基于TMS320F2812的矢量控制系統(tǒng)軟件設(shè)計(jì)
2010-04-08 02:31:06華中科技大學(xué)控制科學(xué)與工程系湖北武漢430074程善美
電氣自動(dòng)化 2010年3期
關(guān)鍵詞:系統(tǒng)
華中科技大學(xué)控制科學(xué)與工程系(湖北武漢 430074) 龔 博 程善美
南京電子技術(shù)研究所(江蘇南京 210013) 吳 冰
0 引言
本文構(gòu)建了一種使用TMS320F2812為控制芯片的異步電動(dòng)機(jī)矢量控制系統(tǒng)。TMS320F2812是TI公司推出的一款用于控制系統(tǒng)的高性能、多功能、高性價(jià)比的32位定點(diǎn)DSP芯片,芯片上集成了多種外設(shè),尤其是兩個(gè)事件管理器為電動(dòng)機(jī)以及功率變換控制提供了很大的便利,TMS320F2812可以采用C語(yǔ)言編程,它的C編譯器支持ANSI C標(biāo)準(zhǔn),使得編程相對(duì)簡(jiǎn)單,可以使程序員有更多的時(shí)間開發(fā)新的數(shù)字算法,針對(duì)TMS320F2812的這些特點(diǎn)本文詳細(xì)介紹了控制系統(tǒng)的軟件設(shè)計(jì)[3]。
1 矢量控制結(jié)構(gòu)
矢量控制系統(tǒng)結(jié)構(gòu)如圖1所示。其工作原理為:首先對(duì)定子電流進(jìn)行采樣,經(jīng)過(guò)坐標(biāo)變換后,得到勵(lì)磁電流和轉(zhuǎn)矩電流的反饋值。把采樣獲得電動(dòng)機(jī)實(shí)際轉(zhuǎn)速與給定轉(zhuǎn)速的差值經(jīng)過(guò)速度控制器調(diào)節(jié)后,得到轉(zhuǎn)矩分量的給定值。將給定值與反饋值的差值經(jīng)過(guò)電流控制器的調(diào)節(jié)后得到兩相旋轉(zhuǎn)坐標(biāo)系的電壓分量,進(jìn)行反Park變換后,得到兩相靜止坐標(biāo)系下的兩個(gè)電壓分量,最后經(jīng)過(guò)SVPWM調(diào)制,控制電力電子器件的開關(guān)導(dǎo)通狀態(tài)輸出PWM信號(hào),從而使電動(dòng)機(jī)得到很好的控制。
