一種自平衡兩輪移動機器人的設計實現
2010-06-13 02:10:40胡天鏈
科技傳播 2010年14期
張 琦,胡天鏈
西南科技大學信息工程學院,四川綿陽 621010
一種自平衡兩輪移動機器人的設計實現
張 琦,胡天鏈
西南科技大學信息工程學院,四川綿陽 621010
本文基于仿人智能控制研究了有關自平衡兩輪移動機器人運動控制問題,通過分析自平衡兩輪移動機器人的運動特性,設計了基于動覺智能圖式仿人智能控制的控制器,并在嵌入式RT-Linux操作系統下實現了機器人軟件設計。本文還應用Matlab/Simu2link仿真軟件進行了機器人的仿真實驗,并得到了較好的實驗結果。
兩輪移動機器人;仿人智能控制;動覺智能圖式;ARM9;RT-Linux
0 引言
自平衡兩輪機器是一個典型的非線性、強耦合、多變量、時變和自然不穩定系統,是近年來研究倒立擺與機器人控制問題的又一研究平臺,是檢驗各種控制理論的理想模型。仿人智能控制理論從分層遞階智能控制系統的最低層(運行控制級)著手,充分應用已有的控制理論成果和計算機仿真結果,直接對人的控制經驗、技巧和各種直覺推理邏輯,即人體的動覺智能進行測辨、概括和總結,并將其編制成各種簡單實用、精度高、能實時運行的控制算法(動覺智能圖式),直接應用于實際控制系統。本文依據動覺智能圖式的仿人智能控制理論實現兩輪移動機器人的運動控制,對自平衡小車機器人提出了控制思想。
1 系統結構
以自平衡兩輪機器人行走方向為X軸,車輪軸線為Y軸,鉛垂線為Z軸,設整機質心為P點,系統模型可簡化為如圖1所示。
可以看出,該系統具有3個自由度:繞y軸的轉動,轉角θP和角速度ωP;沿x軸的直線運動,位移xrm和移動速度vrm;繞z軸的轉動,轉角βz和角速度ωP,在下文中即以該6個變量為狀態變量。系統的平衡靠電動機施加在左右輪軸上的驅動力矩TL和TR控制,系統的輸入變量為TL和TR,輸出變量為xrm,vrm,ωP和βz,屬于典型的多輸入多輸出系統。
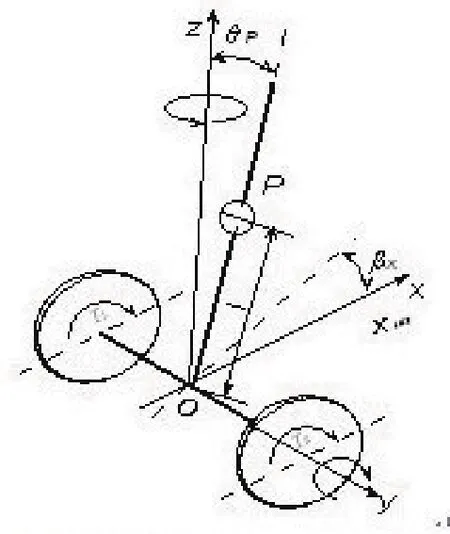
圖1 自平衡兩輪機器人系統模型
2 基于仿人智能控制的控制器設計
傳統的控制方法必須基于被控對象的精確模型,而仿人智能控制的主導思想是對人的控制結構進行宏觀模擬,然后在此基礎上進一步研究人的控制行為并加以模擬,它的主要研究目標不是被控對象,而是控制器本身如何對控制專家行為進行模擬。
為實現機器人良好的平衡穩定性控制和對參考速度的跟蹤,需要對vrm,θP分別設計一個仿人智能控制器,內含運行控制級及參數校正級,對兩個控制器的輸出設計了權重協調控制器,根據機器人小車的運動學模型可求出其左右輪速作為控制輸出。
2.1 運行控制級的設計

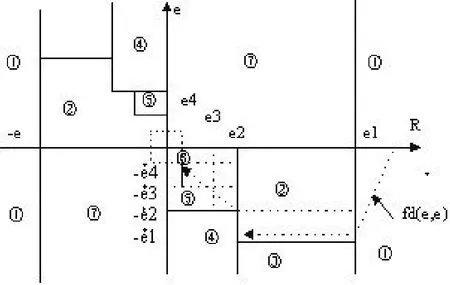
圖2 運行控制及的特征模型
1)當偏差很大時對應圖2中區域①采用Bang - Bang控制,盡快地減小誤差;
2)在偏差及偏差變化率均很小(已滿足要求)時,對應圖2中區域⑥,采用保持模態控制;
3)在偏差減小過程中,若偏差變化速度低于或等于預定的速度時,對應圖2中區域②,采用比例模態控制;
4)在偏差減小過程中,若偏差變化速度大于預定的速度時,對應圖2中區域③及區域⑤,在比例模態的基礎上引入微分模態,形成比例加微分的控制模式;
5)在偏差減小過程中引入微分模態仍不能使偏差變化速度減小到預定的速度范圍時,對應圖2中區域④,引入正反饋抑制偏差變化速度;
6)在偏差增大過程中,對應圖2中區域⑦,為了抑制偏差的增大,使偏差盡快回頭,采用比例模態加微分模態的控制模式。
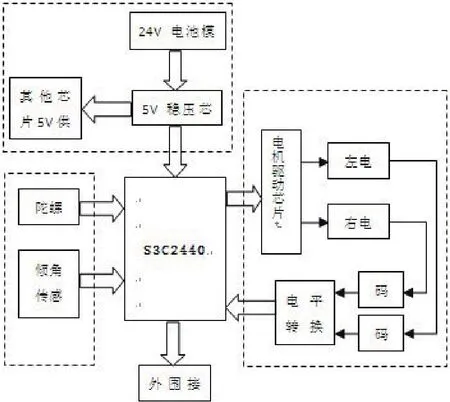
圖3 硬件框圖
