雷達(dá)天線運(yùn)動(dòng)參數(shù)的自動(dòng)測(cè)量
2010-04-26 02:31:50初曉軍馮電春
中國(guó)測(cè)試 2010年5期
初曉軍,王 勇,馮電春
(海軍航空工程學(xué)院青島分院,山東 青島 266041)
1 引 言
隨著部隊(duì)裝備現(xiàn)代化建設(shè)的發(fā)展,對(duì)武器裝備自動(dòng)化檢測(cè)的要求越來(lái)越高,而天線運(yùn)動(dòng)參數(shù),諸如天線俯仰運(yùn)動(dòng)范圍、方位扇掃范圍、方位扇掃速度、圓掃速度等參數(shù)的自動(dòng)化測(cè)量是組建雷達(dá)ATS的一個(gè)關(guān)鍵問(wèn)題[1]。因?yàn)榇祟?lèi)參數(shù)傳統(tǒng)的測(cè)量方法是采用量角器和秒表之類(lèi)的儀器人工完成的,操作起來(lái)不僅繁瑣而且測(cè)量數(shù)據(jù)存在較大的離散性誤差,不符合自動(dòng)測(cè)試的要求。該文利用數(shù)字技術(shù)和計(jì)算機(jī)技術(shù)實(shí)現(xiàn)了雷達(dá)天線運(yùn)動(dòng)參數(shù)的自動(dòng)測(cè)量,簡(jiǎn)化了測(cè)量方法,提高了測(cè)量速度和精度,在實(shí)際工作中取得了很大效益。
2 測(cè)量原理
2.1 天線俯仰控制的測(cè)量
雷達(dá)天線俯仰控制通常采用電位器作控制機(jī)構(gòu),通過(guò)旋轉(zhuǎn)電位器旋鈕送出不同的控制電壓控制天線俯仰停在相應(yīng)的角度。俯仰角度解調(diào)電路輸出解調(diào)電壓代表對(duì)應(yīng)的角度。
天線俯仰控制的自動(dòng)測(cè)量,采用計(jì)算機(jī)技術(shù)通過(guò)控制D/A送出俯仰控制電壓取代電位器送出的電壓控制天線俯仰運(yùn)動(dòng),通過(guò)A/D采樣俯仰解調(diào)電壓獲取天線俯仰角度值代替人工讀數(shù)。根據(jù)送不同控制電壓,采樣對(duì)應(yīng)的角度值,實(shí)現(xiàn)了天線俯仰控制的自動(dòng)測(cè)量[2]。
2.2 天線方位扇掃范圍的測(cè)量
某雷達(dá)天線方位角讀輸出采用脈沖間隔表示,即用角開(kāi)脈沖、角關(guān)脈沖兩個(gè)脈沖的時(shí)間間隔表示天線方位角度,同時(shí)雷達(dá)輸出表示天線正掃和回掃的正回掃信號(hào),高電平代表天線方位扇掃處于正掃狀態(tài),低電平代表天線方位扇掃處于回掃狀態(tài)。采用計(jì)數(shù)器錄取角開(kāi)脈沖與角關(guān)脈沖的時(shí)間間隔,并用鎖存器鎖存計(jì)數(shù)器最后的計(jì)數(shù)值,得到天線方位的實(shí)時(shí)角度Φ。此角度值隨天線方位角度的變化而實(shí)時(shí)變化。正回掃信號(hào)從低電平變化到高電平時(shí),表示天線方位處于扇掃的左邊界,錄取此刻的角度值得到天線方位左邊界的角度值ΦL。正回掃信號(hào)從高電平變化到低電平時(shí),表示天線方位處于扇掃的右邊界,錄取此刻的角度值得到天線方位右邊界的角度值ΦR,則天線方位扇掃范圍可通過(guò)ΦR-ΦL得到。
2.3 天線方位扇掃速度的測(cè)量