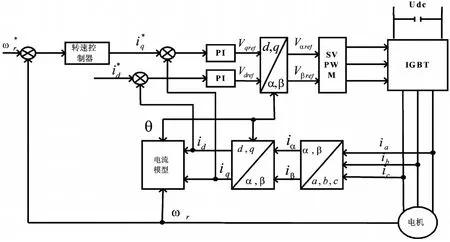
圖1 矢量控制系統(tǒng)結(jié)構(gòu)圖
一個(gè)矢量控制系統(tǒng)的構(gòu)成如圖2所示。矢量控制系統(tǒng)由控制和功率變換兩大部分組成。其控制部分由TMS320LF2812小系統(tǒng)、電流檢測(cè)和調(diào)理電路、光電編碼器接口電路等組成。異步電動(dòng)機(jī)的速度檢測(cè)采用光電編碼器,光電編碼器輸出的兩路正交信號(hào)送給事件管理器中QEP模塊的引腳QEP1和QEP2,QEP模塊的計(jì)數(shù)器對(duì)引腳QEP1和QEP2的上升沿和下降沿進(jìn)行計(jì)數(shù)。電流檢測(cè)采用電流霍爾傳感器,由于異步電動(dòng)機(jī)三相電流是平衡的,因而只需檢測(cè)其中的兩相定子電流。其功率變換部分由整流橋、濾波電容和逆變器等組成。
2 系統(tǒng)軟件設(shè)計(jì)
矢量控制系統(tǒng)程序包括主程序和中斷服務(wù)子程序,主程序進(jìn)行系統(tǒng)以及各個(gè)模塊控制寄存器初值設(shè)置,并且使能相應(yīng)的中斷。中斷服務(wù)子程序是系統(tǒng)的主要部分,矢量控制系統(tǒng)的算法都在其中實(shí)現(xiàn),主要包括處理A、B兩相的采樣電流,根據(jù)編碼器傳遞的信息計(jì)算當(dāng)前的轉(zhuǎn)速和機(jī)械角速度,進(jìn)行坐標(biāo)變換,計(jì)算同步角速度,以及PI控制器、SVPWM算法的實(shí)現(xiàn)等。
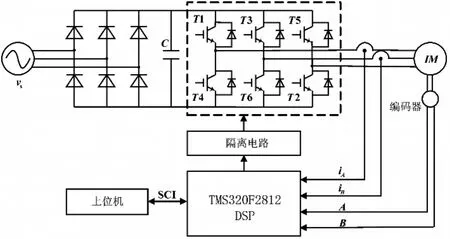
圖2 矢量控制系統(tǒng)的構(gòu)成
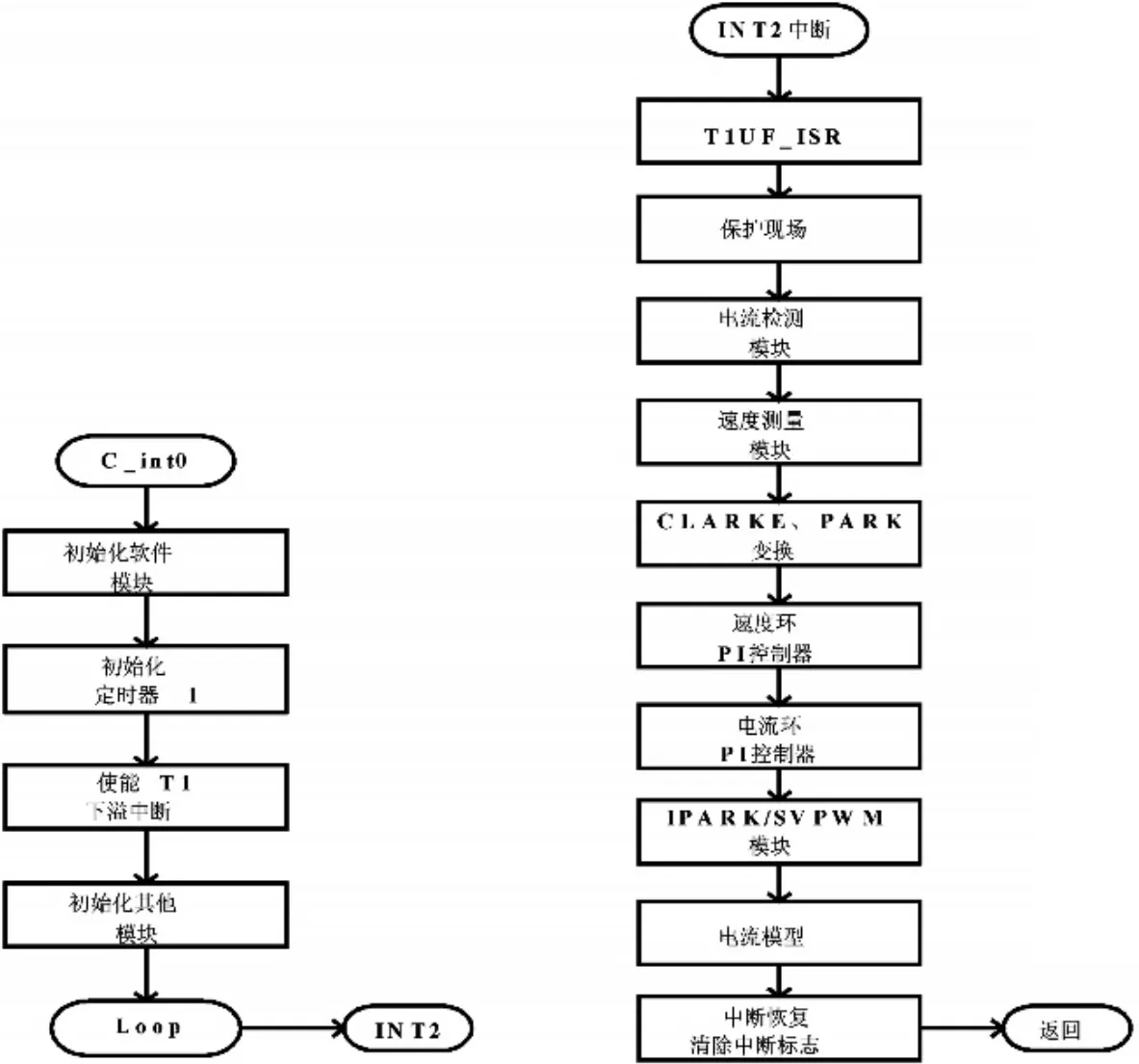
圖3 矢量控制系統(tǒng)程序控制流程圖
