隧道加熱爐串級控制系統分析
2010-06-04 10:16:18許昌學院電氣信息工程學院河南許昌461000趙正印
自動化博覽 2010年2期
關鍵詞:系統
(許昌學院 電氣信息工程學院,河南 許昌 461000)趙正印,王 武

趙正印(1980-)男,河南淅川人,講師,碩士,主要從事高能物理和電工電子方向研究。
1 引言
隧道爐加熱設備位置分散,數據點眾多,為了實現現代化的管理和發展,快速、便捷地掌握各電阻爐的實時狀況,提高管理質量和效益[1]。因此可以采用集中控制監視系統,實現對設備運行情況實時檢測和控制,很多人在系統的構建方面進行了大量研究工作[2]。
隧道加熱爐的溫度控制系統具有較大的容量滯后,采用單回路控制往往會出現較大的動態偏差,很難達到好的控制效果,為提高系統對負荷變化較大或其他擾動比較劇烈時的控制質量,采用串級控制方法往往應用到系統控制中。串級控制系統中含有主副調節器以及兩個閉合回路,特別是副調節器能夠快速及時地消除內回路擾動的影響,同時副回路的作用又相當于改善了調節對象的動態特性,因此,論文通過系統控制器設計的角度來研究隧道加熱爐溫控系統的設計和分析,并結合串級控制有效地限制被調量的動態偏差,從而達到良好的性能,為整個系統順利投產運行做前期設計準備工作。
2 加熱爐系統分析
隧道加熱爐溫度控制系統如圖1所示,原料在加熱管中從入口到出口過程中被加熱到指定的溫度。該系統從燃油燃燒到原料出口溫度有三個容量環節:爐膛、管壁和被加熱的原料。
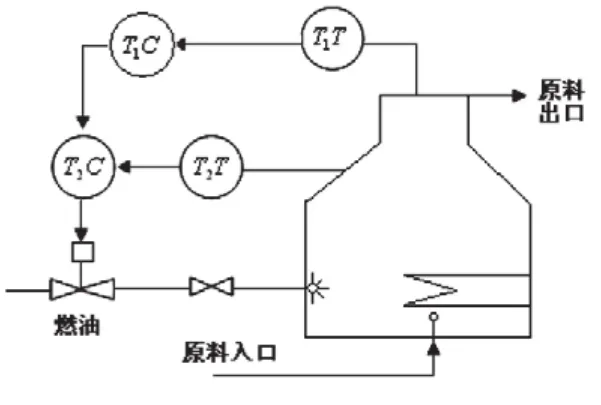
圖1 加熱爐溫度控制系統
系統的基本擾動來自兩個方面,一是原料側的擾動及負荷擾動,二是燃燒側的擾動,諸如燃油壓力、配風量等。由于該系統容量滯后較大,如采用以原料出口溫度為被控量的單回路控制系統,當燃料側擾動產生時,系統不能立即感知,直至經過較大的容量滯后反映到原料溫度發生改變時,系統控制作用才開始反應,但為時已晚。同樣,控制器的動作必須經過較大容積滯后才能開始對輸出的改變進行調整。這樣感知慢、調整慢,控制系統的品質不可能很高。對于負荷側的擾動,雖然感知較早,但是控制過程較慢。為此可增設爐膛溫度作為另一個被控參量,構成一個如圖1所示的串級控制系統,系統的原理框圖如圖2所示。