正回掃信號(hào)的周期,即持續(xù)一個(gè)完整的高電平、低電平的時(shí)間,代表了天線方位扇掃一次所需的時(shí)間。采用計(jì)數(shù)器得到正回掃信號(hào)的周期T,則天線方位扇掃速度w=1/T,從而實(shí)現(xiàn)了天線扇掃速度的自動(dòng)測(cè)量。
2.4 雷達(dá)天線圓掃速度的測(cè)量
天線在圓掃狀態(tài)下,天線方位角度Φ在0°≤φ<360°范圍內(nèi)與天線方位的刻度是一一對(duì)應(yīng)的,因此采用 Φ 與固定角度值 θ(0°≤θ<360°)比較,當(dāng)Φ=θ時(shí)輸出等值脈沖信號(hào),該等值脈沖信號(hào)在天線圓掃一周的情況下僅出現(xiàn)一次。兩個(gè)等值脈沖信號(hào)的間隔即為天線圓掃一周所用的時(shí)間τ,則天線圓掃速度Ω=1/τ,從而實(shí)現(xiàn)了天線圓掃速度的自動(dòng)測(cè)量。
可見(jiàn),要實(shí)現(xiàn)天線運(yùn)動(dòng)參數(shù)的自動(dòng)測(cè)量,須在電路中設(shè)計(jì)出能捕捉到天線運(yùn)動(dòng)到臨界位置的轉(zhuǎn)換信號(hào)并進(jìn)行鎖存,以便計(jì)算機(jī)能夠正確讀取和計(jì)算,從而實(shí)現(xiàn)雷達(dá)自動(dòng)測(cè)試系統(tǒng)的要求。
3 實(shí)現(xiàn)方法
3.1 系統(tǒng)框圖
天線運(yùn)動(dòng)參數(shù)測(cè)量系統(tǒng)框圖如圖1所示。圖1中,D/A轉(zhuǎn)換器完成天線俯仰控制電壓的輸出,控制天線俯仰運(yùn)動(dòng)到控制電壓對(duì)應(yīng)的角度。A/D轉(zhuǎn)換器完成天線俯仰解調(diào)電壓的采樣,以得到天線俯仰角度信息。FPGA用來(lái)實(shí)現(xiàn)計(jì)數(shù)器對(duì)天線方位角度的錄取、正回掃信號(hào)周期的計(jì)數(shù)以及天線圓掃一周所用時(shí)間的測(cè)量。模擬接口電路采用光耦合器完成模擬電路和數(shù)字電路的隔離和電平轉(zhuǎn)換[3-5]。
3.2 電路實(shí)現(xiàn)
在天線俯仰控制的自動(dòng)測(cè)量中D/A轉(zhuǎn)換器選用PXI-6704實(shí)現(xiàn),主控機(jī)通過(guò)控制PXI-6704模擬旋轉(zhuǎn)電位器旋鈕送出不同的控制電壓控制天線俯仰運(yùn)動(dòng)以停在相應(yīng)的角度。天線俯仰運(yùn)動(dòng)產(chǎn)生的俯仰解調(diào)電壓經(jīng)A/D轉(zhuǎn)換器AD390處理后變?yōu)椴⑿袛?shù)據(jù),由數(shù)據(jù)總線接口送至通信控制模塊,經(jīng)過(guò)CPU 80C186的運(yùn)算處理得到對(duì)應(yīng)的角度信息以串行數(shù)據(jù)的形式送到接口總線上,主控機(jī)通過(guò)控制PXI-8420可直接讀出該角度信息,從而實(shí)現(xiàn)天線俯仰運(yùn)動(dòng)的自動(dòng)化測(cè)量[6-7]。
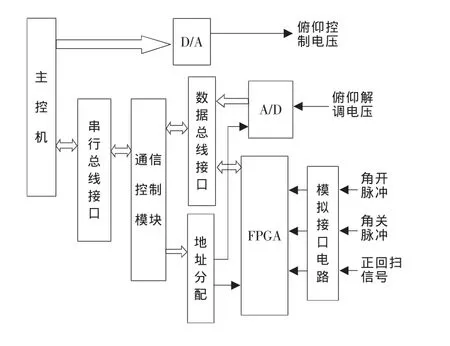
圖1 天線運(yùn)動(dòng)參數(shù)測(cè)量系統(tǒng)框圖