其中坐標(biāo)變換、電流模型以及SVPWM模塊都需要很大的運(yùn)算量,F(xiàn)2812的最高頻率可以達(dá)到150MHz,精度達(dá)到32位,完全能達(dá)到控制系統(tǒng)的要求[4,5]。系統(tǒng)中這些算法均在T1下溢中斷中完成,TMS320F2812時(shí)鐘頻率設(shè)置為150MHz,電流環(huán)周期為100us,轉(zhuǎn)速環(huán)周期為1ms。系統(tǒng)的程序控制流程如圖3所示。
2.1 異步電機(jī)的標(biāo)幺化模型
由于矢量控制系統(tǒng)各個(gè)變量的大小范圍不一,為了簡(jiǎn)化計(jì)算,以相同的精度表示和計(jì)算各種變量,對(duì)系統(tǒng)的變量采用標(biāo)幺值的形式來(lái)表示。標(biāo)幺值定義為實(shí)際值與基值的比值,變量的標(biāo)幺值是沒(méi)有單位的。
通過(guò)選擇適當(dāng)?shù)幕担梢园褜?shí)際值相差很大的各種變量轉(zhuǎn)化到同一較小的數(shù)量范圍內(nèi),非常有利于數(shù)字化處理和提高系統(tǒng)的穩(wěn)定性和精度。
通常情況下,電流、電壓的基值是其額定值的幅值;角速度的基值是轉(zhuǎn)子額定電氣角速度;磁鏈基值是電壓基值與角速度基值的比值,其具體表達(dá)如下:

確定了基值之后,就可以用標(biāo)幺值來(lái)表示各個(gè)變量:

式中,Un,In,fn分別表示電機(jī)電壓,電流,頻率的額定值;Ub,Ib,!b,#b分別表示電機(jī)電壓,電流,角頻率,磁鏈的基值;u,i,!,#分別表示電機(jī)電壓,電流,轉(zhuǎn)速,磁鏈的實(shí)際值分別表示電壓,電流,轉(zhuǎn)速,磁鏈的標(biāo)幺值。
2.2 數(shù)字定標(biāo)及Q格式選擇
TMS320F2812 DSP芯片,采用定點(diǎn)數(shù)進(jìn)行運(yùn)算,操作數(shù)為整數(shù)。但是,系統(tǒng)中參與運(yùn)算的數(shù)并不全是整數(shù),更多的是會(huì)出現(xiàn)各種小數(shù)。定點(diǎn)DSP芯片并不能處理各種小數(shù),這就要求用不同Q格式來(lái)表示不同大小不同精度的小數(shù)。
