高壓帶電作業(yè)自動剝皮器控制系統(tǒng)的研制
2010-05-18 07:28:22趙玉良陳凡明
網(wǎng)絡安全與數(shù)據(jù)管理 2010年20期
關(guān)鍵詞:信號
趙玉良 ,戚 暉 ,陳凡明 ,李 健
(1.山東電力研究院,山東 濟南 250002;2.山東魯能智能技術(shù)有限公司,山東 菏澤250002)
為了提高帶電作業(yè)的自動化水平和安全性,減輕操作人員的勞動強度和強電磁場對操作人員的人身威脅,從20世紀80年代起許多國家先后開展了帶電作業(yè)機器人的研究。2002年我國也進行了高壓帶電作業(yè)機器人產(chǎn)品化樣機的研制。目前帶電作業(yè)所用的剝皮器是高壓帶電作業(yè)機器人的專用作業(yè)工具,其主要功能是剝除10 kV配電線路絕緣外皮,為完成其他作業(yè)任務做好準備[1]。目前應用的剝皮器多是手動控制,為了適應高壓帶電作業(yè)機器人應用的要求,本文所研究的PWM功率驅(qū)動裝置的設計采用了高集成度模塊,并由ATMEGA128單片機控制,具有過流、過載、過壓保護功能。這種剝皮器遙操作控制系統(tǒng)通過遙控器進行遠程控制,比手動剝皮器更加安全、可靠,操作也更加方便,滿足了高壓帶電機器人作業(yè)任務的要求。
1 控制系統(tǒng)的總體設計
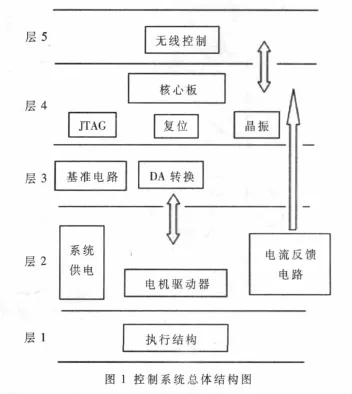
如圖1所示,將遙控剝皮器的硬件設計分成5層,各層完成功能分別是:層1是執(zhí)行結(jié)構(gòu),是機器人運動的基礎;層2是驅(qū)動系統(tǒng),包括電機驅(qū)動器、系統(tǒng)供電和電流反饋電路。由于遙控剝皮器電機的過載電流能達10 A,所以選用了具有H橋的SA60。SA60是一個PWM型功率輸出芯片,電路提供給電機的電源電壓最大可達到80 V,能連續(xù)向負載提供10 A的電流。最大模擬輸入電壓8 V,PWM載波頻率可達250 kHz,而效率可以高達97%。通過12 V串行DA轉(zhuǎn)換芯片控制電機的方向和速度,DISABLE引腳控制電機的上電和掉電。層3是系統(tǒng)接口部分,包括DA轉(zhuǎn)換接口。輸出電壓為4 V~8 V。層 4是 ATMEGA128核心板部分,包括 JTAG、復位電路和晶振;層5是系統(tǒng)功能擴展板,實現(xiàn)與遙控器的通信。由于超再生式接收模塊具有電路簡單、成本低廉等優(yōu)點,溫度適應性強,接收靈敏度更高,而且工作穩(wěn)定可靠,抗干擾能力強,所以無線接收模塊選用了抗干擾能力強的超外差接收模塊[2]。
2 電源電路設計
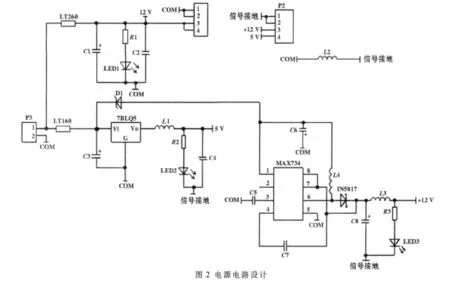
電磁干擾必須包括3個要素,即電磁干擾源、電磁干擾傳遞途徑及接收電磁干擾的響應者。這3個要素相當復雜,不同的場合有不同的表現(xiàn)。如圖2所示,為了防止電機驅(qū)動電路和控制電路相互干擾,通過電感L2實現(xiàn)不共地。在電路排版中,由于存在地線的阻抗,因而會產(chǎn)生一定的電位差。由于電位差的存在,就必然給電路的工作帶來影響。因此在電路板排版中,要一點接地。為了防止控制部分和電機驅(qū)動部分電路發(fā)生短路,在前序電路都加上自恢復保險絲。自恢復保險絲是一種新型高分子聚合材料制成的器件,當電流低于額定值時,它的電流電阻只有零點幾歐姆。而當電流大到一定程度,它的阻值迅速升高,引起發(fā)熱,而越熱,阻值越大,從而阻斷電源電流。剝皮器在作業(yè)過程中,由于受力不均勻,電壓會被拉低,所以在電源部分加上了12 V升壓芯片MAX734。由于電池充滿時,電壓能達14.4 V,超過了MAX734的供電電壓,所以在MAX734的前端反接了一個3.3 V穩(wěn)壓二極管。