天線方位扇掃范圍、扇掃速度、旋轉(zhuǎn)速度的測(cè)量主要由FPGA XC3090A設(shè)計(jì)實(shí)現(xiàn),測(cè)量結(jié)果經(jīng)CPU讀取并處理后通過(guò)PXI-8420回傳到主控機(jī)。圖2為FPGA電路的實(shí)現(xiàn)框圖。圖中波門(mén)產(chǎn)生電路產(chǎn)生計(jì)數(shù)器1的計(jì)數(shù)波門(mén),角開(kāi)脈沖上升沿?cái)?shù)波打開(kāi)計(jì)數(shù)波門(mén),角關(guān)脈沖上升沿關(guān)閉計(jì)門(mén)。鎖存器1存儲(chǔ)的是角開(kāi)脈沖與角關(guān)脈沖的時(shí)間間隔(DA)。鎖存清零信號(hào)產(chǎn)生電路輸出相應(yīng)的計(jì)數(shù)器1的清零信號(hào)和鎖存器1的鎖存信號(hào)。從時(shí)間關(guān)系上,鎖存信號(hào)在清零信號(hào)之前。
鎖存信號(hào)產(chǎn)生2電路在正回掃信號(hào)的前沿產(chǎn)生鎖存器11的鎖存信號(hào),鎖存天線方位扇掃左邊界的方位角度值;在正回掃信號(hào)的后沿產(chǎn)生鎖存器12的鎖存信號(hào),鎖存天線方位扇掃右邊界的方位角度值。
角開(kāi)脈沖與角關(guān)脈沖的時(shí)間間隔(DA)與固定的角度值D通過(guò)比較器比較產(chǎn)生等值脈沖,等值脈沖二分頻后形成天線方位圓掃時(shí)間的計(jì)數(shù)波門(mén)。該計(jì)數(shù)波門(mén)與正回掃信號(hào)二分頻形成天線方位掃描時(shí)間的計(jì)數(shù)波門(mén)通過(guò)選擇器選擇其一作為計(jì)數(shù)器2的計(jì)數(shù)波門(mén)。選擇器的選擇信號(hào)由CPU的地址信號(hào)控制。鎖存器2存儲(chǔ)的為天線方位扇掃時(shí)間或天線方位圓掃時(shí)間。對(duì)應(yīng)的鎖存清零信號(hào)產(chǎn)生電路輸出對(duì)應(yīng)的鎖存信號(hào)和清零信號(hào)。
鎖存器11、鎖存器12、鎖存器2輸出的數(shù)據(jù)分別通過(guò)三態(tài)門(mén)1、三態(tài)門(mén)2、三態(tài)門(mén)3接至CPU的數(shù)據(jù)總線(DB),三態(tài)門(mén)的選通信號(hào)由地址譯碼產(chǎn)生。CPU通過(guò)數(shù)據(jù)總線讀入鎖存器的數(shù)據(jù),進(jìn)行相應(yīng)處理以求取各參數(shù)值。
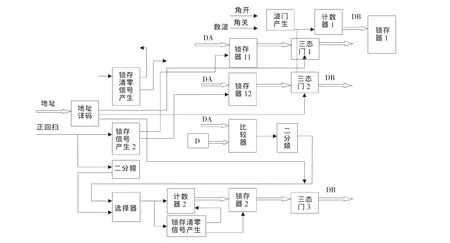
圖2 FPGA電路框圖
3.3 軟件算法與誤差分析
CPU讀回?cái)?shù)據(jù)后,通過(guò)運(yùn)算可計(jì)算出天線方位扇掃范圍、扇掃速度、圓掃速度等參數(shù)。由于時(shí)間間隔與角度成線性關(guān)系(設(shè)比例系數(shù)為k),如果計(jì)數(shù)器的時(shí)鐘頻率為f MHz,則鎖存器數(shù)值為D時(shí)對(duì)應(yīng)的角度關(guān)系為:θ=kD/f(°),這樣就可以根據(jù)計(jì)數(shù)器1的時(shí)鐘頻率、鎖存器11、鎖存器12的數(shù)值計(jì)算出天線的扇掃范圍。