TI公司為用戶提供了一種稱為IQmath的專用定點(diǎn)數(shù)學(xué)函數(shù)庫(kù),可基于DSP硬件和編譯器優(yōu)化算法性能。IQmath由高度優(yōu)化的高精度數(shù)學(xué)函數(shù)集構(gòu)成,可以用C/C++設(shè)計(jì)將浮點(diǎn)算法無(wú)縫地轉(zhuǎn)化成DSP的定點(diǎn)代碼。IQmath程序使得以類浮點(diǎn)格式編寫定點(diǎn)程序成為可能,該程序還能處理在定點(diǎn)編程中需要額外考慮的飽和及溢出問(wèn)題。而且,IQmath程序特別適用于需要極高執(zhí)行速度和運(yùn)算精度的計(jì)算密集型實(shí)時(shí)應(yīng)用。
在程序中使用GLOBAL_Q格式可以方便編程和調(diào)試,默認(rèn)的GLOBAL_Q格式為Q24格式,用戶也可以在IQmathLib.h頭文件中定義其他的GLOBAL_Q格式,可供選擇的范圍為Q1~Q30格式。在矢量控制系統(tǒng)中GLOBAL_Q格式設(shè)置為Q24格式,絕大部分的參入運(yùn)算的數(shù)都用該格式表示,其表示的范圍為-128~127.99999994,表示的精度為0.00000006,能同時(shí)滿足數(shù)值范圍和精度的要求。
2.3 軟件的模塊化結(jié)構(gòu)
TI公司針對(duì)數(shù)字控制系統(tǒng)提出了相應(yīng)的軟件模塊化標(biāo)準(zhǔn),它要求一個(gè)模塊內(nèi)程序的修改不影響其它程序,這樣建立的程序模塊可以獨(dú)立運(yùn)行、調(diào)試和修改,形成具有特定功能的程序模塊。C語(yǔ)言模塊一般包含接口和實(shí)現(xiàn)兩個(gè)部分,一個(gè)C語(yǔ)言模塊也就是配備一個(gè)或多個(gè)接口的實(shí)現(xiàn)。接口部分包括類型定義,以及函數(shù)、常數(shù)及變量等的聲明,通常放在頭文件中。在系統(tǒng)軟件設(shè)計(jì)中,每一個(gè)需要軟件實(shí)現(xiàn)的部分都對(duì)應(yīng)一個(gè)程序模塊來(lái)實(shí)現(xiàn)其算法功能,使用時(shí),只需要設(shè)定相應(yīng)的接口,就可以調(diào)用已有的模塊,既可以方便調(diào)試,同時(shí)也提高了程序的可移植性和可讀性。