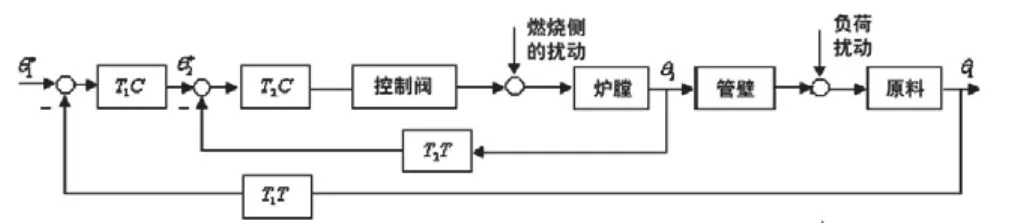
圖2 加熱爐溫度控制系統的原理框圖
3 控制系統分析和設計
3.1 串級控制系統的性能分析
串級控制系統的性能可歸納如下:① 可以顯著提高系統對二次擾動的抑制能力,甚至在二次擾動對主被控量尚未產生明顯影響時就被副回路克服了。由于副回路調節作用的加快,整個系統的調節作用加快了,對一次擾動的抑制能力也提高了。② 提高系統的動態性能。由于副回路顯著改善包括控制閥在內的副對象的特性,減小其時間常數和相位滯后,使得整個系統的動態性能有明顯的改善。③ 提高系統的工作頻率。由于副回路性能的改善,使得主控制器的比例帶可以更窄,從而提高系統的工作頻率。④ 有一定的自適應能力。在副回路作用下,包括控制閥在內的副對象在操作條件和負荷變化時,其特性變化對系統的影響顯著地削弱了,需要注意當副回路是流量環節時流量檢測線性化[3]。
3.2 主、副回路設計
串級系統對二次擾動的抑制效果最好,所以副回路應包含盡可能多的擾動,特別是把變化最劇烈、幅值最大最頻繁的主要擾動包括在副回路內。由副回路先把擾動克服到最低程度,減小其對主變量的影響,從而提高控制質量,因此,在設計串級控制系統之前,要對生產工藝中的各種擾動的來源進行分析。
在隧道加熱爐溫度控制系統中,如果燃料油的閥前壓力波動是主要擾動,當加熱物料的流量和入口溫度(負荷側擾動)相對比較穩定時,采用燃料油流量——原料出口溫度的串級控制比較合適,這時主要擾動就包含在副回路中,而副回路的控制通道又很短。
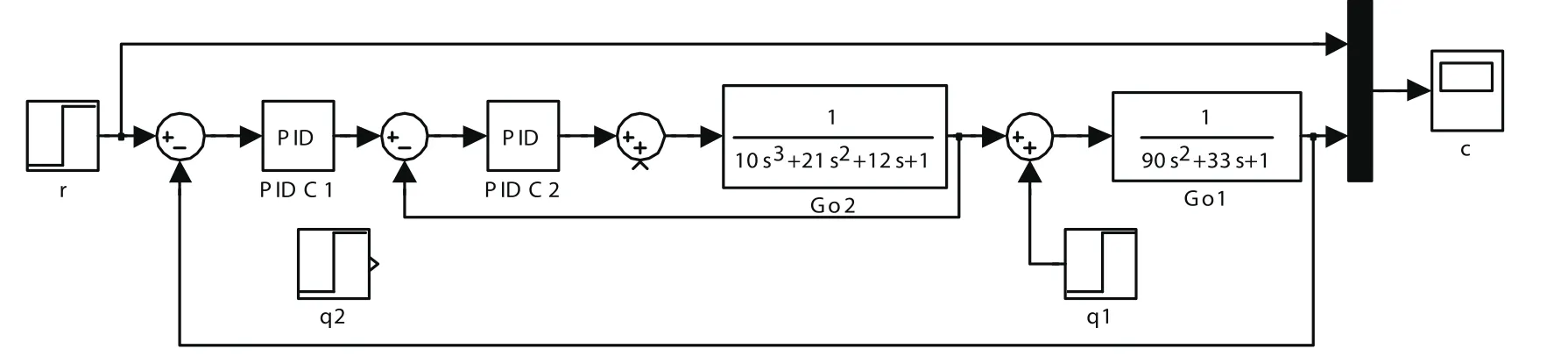
圖3 串級控制系統的Simulink模型
3.3 主、副控制器設計
一般說來主變量是控制的主要參數,其狀態是生產工藝的主要指標,而只有對主變量控制要求較高的條件下才考慮采用串級控制方式,在要求不高時采用單回路控制就可以了。因此主控制器通常采用PI控制器,在某些容量滯后較大的系統,如隧道加熱爐溫度控制系統中采用PID控制[4]。
