高超聲速一體化飛行器冷流狀態(tài)氣動特性研究
2010-04-15 10:54:34羅世彬王振國
實(shí)驗(yàn)流體力學(xué) 2010年1期
關(guān)鍵詞:發(fā)動機(jī)模型
金 亮 ,柳 軍,羅世彬 ,王振國
(國防科技大學(xué)航天與材料工程學(xué)院,湖南長沙 410073)
0 引 言
高超聲速吸氣式飛行器只能在高馬赫數(shù)下工作,因此需要依靠助推火箭加速到工作馬赫數(shù)。在助推火箭工作過程中,往往需要將進(jìn)氣道入口關(guān)閉。當(dāng)達(dá)到工作馬赫數(shù)后,助推火箭與飛行器分離,飛行器進(jìn)氣道開啟,發(fā)動機(jī)內(nèi)部流場開始建立。當(dāng)發(fā)動機(jī)流場穩(wěn)定之后,發(fā)動機(jī)噴燃料、點(diǎn)火,飛行器開始自主飛行。從助推火箭分離到發(fā)動機(jī)點(diǎn)火的短時間內(nèi),飛行器經(jīng)歷三種工作狀態(tài):發(fā)動機(jī)關(guān)閉、發(fā)動機(jī)通流和發(fā)動機(jī)點(diǎn)火。在三種工作狀態(tài)轉(zhuǎn)變過程中,飛行器所受的合力與合力矩變化較大,并且由于在高超聲速飛行條件下氣動控制面效率較低,需要飛行器具有較好的飛行穩(wěn)定性,因此研究發(fā)動機(jī)工作狀態(tài)轉(zhuǎn)變過程中的飛行可控性能對于高超聲速飛行器一體化構(gòu)型設(shè)計具有重要意義。
隨著超燃沖壓發(fā)動機(jī)技術(shù)的發(fā)展,國內(nèi)[1-4]對高超聲速一體化飛行器構(gòu)型設(shè)計開展了較多的研究工作。高超聲速飛行器一體化構(gòu)型設(shè)計的技術(shù)難點(diǎn)在于如何獲得準(zhǔn)確的氣動與推進(jìn)數(shù)據(jù)。筆者在現(xiàn)有超燃沖壓發(fā)動機(jī)研究成果的基礎(chǔ)上,設(shè)計了一種升力體飛行器,通過開展縮比模型風(fēng)洞實(shí)驗(yàn)與數(shù)值模擬,對其在發(fā)動機(jī)關(guān)閉和發(fā)動機(jī)通流狀態(tài)下的氣動特性進(jìn)行研究。
1 實(shí)驗(yàn)?zāi)P?/h2>
飛行器縮比模型冷流實(shí)驗(yàn)在中國空氣動力研究與發(fā)展中心(CARDC)的FD-20A高超聲速風(fēng)洞上進(jìn)行。實(shí)驗(yàn)裝置主要包括飛行器模型、六分量測力天平和模型尾支桿,如圖1所示。受風(fēng)洞尺寸限制,縮比模型后體尺寸較小,為了避免破壞飛行器后體型面以及流場,將支桿設(shè)計成從模型底部上方穿出,為了保證尾支桿有足夠的強(qiáng)度并且在實(shí)驗(yàn)時不與模型發(fā)生碰撞,對模型的后部上表面做了修形,通過對上表面突起修形進(jìn)行數(shù)值模擬,結(jié)果表明表面突起對飛行器整體氣動性能的影響較小,可以忽略不計。

圖1 實(shí)驗(yàn)?zāi)P褪疽鈭DFig.1 Schematic of experimental model
進(jìn)氣道唇口部件可以更換,以實(shí)現(xiàn)發(fā)動機(jī)關(guān)閉以及發(fā)動機(jī)通流實(shí)驗(yàn)狀態(tài)的轉(zhuǎn)換,如圖2所示。實(shí)驗(yàn)中采用彩色紋影系統(tǒng)進(jìn)行流場的顯示和記錄,采用一臺專門研制的六分量桿式應(yīng)變天平對氣動力和力矩進(jìn)行測量,其中阻力的正方向?yàn)閺念^部指向尾部,升力的正方向?yàn)樨Q直向上,俯仰力矩為正代表低頭力矩。