在本文提到的矢量控制系統(tǒng)共分成了速度檢測(cè)模塊,電流檢測(cè)模塊,坐標(biāo)變換模塊,PI控制器模塊,電流模型模塊,通信模塊以及SVPWM模塊等部分,這些模塊的每一源文件都有一個(gè)頭文件與之對(duì)應(yīng),源文件用來(lái)實(shí)現(xiàn)算法,而頭文件用來(lái)定義接口以及內(nèi)部變量。主程序中包含 (#include)了模塊提供的接口文件 (頭文件),就可以直接調(diào)用模塊的具體實(shí)現(xiàn)。圖4中以調(diào)用速度檢測(cè)模塊為例給出了在主程序中調(diào)用模塊的具體流程。
2.4 電流采樣及零漂處理模塊
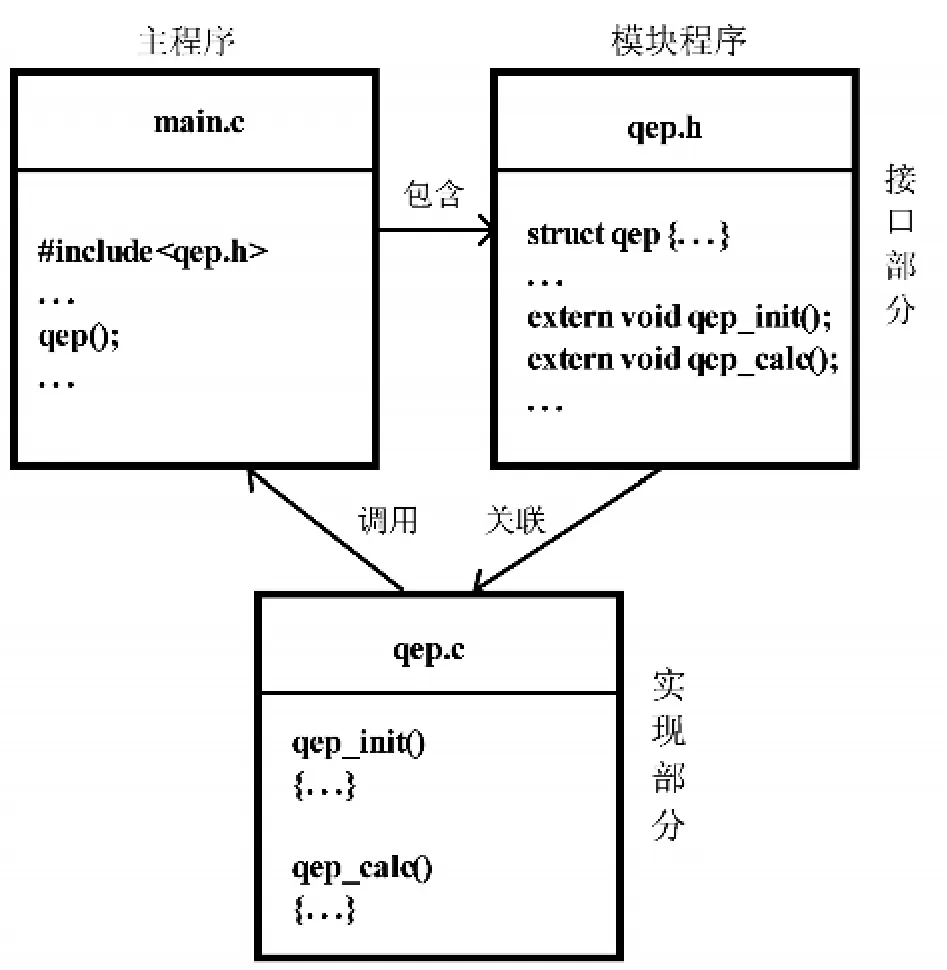
圖4 模塊調(diào)用流程圖
A、B相電流經(jīng)過(guò)霍爾傳感器后,通過(guò)采樣電阻和調(diào)理電路以電壓的形式輸入到DSP的12位A/D模塊,轉(zhuǎn)換得到的數(shù)字量存放在結(jié)果寄存器的高12位,在沒(méi)有對(duì)數(shù)字量進(jìn)行移位處理時(shí),0~3V的電壓近似對(duì)應(yīng)無(wú)符號(hào)的數(shù)字量0~65535,同時(shí)必須減去1.5V的偏移量,使數(shù)字量為有符號(hào)數(shù),最后乘以定標(biāo)系數(shù) Kcur即可得到電流真實(shí)值對(duì)應(yīng)的定標(biāo)值。定標(biāo)系數(shù) Kcur由下式給出:
式中 Imax為可采樣的最大電流值,Ib為電流的標(biāo)幺基準(zhǔn)值,定標(biāo)系數(shù)以Q15格式表示。
程序中在DSP上電,主程序運(yùn)行之后,先不給定轉(zhuǎn)速指令,對(duì)電流采用多次采樣求平均的方法,得到電流的偏移量。在給定轉(zhuǎn)速后,將偏移量減去,可以使得電流基本不受零漂的影響。
2.5 速度采樣模塊