至于副控制器,其情況有所不同,如果副被控量的控制范圍從工藝上要求不是太嚴格,那么副控制器就可以只采用比例控制,這時引入積分控制可能反而會降低副回路的響應快速性,降低串級控制的效果。從另一方面來說,不必要的副控制器積分作用的引入,會使副回路的諧振峰值加大、諧振頻率降低,從而加大了主副回路之間共振的可能。如果生產工藝對副被控量的控制要求也較高,不允許副被控量偏離期望值太大,在加熱爐的溫度控制,采用爐膛溫度作為副被控量,顯然爐膛溫度過分偏離設定值嚴重影響了爐子的安全運行,這種情況下副控制器也可以采用PI控制,但是注意到副回路的設定值是主控制器的輸出,如果主控制器的輸出在動態過程中大幅度地變化,即使副控制器采用PI控制也避免不了副被控量的大幅度變化,因此在主副控制器參數整定時也應該考慮這種情況,此處副回路控制器采用比例控制。
4 控制系統仿真分析
4.1 控制系統傳遞函數模型
隧道加熱爐系統中,考慮將燃燒室溫度作為副變量,燒成溫度為主變量,串級控制系統中主、副對象的傳遞函數和 分別為:

主、副控制器的傳遞函數 和 為:

采用傳遞函數描述的串級控制時系統的Simulink模型如圖3所示:q1為一次擾動,取階躍信號;q2為二次擾動,取階躍信號;PID C1為主控制器,采用PID控制;PID C2為副控制器,采用PID控制; 為副對象; 為主對象;r為系統輸入,取階躍信號;c為系統輸出,它連接到示波器上,可以方便地觀測輸出。
4.2 PID參數整定
采用逐次逼近法整定PID控制器的參數,并給出整定后系統的階躍響應特性曲線[5]。按照逐次逼近法,先主回路開環,按單回路方法整定副控制器,不斷地試驗,當 時,副回路階躍響應如圖4所示。
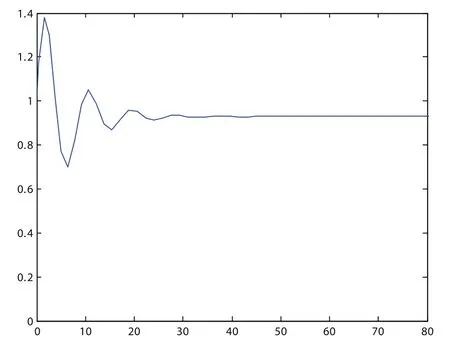
圖4 副回路階躍響應曲線
此時衰減比約為4:1,進入主回路閉環,開始整定主控制器,通過反復試驗,當場 , , 時,系統階躍響應如圖5所示[6]。
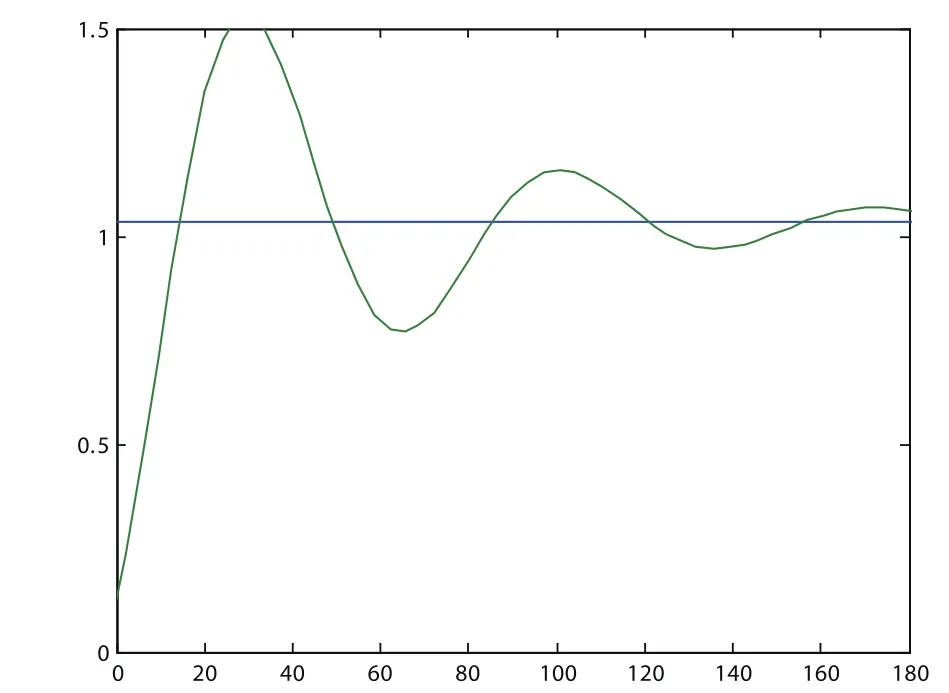
圖5 主回路階躍響應曲線
由圖5可知,系統的階躍響應效果比較理想,此時整定的主、副回路的參數比較合適。
4.3 控制性能分析
當傳輸延遲位于主回路中時,按上文中提到的PID整定參數,并設延遲時間為10s,加上二次階躍擾動,此時系統的階躍響應曲線如圖6所示[7]。