3 驅(qū)動電路的設計
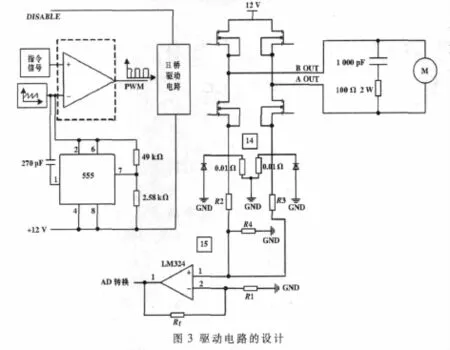
PWM功率驅(qū)動裝置利用大功率管的開關(guān)特性來調(diào)制直流電源,使其按固定的頻率通、斷。改變一個周期內(nèi)通、斷時間的長短,即改變輸出電壓的“占空比”,從而改變平均電壓,控制輸出功率。其結(jié)構(gòu)可分為兩大部分:從主電源將能量傳遞給負載的電路稱為功率轉(zhuǎn)換電路,其余部分為控制電路。改變脈沖占空比可以實現(xiàn)電動機轉(zhuǎn)速的調(diào)節(jié),但首先需要將控制轉(zhuǎn)速的指令信號轉(zhuǎn)換為具有相應占空比的脈沖信號。PWM信號產(chǎn)生的基本方法是,將控制指令信號與固定頻率的三角波或鋸齒波信號進行比較,從而產(chǎn)生占空比正比于控制指令電壓的脈沖信號。如圖3所示,SA60自帶555定時器外接270 pF的電容產(chǎn)生45 kHz的三角波,當控制指令信號電壓大于或等于三角波電壓時,輸出信號為比較器電源正電壓VCC;當控制指令信號小于三角波電壓時,輸出信號為電源地信號0 V。當電動機由于減速等原因而處于再生制動狀態(tài)時,傳動系統(tǒng)中所存儲的機械能會經(jīng)電動機轉(zhuǎn)換為電能,并通過功率器件回饋到直流母線側(cè)。這些能量一般儲存在功率主電路的儲能元件中,若不存在能量釋放電路,將會導致直流母線側(cè)電壓升高,升高的這部分電壓稱為泵升電壓。在這種情況下,如不采取保護措施,就有可能損壞功率器件或儲能元件。電路中加上了RC阻容網(wǎng)絡,以抑制瞬時泵升電壓的產(chǎn)生。電阻選用100 Ω 2 W,電容選擇 1 000 pF 100 V[3]。
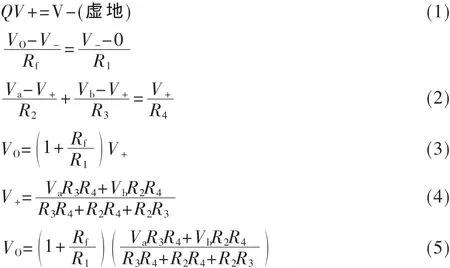
設置過電流保護電路。過電流保護電路由電流檢測環(huán)節(jié)、運算放大器、比較器等構(gòu)成。通過0.01 Ω精密電阻對SA60的ISENSE A和ISENSE B引腳電流取樣,取樣電壓經(jīng)過單電源運算放大器LM324的相加和放大10倍后,與一個2.5 V基準值共同輸入到電壓比較器LM393,比較輸出電流是否超過25 A。
下面求電壓放大器的增益計算公式:
4 單片機控制電路設計
4.1 無線接收電路
超再生式接收機具有電路簡單、成本低廉等優(yōu)點而被廣泛采用,超外差接收機雖然價格較高,但溫度適應性強,接收靈敏度更高,而且工作穩(wěn)定可靠,抗干擾能力強,所以無線接收模塊選用了抗干擾能力強的超外差接收模塊。遙控器選用和接收模塊配套的遠距離遙控器。電池使用A23電池,采用白色的優(yōu)質(zhì)塑料外殼,硅膠按鍵,帶拉桿天線。遙控器背后有活動的電池艙蓋,可以方便地更換電池。發(fā)射距離300 m~500 m。
4.2 模擬輸出電路
圖4所示,LTC1257是單電源供電,12位輸出DA轉(zhuǎn)換芯片。采用LT1021基準芯片提供8 V的參考電壓,由于VCC比VREF大 2.7 V,所以 LTC1257能正常輸出 0 V~8 V。與控制器的接口采用SPI總線方式通信,接口分別為 CLK、Din、Dout,控制方便。
4.3 ATMEGA128控制單元