本系統(tǒng)采用M法測(cè)速原理來(lái)檢測(cè)速度的大小,即在相鄰轉(zhuǎn)速環(huán)采樣周期內(nèi)通過(guò)對(duì)定時(shí)器計(jì)數(shù)值的處理來(lái)確定電動(dòng)機(jī)轉(zhuǎn)速的大小,設(shè)采樣時(shí)間為 T(單位為秒),光電碼盤的線數(shù)為 Pn,采樣時(shí)間內(nèi)得到的脈沖數(shù)為 m,則實(shí)際的機(jī)械轉(zhuǎn)速 n(單位為rpm)為:
令3000rpm作為轉(zhuǎn)速標(biāo)幺的基準(zhǔn)值,則由脈沖數(shù)到實(shí)際轉(zhuǎn)速標(biāo)幺值的轉(zhuǎn)換系數(shù) Kspeed用Q24格式表示為:

對(duì)應(yīng)的電氣速度為機(jī)械速度乘以極對(duì)數(shù)。并且可以通過(guò)定時(shí)器增減計(jì)數(shù)方式來(lái)判斷電動(dòng)機(jī)的正反轉(zhuǎn)。
2.6 電流模型
在間接磁場(chǎng)定向矢量控制系統(tǒng)中電流模型用來(lái)確定轉(zhuǎn)子磁鏈位置。電流模型以勵(lì)磁電流分量 id和轉(zhuǎn)矩電流分量 iq為輸入,再加上轉(zhuǎn)子電氣角速度,就可得出轉(zhuǎn)子磁鏈位置。
在暫態(tài)下定子d軸電流分量可寫成如下形式:

式中 rr為轉(zhuǎn)子電阻,Lr為轉(zhuǎn)子的自感,Lm為定子與轉(zhuǎn)子之間的互感,!r為轉(zhuǎn)子磁鏈,按照轉(zhuǎn)子磁場(chǎng)定向時(shí)轉(zhuǎn)子磁鏈在d軸上的分量即等于轉(zhuǎn)子磁鏈。

在標(biāo)幺模型中轉(zhuǎn)子磁鏈速度表示為:

假定iq(k+1)=iq(k),式(2)和式(3)可離散化為:

根據(jù)式可計(jì)算出轉(zhuǎn)子磁鏈速度,對(duì)磁鏈速度積分就可計(jì)算出轉(zhuǎn)子磁鏈位置,根據(jù)式(5)可以得到:

2.7 串行通信模塊
系統(tǒng)中利用DSP與RS-232串行口進(jìn)行DSP和PC機(jī)間的異步通信,主要實(shí)現(xiàn)PC機(jī)對(duì)DSP運(yùn)行狀態(tài)的監(jiān)控。DSP通信模塊的波特率設(shè)置為9600bps,8位數(shù)據(jù)位,無(wú)奇偶校驗(yàn),設(shè)置接收和發(fā)送中斷[6]。