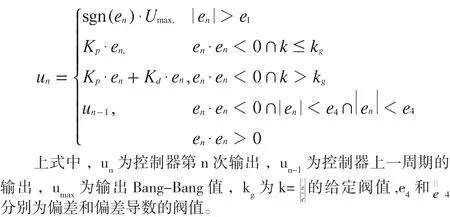
2.2 控制器實現
自平衡兩輪移動機器人控制系統由直流伺服電機、光電編碼器、陀螺儀、傾角傳感器、藍牙模塊、S3C2440主控芯片等構成。陀螺儀、傾角傳感器感知機器人姿態,主控器依據仿人智能控制算法實現機器人姿態控制由藍牙接收PC機指令,實現機器人遙控操作。硬件結構如圖3所示。
機器人軟件設計在嵌入式RT-Linux操作系統下實現。該OS具有開放源代碼、體積小、執行速度快、較好的可裁減性與移植性等特點。開發過程為,首先在PC機通過交叉編譯器GCC編譯用戶程序,生成能在目標板上執行的二進制文件,然后通過串口或NFS方式將用戶程序下載到目標板上,利用PC機對目標程序進行仿真調試。
3 實驗研究
為了對樣車試驗情況進行進一步深入的分析,我們對試驗過程中的相關數據進行了即時采集,通過藍牙適配器傳送到PC計算機進行分析處理。
取車體平臺最初傾角θP約6°(0.1弧度),初速度為0,在平衡狀態下(沒有設定)采集到的有關數據,經處理后生成的實驗曲線如圖4所示。
為使擺桿回到平衡位置,擺桿開始角速度較大,然后迅速收斂到0,擺桿角速度和角度調整時間分別為:1.3s和1.2s。通過對樣車的實際行走實驗表明,該系統可以被穩定地控制在零點位置,并且具有較強的抗干擾魯棒性,即在控制過程中對車體平臺施加擾動使擺角產生變化,當所施加的擾動使擺角產生的偏差在一定范圍內時,系統均能夠快速的恢復到平衡的零點位置。
給系統一個階躍信號,圖5是倒立擺移動速度響應曲線,其調整時間為1.3s。而移動速度的跟蹤與平衡控制是相互耦合的,移動速度跟蹤可看成是對平衡控制的擾動,使得倒立擺的移動速度趨于給定值,移動速度跟蹤相對要慢一點。
實驗數據表明:系統跟蹤速度快,控制簡單,實現了預期的控制目標。
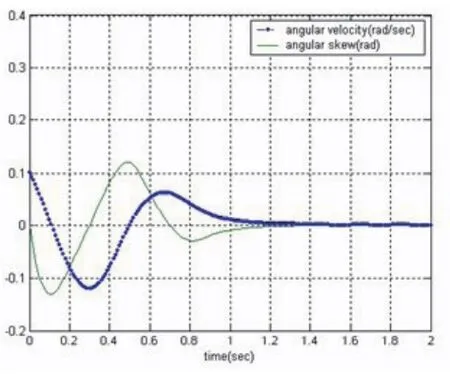
圖4 角速度與傾角曲線圖
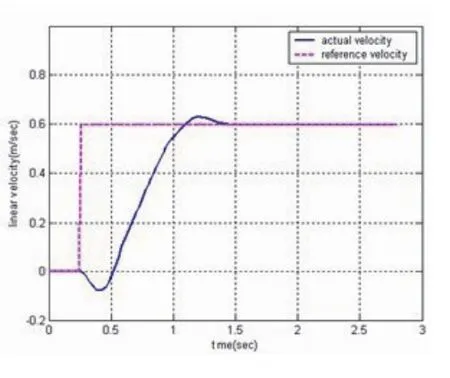
圖5 移動速度曲線圖
4 結論
本文分析了自平衡兩輪移動機器人的物理運動特性,設計了基于動覺智能圖式仿人智能控制的控制器。應用Matlab/ Simu2link仿真軟件進行了機器人的仿真實驗,實現了自平衡兩輪移動機器人系統的倒立穩定控制,并得到了較好的實驗結果。實驗證明,仿人智能控制方法模擬人控制器的動覺智能為解決復雜運動控制提供了一個有效途徑。
[1]楊興明,丁學明,張培仁,趙鵬.兩輪移動式倒立擺的運 動控制[J].合肥工業大學學報:自然科學版,2005,28(11): 1485-1488.
[2]李航,孫厚芳,韓建海,李濟順,趙書尚,林青松.兩 輪機器人行走機構的建模與實驗[J].北京理工大學學報,2004, 24(12):1058-1061.
[3]丁學明,張培仁,楊興明,徐勇明.基于單一輸入法的兩輪移動式倒立擺運動控制[J].系統仿真學報,2004,16(11): 2618-2621.
[4]雷李,李祖樞,王牛.基于仿人智能控制的足球機器人底 層運動研究[J].哈爾濱工業大學學報,2004,36(7):978-980.
[5]盛朝強,謝昭莉.基于仿人智能控制的汽車動力轉向系統 [J].重慶大學學報:自然科學版,2004,27(11):44-50.
TP242
A
1674-6708(2010)23-0246-02
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
制造技術與機床(2017年3期)2017-06-23 08:11:21
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