ATMEGA128控制單元負責控制模擬信號的輸出、過流信息的采集和無線通信。ATmega128為基于AVR RISC結(jié)構(gòu)的8位低功耗CMOS微處理器,具有快速、靈活、集成度高,加密性強和易實現(xiàn)等諸多優(yōu)點。ATmega128具有 128 KB的系統(tǒng)內(nèi)可編程 Flash、4 KB的 E2PROM、4 KB的 SRAM、53個通用 I/O口線、32個通用工作寄存器、實時時鐘RTC、4個靈活的具有比較模式和PWM功能的定時器/計數(shù)器(T/C)、2個USART、面向字節(jié)的兩線接口TWI、8通道10位ADC、具有片內(nèi)振蕩器的可編程看門狗定時器、SPI串行端口。由于其先進的指令集以及單周期指令執(zhí)行時間,ATmega128的數(shù)據(jù)吞吐率高達1 MIPS/MHz,比普通的復雜指令集微處理器高10倍,從而可以緩解系統(tǒng)在功耗和處理速度之間的矛盾[4]。
5 斷線鉗系統(tǒng)的軟件設計
軟件設計主要包括:接收到的控制命令碼的解碼程序、電機調(diào)速的DA轉(zhuǎn)換程序和過載保護程序。
5.1 解碼程序
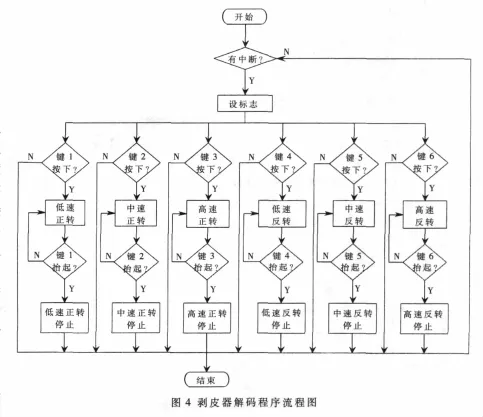
編碼芯片PT2262發(fā)出的編碼信號地址碼、數(shù)據(jù)碼、同步碼組成一個完整的碼字,解碼芯片PT2272接收到信號后,其地址碼經(jīng)過兩次比較核對后,VT腳才輸出高電平,與此同時相應的數(shù)據(jù)腳也輸出高電平。如圖4,采用中斷的方式來接收發(fā)射碼并進行解碼獲得控制命令。
5.2 DA轉(zhuǎn)換程序
如圖5所示,由于所采用的減速電機啟動和停止電流很大,可以通過改變加載電機兩端的電壓來實現(xiàn)加減速。基于簡單實用考慮,采用DA模擬量調(diào)速方式。而軟件的做法是通過設置DA轉(zhuǎn)換芯片內(nèi)部的寄存器來達到,且軟件調(diào)整量指標更高,調(diào)整更可靠、更方便、更準確。為了實現(xiàn)功率模塊的保護,當采集到過電流信號時,采用DA輸出方式控制電機的輸入電壓來調(diào)節(jié)功率模塊SA60的輸出電流。
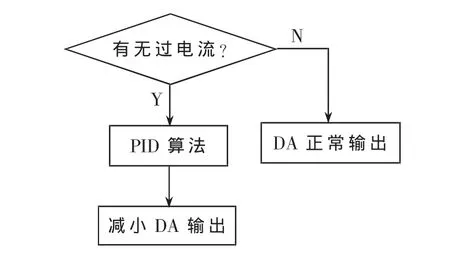
圖5 DA轉(zhuǎn)換程序流程圖
本文所介紹的ATMEGA128單片機控制的PWM功率驅(qū)動裝置,采用了集成化的芯片設計,因而整個系統(tǒng)的可靠性和集成度得到很大提高。PWM功率驅(qū)動裝置的輸出滿足了TEC模塊的電氣特性要求。另外,系統(tǒng)由ATMEGA128單片機控制,程控性好,易于操作,提高了分辨率和精度,系統(tǒng)實時運行的信息可反饋到ATMEGA128控制系統(tǒng),以對系統(tǒng)進行監(jiān)護并處理故障。在實際應用中,自動剝皮器剝皮效果良好,具有很大的實用價值。
[1]戚暉.高壓帶電作業(yè)機器人絕緣防護技術(shù)研究[J].高電壓技術(shù),2003,5.
[2]曾國華.可控扭矩電動扳手的設計[J].工具技術(shù),2002,36(5).
[3]李邦協(xié).實用電動工具手冊[M].北京:機械工業(yè)出版社,2007.
[4]馬潮.高檔8位單片機ATmega128原理與開發(fā)應用指南[M].北京:北京航空航天大學出版社,2004.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06