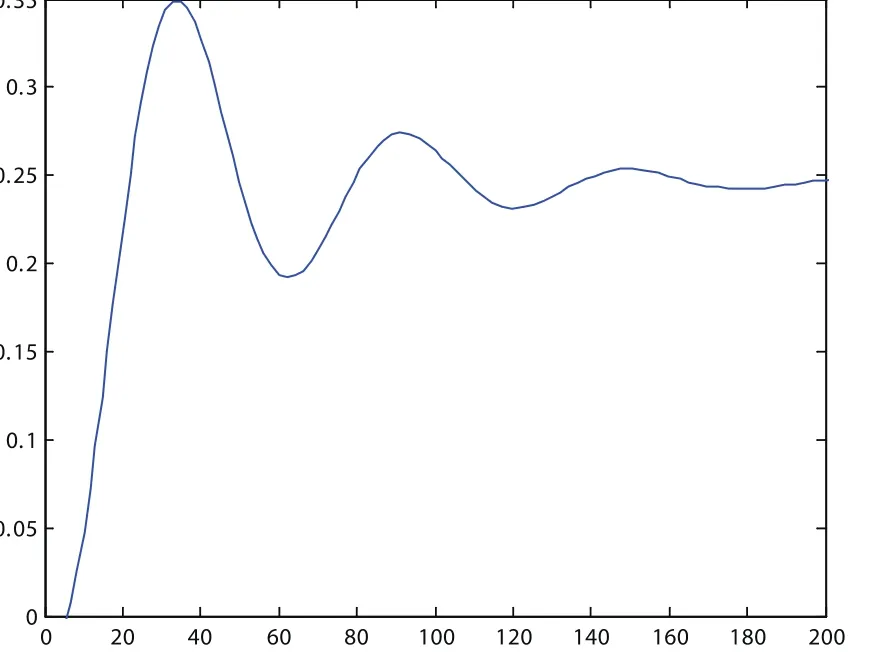
圖6 主回路二次階躍擾動響應曲線
當傳輸延遲位于副回路中時,按照前文所述方法整定主副回路的PID參數,當 , , 時,系統階躍響應曲線如圖7所示。
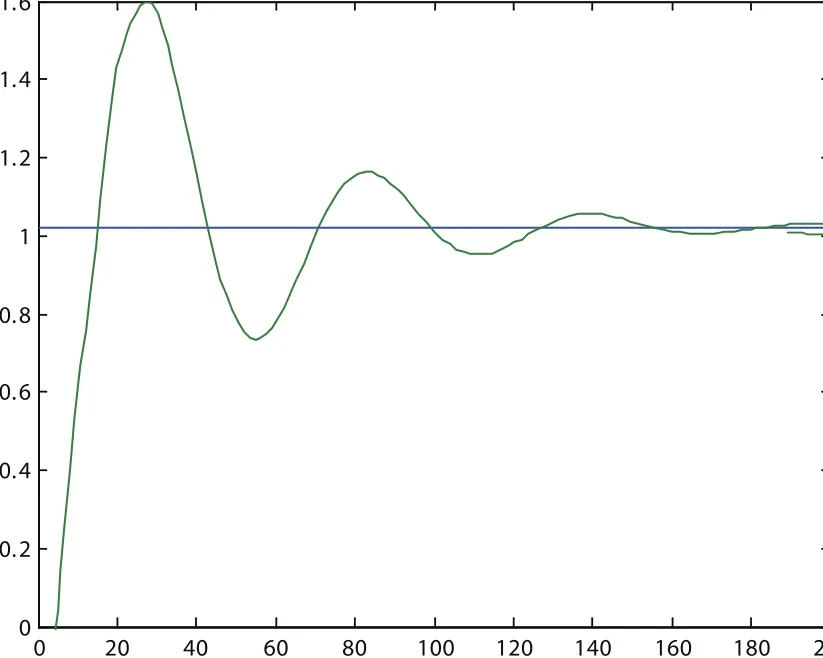
圖7 副回路二次階躍擾動響應曲線
對比延遲位于主回路中時系統對二次擾動的響應曲線圖以及延遲位于副回路中時系統對二次擾動的響應曲線,可以明顯地看出,延遲位于主回路中時通過串級控制可以很好地消除其影響[8]。
5 結語
本文以某隧道加熱爐的溫度控制系統為工程背景,通過采用串級PID對系統進行控制,通過在MATLAB環境下仿真,說明針對該系統,串級控制可以取得很好的控制效果,本論文的相關結論可有效地應用到其他帶有干擾、耦合和復雜環境和強干擾的系統,為實現有效地控制提供理論基礎。
其它作者:王武(1978-),男,甘肅蘭州人,講師,碩士,主要從事控制理論與控制工程、智能控制方向的研究
[1] 王法杰,杜京義. HMIBuilder組態軟件在隧道加熱爐控制中的應用[J]. 工業控制計算機,2008,(6): 18-21.
[2] 夏春榮. 基于PLC的FBT隧道爐設計[J]. 工業控制計算機,2006,5: 71-72.
[3] 金以慧. 過程控制[M]. 北京: 清華大學出版社. 1993.
[4] 俞金壽. 過程控制系統和應用[M]. 北京: 機械工業出版社. 2003.
[5] F. G. Shinskey著,蕭德云,呂伯明譯. 過程控制系統: 應用、設計與整定[M]. 北京: 清華大學出版社,2004.
[6] 黃忠霖. 控制系統MATLAB計算及仿真[M]. 北京: 國防工業出版社,2004.
[7] 邵裕森,戴先中. 過程控制工程[M]. 北京: 機械工業出版社,2000.
[8] 陳曉平,李長杰. MATLAB及其在電路和控制理論中的應用[M]. 北京: 中國科學技術大學出版社,2004.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