圖2 發(fā)動機(jī)關(guān)閉與發(fā)動機(jī)通流狀態(tài)示意圖Fig.2 Cowl-closed and cowl-opening configurations
風(fēng)洞實(shí)驗(yàn)條件為:來流馬赫數(shù)5.85,來流靜壓2440Pa,來流靜溫 61.3K,飛行器迎角分別為-3°、-1°、0°、1°、2°、3°、4°和 6°。
2 計算模型
復(fù)雜外形多區(qū)流場計算對解算器的魯棒性和精度要求較高,選擇Roe通量差分分裂格式進(jìn)行對流項求解,空間具有二階精度,湍流模型采用SST k-ω湍流模型。由于飛行器外形較為復(fù)雜,為了減少網(wǎng)格生成的工作量,在計算模型中沒有考慮垂直尾翼,計算的簡化模型如圖3所示,由于本文主要對飛行器縱向氣動性能進(jìn)行研究,垂尾對飛行器縱向氣動性能的影響較小,因此簡化計算模型可以滿足計算需要。

圖3 計算模型示意圖Fig.3 Schematic of computational model
沒有考慮側(cè)滑角的影響,流場具有對稱性,因此計算區(qū)域只選擇飛行器的一半流場,計算網(wǎng)格由Gridgen生成,其中發(fā)動機(jī)關(guān)閉狀態(tài)網(wǎng)格數(shù)目為301萬,發(fā)動機(jī)通流狀態(tài)網(wǎng)格數(shù)目為330萬,如圖4所示。
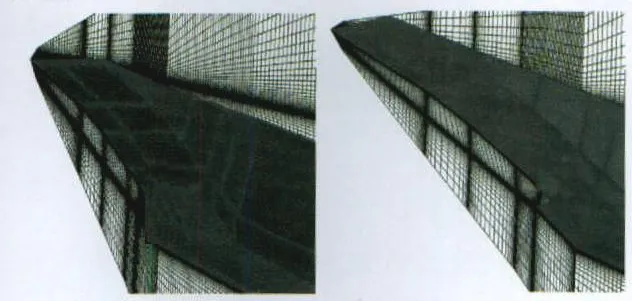
圖4 發(fā)動機(jī)關(guān)閉與發(fā)動機(jī)通流狀態(tài)計算網(wǎng)格Fig.4 Cowl-closed and cowl-opening grids
邊界條件為:入口采用超聲速入口條件,來流參數(shù)與風(fēng)洞實(shí)驗(yàn)條件相同,計算來流迎角分別為-3°、-1°、0°、1°、3°、6°,出口采用超聲速出口條件,壁面采用無滑移絕熱壁面邊界條件,對稱面采用對稱邊界條件。算例的CFL數(shù)為1,計算約2000步后收斂。
3 結(jié)果與討論
3.1 全機(jī)流場特征
圖5所示為發(fā)動機(jī)關(guān)閉狀態(tài)下的流場紋影照片,來流迎角為0°,可見在進(jìn)氣道唇口附近產(chǎn)生了較為復(fù)雜的波系結(jié)構(gòu),圖6為計算得到的飛行器中心對稱面以及側(cè)板對稱面內(nèi)的馬赫數(shù)等值線分布,將二者相結(jié)合可對各道激波進(jìn)行分辨。圖5與6中的①、②、③分別為前體產(chǎn)生的三道壓縮激波,④為側(cè)板下緣激波,⑤為側(cè)板對稱面內(nèi)側(cè)板下緣氣流經(jīng)過進(jìn)氣道外罩板后產(chǎn)生的壓縮激波,⑥為中心對稱面內(nèi)氣流經(jīng)過進(jìn)氣道外罩板后產(chǎn)生的壓縮激波,由于側(cè)板下緣壓縮效果要小于前體三道斜坡的壓縮效果,因此⑤的角度要小于⑥,⑦為飛行器上表面產(chǎn)生的壓縮激波。