同理,根據(jù)計(jì)數(shù)器2時(shí)鐘頻率f2MHz、鎖存器2的數(shù)值D2,計(jì)算出天線的扇掃速度和圓掃速度,其表達(dá)式為w1=60×106·f2/D2(次/min)。
由于采用計(jì)數(shù)器測(cè)量時(shí)存在±1誤差,同時(shí)計(jì)數(shù)器的時(shí)鐘頻率決定了測(cè)量誤差的大小。如果雷達(dá)工作時(shí)天線旋轉(zhuǎn)一周所用時(shí)間為240μs,即K值取1.5,在計(jì)數(shù)器的時(shí)鐘頻率為20MHz的情況下,測(cè)量天線扇掃范圍的誤差只有0.15°;在計(jì)數(shù)器2時(shí)鐘頻率為1250Hz,鎖存器2的數(shù)值D最大值為5000時(shí),測(cè)量天線的扇掃速度和圓掃速度的誤差只有0.003次/min,這遠(yuǎn)遠(yuǎn)低于技術(shù)說(shuō)明書(shū)的誤差要求。
4 結(jié)束語(yǔ)
天線運(yùn)動(dòng)參數(shù)自動(dòng)化測(cè)量的設(shè)計(jì)方案已在某型雷達(dá)的自動(dòng)測(cè)試系統(tǒng)的組建中得到具體應(yīng)用,同傳統(tǒng)的手工測(cè)量方法相比,該方法簡(jiǎn)化了測(cè)量步驟,降低了人為因素的影響,提高了測(cè)量速度和精度,可靠性高,穩(wěn)定性強(qiáng),具有較高的應(yīng)用價(jià)值,這不僅為雷達(dá)設(shè)備的自動(dòng)測(cè)試提供了通用的設(shè)計(jì)方法,而且可為其他電子設(shè)備ATS的組建提供有益的借鑒。
[1] 李淑華,彭志剛,郭微波.航空雷達(dá)設(shè)備[M].青島:海軍航空工程學(xué)院青島分院出版社,2008.
[2] 初曉軍,王 勇.航空雷達(dá)檢測(cè)技術(shù)[M].青島:海軍航空工程學(xué)院青島分院出版社,2009.
[3] 王 勇,李淑華,王守權(quán).雷達(dá)自動(dòng)測(cè)試診斷系統(tǒng)的組建與實(shí)現(xiàn)[J].儀器儀表學(xué)報(bào),2006(12):32-34.
[4] 王 勇,王晟達(dá),彭 芳,等.基于PXI和GPIB總線雷達(dá)自動(dòng)測(cè)試系統(tǒng)的設(shè)計(jì)[J].空軍工程大學(xué)學(xué)報(bào),2004(12):57-61.
[5]李洪烈.某型雷達(dá)自動(dòng)測(cè)試系統(tǒng)關(guān)鍵技術(shù)研究[J].電子測(cè)量與儀器學(xué)報(bào),2006(20):1344-1347.
[6] 楊江平.電子裝備維修技術(shù)與應(yīng)用[M].北京:國(guó)防工業(yè)出版社,2006.
[7] 宋萬(wàn)杰,羅 風(fēng),吳順君.CPLD技術(shù)及其應(yīng)用[M].西安:西安電子科技大學(xué)出版社,1999.
[8] 丁鷺飛,耿富錄.雷達(dá)原理[M].西安:西安電子科技大學(xué)出版社,2000.
[9]Skolnik,M.I.雷達(dá)手冊(cè)[M].王 軍,譯.北京:電子工業(yè)出版社,2003.
[10]丁鷺飛,張 平.雷達(dá)系統(tǒng)[M].西安:西北電訊工程學(xué)院出版社,1984.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00