PC機(jī)監(jiān)控軟件使用VB編寫,通信的方式為:首先PC機(jī)發(fā)送一個(gè)標(biāo)志字符給DSP,DSP在中斷中接收該字符,判斷是否為預(yù)先設(shè)置的標(biāo)志字符,若不是則不進(jìn)行任何操作,等待下一次的數(shù)據(jù)接收;若是則接收標(biāo)志字符之后發(fā)送的數(shù)據(jù),按照標(biāo)志字符的含義對(duì)這些數(shù)據(jù)進(jìn)行相應(yīng)的處理,然后開啟發(fā)送中斷,PC機(jī)接收到數(shù)據(jù)后將需要的信息顯示出來(lái)。
3 試驗(yàn)結(jié)果
系統(tǒng)實(shí)驗(yàn)所用的異步電動(dòng)機(jī)主要參數(shù)如下:極對(duì)數(shù)為2,額定功率 Pn=2.2kW,額定電壓為 Un=380V,額定電流為 In=5A,額定轉(zhuǎn)速為 nN=1430rpm。系統(tǒng)勵(lì)磁電流的給定為1.64A。圖5、6、7分別為空載給定轉(zhuǎn)速為900rpm時(shí),電動(dòng)機(jī)的轉(zhuǎn)速,d軸電流和q軸電流的響應(yīng)曲線。圖8、9、10分別為空載給定轉(zhuǎn)速為60rpm時(shí),電動(dòng)機(jī)的轉(zhuǎn)速,d軸電流和q軸電流的響應(yīng)曲線。系統(tǒng)的轉(zhuǎn)速、電流跟蹤性能良好,可以迅速的達(dá)到給定轉(zhuǎn)速,基本沒(méi)有超調(diào),穩(wěn)定時(shí)間短,穩(wěn)態(tài)誤差小,可以取得良好的動(dòng)靜態(tài)性能。
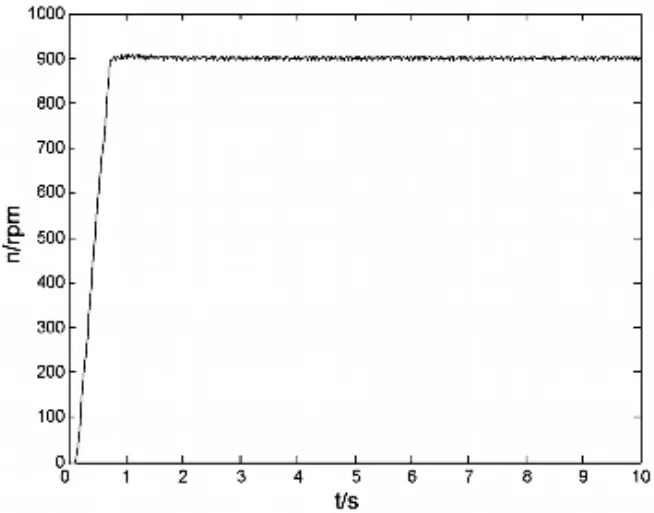
圖5 速度響應(yīng)曲線
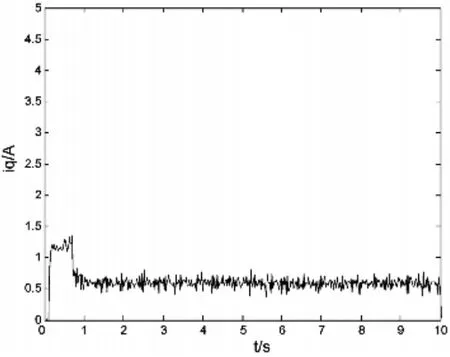
圖6 q軸電流響應(yīng)曲線
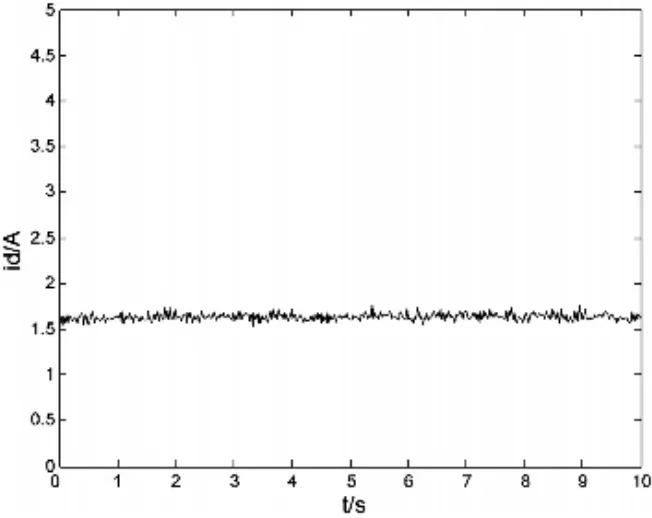
圖7 d軸電流響應(yīng)曲線
