢測的準確性,有利于交通運輸的科學管理,降低對駕駛人員本身的素質要求。本設計有望成為駕駛員特別是貨車以及公共汽車駕駛員的好幫手,可有效的減少和避免那些視野不良的大型汽車的如冷藏車、集裝箱車、垃圾車、食品車、載貨車、公共汽車等倒車交通事故,另外還特別適用于夜間輔助倒車、倒車入庫以及進入停車場停車到位,在日常駕駛過程中起到了良好的輔助作用。
U46
A
1674-6708(2010)30-0253-02
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
鐵道通信信號(2018年2期)2018-04-18 12:18:23
電鍍與環保(2016年3期)2017-01-20 08:15:32
公民與法治(2016年4期)2016-05-17 04:09:26
電子設計工程(2015年15期)2015-02-27 12:07:30
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13