圖5 發(fā)動機(jī)關(guān)閉狀態(tài)下流場紋影照片F(xiàn)ig.5 Schlieren image of cowl-closed configuration

圖6 發(fā)動機(jī)關(guān)閉狀態(tài)下流場激波結(jié)構(gòu)Fig.6 CFD solution for cowl-closed configuration
圖7為發(fā)動機(jī)通流狀態(tài)下得到的流場紋影照片,來流迎角為0°,與圖5相比,進(jìn)氣道唇口附近的波系結(jié)構(gòu)較為簡單。圖8為飛行器中心對稱面以及側(cè)板對稱面內(nèi)的馬赫數(shù)等值線分布,兩圖中的①、②、③分別為前體產(chǎn)生的3道壓縮激波,④為氣流經(jīng)過進(jìn)氣道外罩板后產(chǎn)生的壓縮激波,由于發(fā)動機(jī)并沒有采用透明材料設(shè)計,因此在紋影照片中無法看到發(fā)動機(jī)內(nèi)部的波系結(jié)構(gòu),⑤為飛行器上表面產(chǎn)生的壓縮激波。
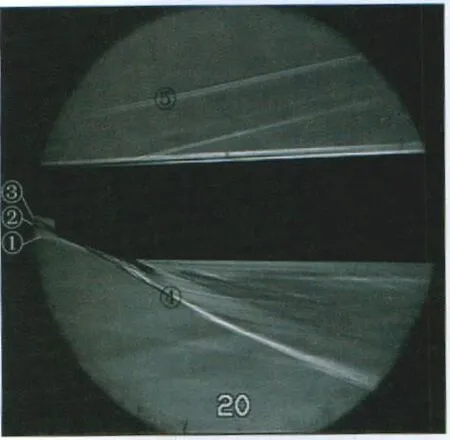
圖7 發(fā)動機(jī)通流狀態(tài)下流場紋影照片F(xiàn)ig.7 Schlieren image of cowl-opening configuration

圖8 發(fā)動機(jī)通流狀態(tài)下流場激波結(jié)構(gòu)Fig.8 CFD solution for cowl-opening configuration
3.2 全機(jī)氣動特性
通流前后,飛行器氣動性能變化情況見圖 9,CFD結(jié)果與實(shí)驗(yàn)結(jié)果基本吻合。當(dāng)發(fā)動機(jī)從關(guān)閉狀態(tài)變?yōu)橥鳡顟B(tài)時,阻力、升力與抬頭力矩均減小,這主要是由于在發(fā)動機(jī)關(guān)閉狀態(tài),進(jìn)氣道外罩板所承受的阻力最大,當(dāng)外罩板下翹,發(fā)動機(jī)由關(guān)閉狀態(tài)變?yōu)橥鳡顟B(tài)后,外罩板對來流壓縮角減小,因此阻力和升力均大幅減小,對質(zhì)心的抬頭力矩減小,并且由于內(nèi)部流動建立起來之后,機(jī)身后體壓強(qiáng)升高,對質(zhì)心的低頭力矩增加,因此開啟進(jìn)氣道使飛行器產(chǎn)生低頭的趨勢。

圖9 飛行器基本縱向氣動特性Fig.9 Basic longitudinal aerodynamic characteristics
3.3 質(zhì)心位置選擇
在工程實(shí)際中,常通過判斷壓心或者焦點(diǎn)與質(zhì)心的相對位置,來對飛行器縱向靜穩(wěn)定性進(jìn)行分析。壓心是空氣動力的作用中心,當(dāng)迎角變化,壓心位置也隨之變化。在任意迎角條件下,飛行器對壓心的力矩均為零。而焦點(diǎn)的定義為,在任意迎角條件下,飛行器對焦點(diǎn)的俯仰力矩均相同。在機(jī)體坐標(biāo)系下定義一特殊點(diǎn)Cp(xcp,ycp),在迎角為 α 1以及 α 2狀態(tài)下,使飛行器對點(diǎn)Cp產(chǎn)生的俯仰力矩都為零,可見該點(diǎn)定義既不同于壓心,也不同于焦點(diǎn)。設(shè)質(zhì)心Cg坐標(biāo)為(xg,yg),當(dāng)來流迎角為α 1時飛行器對質(zhì)心Cg產(chǎn)生的俯仰力矩為 Mz,α 1(G),飛行器軸向力為 Fa,α 1,法向力為 Fn,α 1,則對點(diǎn) Cp產(chǎn)生的俯仰力矩 Mz(Cp)為:

在二維笛卡爾坐標(biāo)系中,當(dāng)質(zhì)心已知時,上式為xcp,ycp應(yīng)滿足的直線方程,當(dāng)來流迎角為 α 2時,方程變?yōu)椋?/p>

上述兩條直線的交點(diǎn),即為Cp。飛行器對任意一點(diǎn)A(xA,yA)的俯仰力矩為:

則俯仰力矩對迎角的導(dǎo)數(shù)為:

若飛行器為靜穩(wěn)定狀態(tài)[5],則有:

進(jìn)一步可寫成:

飛行器如保持靜穩(wěn)定,則質(zhì)心坐標(biāo)必須滿足:

由公式(2)可分別畫出4個迎角條件飛行器俯仰力矩為零時矩心滿足的直線方程,這些直線的交點(diǎn)即為Cp,如圖10所示。可見各直線交點(diǎn)Cp位置基本相同,進(jìn)而可求出飛行器保持靜穩(wěn)定狀態(tài)下質(zhì)心選擇范圍,如圖10中陰影區(qū)域所示。
4 結(jié) 論
筆者采用數(shù)值模擬和風(fēng)洞實(shí)驗(yàn)方法,分別得到了發(fā)動機(jī)關(guān)閉以及發(fā)動機(jī)通流狀態(tài)下的全機(jī)氣動參數(shù),數(shù)值模擬結(jié)果與實(shí)驗(yàn)結(jié)果基本吻合。研究結(jié)果表明:在發(fā)動機(jī)關(guān)閉狀態(tài)下,飛行器阻力和抬頭力矩較大,進(jìn)氣道開啟之后,阻力、升力與抬頭力矩均降低,但此時飛行器仍具有較大的配平迎角。在進(jìn)一步的研究中,可考慮對飛行器各部件進(jìn)行改型設(shè)計來降低飛行器的抬頭力矩。

圖10 飛行器靜穩(wěn)定條件下的質(zhì)心選擇范圍Fig.10 CG location under longitudinal stable condition
致謝:
感謝中國空氣動力研究與發(fā)展中心超高速空氣動力研究所的許曉斌高工、舒海峰助理研究員、孫良寶工程師提供的縮比模型實(shí)驗(yàn)數(shù)據(jù)。
[1]葉友達(dá),王振亞,盧笙.高超聲速飛行器一體化流場數(shù)值模擬研究[C]//全國流體力學(xué)青年研討會,2003.
[2]賀元元,樂嘉陵,倪鴻禮.吸氣式高超聲速機(jī)體/推進(jìn)一體化飛行器數(shù)值和試驗(yàn)研究[J].實(shí)驗(yàn)流體力學(xué),2007,21(2):29-34.
[3]羅世彬.高超聲速飛行器機(jī)體/發(fā)動機(jī)一體化及總體多學(xué)科設(shè)計優(yōu)化方法研究[D].國防科學(xué)技術(shù)大學(xué)研究生院,2004.
[4]車競,唐碩.高超聲速飛行器機(jī)身/超燃沖壓發(fā)動機(jī)一體化設(shè)計研究[J].實(shí)驗(yàn)流體力學(xué),2006,20(2):41-44.
[5]熊海泉,劉昶,鄭本武.飛機(jī)飛行動力學(xué)[M].航空工業(yè)出版社,1990.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