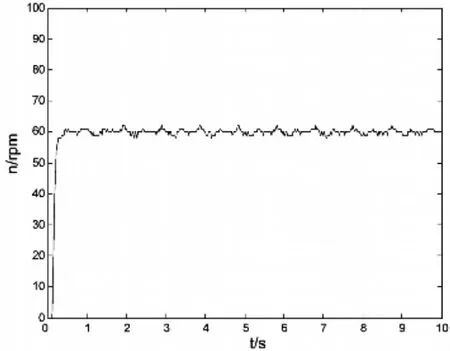
圖8 速度響應(yīng)曲線
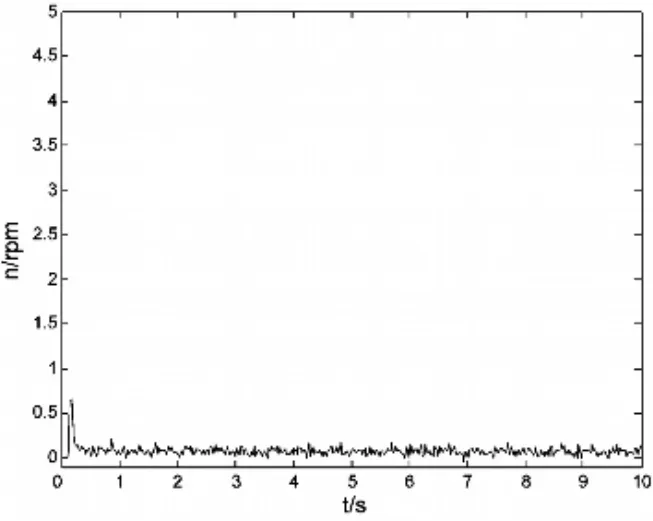
圖9 q軸電流響應(yīng)曲線
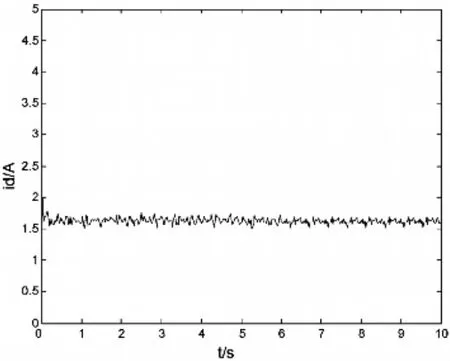
圖10 d軸電流響應(yīng)曲線
4 小結(jié)
本文TMS320F2812控制芯片為核心,開發(fā)了異步電動(dòng)機(jī)交流調(diào)速的矢量控制系統(tǒng),結(jié)合控制芯片的特點(diǎn)給出了系統(tǒng)的軟件設(shè)計(jì),詳細(xì)介紹了系統(tǒng)的軟件流程和如何用模塊化結(jié)構(gòu)實(shí)現(xiàn)各個(gè)功能部分。最終在硬件平臺(tái)上實(shí)現(xiàn)了基于TMS320F2812的矢量控制系統(tǒng),實(shí)驗(yàn)結(jié)果表明系統(tǒng)具有良好的動(dòng)靜態(tài)性能和很強(qiáng)的轉(zhuǎn)速、電流跟蹤能力,從而證明了該設(shè)計(jì)方案的正確性和可實(shí)現(xiàn)性。
[1] 陳伯時(shí),陳敏遜.交流調(diào)速系統(tǒng)[M].北京:機(jī)械工業(yè)出版社,2005
[2] 李永東.交流電機(jī)數(shù)字控制系統(tǒng)[M].北京:機(jī)械工業(yè)出版社,2002
[3] 蘇奎峰,呂強(qiáng),耿慶鋒,陳圣儉.TMS320F2812原理與開發(fā)[M].北京:電子工業(yè)出版社,2005
[4] Texas Instruments.TMS320F281x Data Sheet.2004
[5] Texas Instruments.IQmath Library.2002
[6] Texas Instruments.TMS320x281x,280x DSP Serial Communication Interface(SCI)Reference Guide.2004
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32