基于視頻序列的運(yùn)動(dòng)目標(biāo)檢測(cè)
2010-03-26 07:32:04王天苓安博文
電子設(shè)計(jì)工程 2010年12期
王天苓,安博文
(上海海事大學(xué)信息工程學(xué)院,上海200135)
隨著計(jì)算機(jī)技術(shù)的飛速發(fā)展,計(jì)算機(jī)視覺(jué)監(jiān)控應(yīng)用越來(lái)越廣泛。從國(guó)內(nèi)外范圍來(lái)看,運(yùn)動(dòng)目標(biāo)檢測(cè)一直是視覺(jué)監(jiān)控領(lǐng)域研究的熱點(diǎn)和難點(diǎn)之一,是對(duì)圖像進(jìn)一步目標(biāo)分類、跟蹤、行為分析等后續(xù)處理的關(guān)鍵,因此運(yùn)動(dòng)目標(biāo)檢測(cè)技術(shù)研究具有非常重要的意義。
近年來(lái),國(guó)內(nèi)外學(xué)者對(duì)視頻運(yùn)動(dòng)檢測(cè)進(jìn)行了許多研究,常用的有光流法、幀差分法、背景差分法等[1]。
光流場(chǎng)法無(wú)需預(yù)知場(chǎng)景的任何信息也能檢測(cè)出運(yùn)動(dòng)對(duì)象,但算法復(fù)雜度大、實(shí)用性較差;幀差分法是對(duì)相連續(xù)的圖像進(jìn)行幀差分,能夠較準(zhǔn)確地檢測(cè)到運(yùn)動(dòng)目標(biāo)輪廓,實(shí)時(shí)性較高,但是,由于相鄰幀的紋理、灰度等比較相近,通常只能得到部分運(yùn)動(dòng)信息,不能完整地實(shí)現(xiàn)目標(biāo)分割;背景差分法主要是首先進(jìn)行背景建模,然后利用當(dāng)前幀與背景幀差分來(lái)提取運(yùn)動(dòng)目標(biāo),之后每個(gè)像素的值和閾值相比較,若該像素的值大于該閾值,則認(rèn)為該點(diǎn)是前景點(diǎn),否則是背景點(diǎn)。在現(xiàn)實(shí)復(fù)雜場(chǎng)景中天氣、光線等因素對(duì)檢測(cè)效果有一定影響。另外,選擇一種適用于實(shí)際工程應(yīng)用的閾值算法,才能使運(yùn)動(dòng)目標(biāo)與背景能夠較好的分離。
作者結(jié)合在實(shí)際工作的項(xiàng)目,采用了自適應(yīng)背景提取、背景差分和閾值分割相結(jié)合的方法實(shí)現(xiàn)運(yùn)動(dòng)目標(biāo)的檢測(cè),提高了目標(biāo)分割的準(zhǔn)確度,并且能夠滿足系統(tǒng)實(shí)時(shí)性的要求。
1 預(yù)處理
1.1 灰度化
通過(guò)采集設(shè)備實(shí)時(shí)從外界環(huán)境中獲取RGB彩色圖像,其顏色種類雖多,但并非都有很大作用,因此可以把彩色圖像灰度化,其灰度值和RGB顏色對(duì)應(yīng)關(guān)系如下:

1.2 濾波、去噪
運(yùn)動(dòng)目標(biāo)檢測(cè)所涉及到的噪聲一般來(lái)說(shuō)呈現(xiàn)高斯分布,實(shí)驗(yàn)也證明選用高斯濾波能夠取得比均值濾波、中值濾波等方式更好的效果。
一維零均值高斯函數(shù)為:

其中,高斯分布參數(shù)σ決定了高斯濾波器的寬度。對(duì)圖像處理來(lái)說(shuō),常用二維零均值離散高斯函數(shù)作平滑濾波器:

對(duì)連續(xù)高斯分布進(jìn)行采樣、量化,并歸一化模板,得到以下離散模板對(duì)圖像進(jìn)行濾波:

2 運(yùn)動(dòng)目標(biāo)提取
2.1 自適應(yīng)背景提取
以固定攝像機(jī)和交通場(chǎng)景為例,自適應(yīng)背景提取方法有很多,在實(shí)際使用的主要有3種,即混合髙斯背景建模(MoG)算法、Surendra算法、自適應(yīng)中值濾波器(AMF)算法。MoG算法在小車流量時(shí)效果、魯棒性較好,但不適合復(fù)雜場(chǎng)景;Surendra算法與AMF算法能較快地適應(yīng)背景的實(shí)時(shí)變化,滿足在不同天氣狀況、光照下提取背景的要求,在城市交通監(jiān)控工程中應(yīng)用前景較廣。本文對(duì)Surendra算法進(jìn)行改進(jìn),實(shí)現(xiàn)自適應(yīng)背景提取[2-5]。
Surendra算法提取背景的思想為:通過(guò)背景差分找出運(yùn)動(dòng)區(qū)域,使運(yùn)動(dòng)區(qū)域內(nèi)的背景保持不變,而非運(yùn)動(dòng)區(qū)域的背景則用當(dāng)前幀進(jìn)行更新,經(jīng)過(guò)一定幀數(shù)的迭代即可提取出背景。由于Surendra算法沒(méi)有對(duì)得到的二值圖像進(jìn)一步處理,當(dāng)連續(xù)兩幀的前景有紋理相似的重疊部分時(shí)會(huì)形成空洞,如圖1(b)所示,本文改進(jìn)算法對(duì)二值圖像進(jìn)行形態(tài)學(xué)處理,使得空洞被填充,如圖1(c)所示,從而消除了原始Surendra算法的不足。
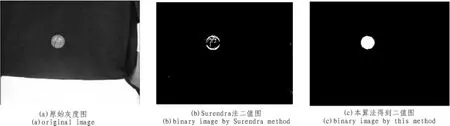
圖1 效果對(duì)比圖Fig.1 Results contrast images
具體步驟及改進(jìn)如下:
1)把第一幀圖像I0作為原始背景B0,在這里兼顧準(zhǔn)確性與實(shí)時(shí)性,采用前30幀圖像平均作為原始背景,經(jīng)驗(yàn)證效果更好。
2)令迭代參數(shù)i=1;
3)求當(dāng)前背景差分的二值圖像BWi:

其中Ii,Ii-1分別為當(dāng)前幀和上一幀圖像,abs(Ii-Ii-1)為兩幀差分的絕對(duì)值,T為閾值。
4)對(duì)二值圖像BWi進(jìn)行形態(tài)學(xué)處理,二值圖像BWi變?yōu)镈BWi。然后利用式(6)更新背景:

其中,Bi(x,y),DBWi(x,y)分別為背景圖像和二值圖像在坐標(biāo)(x,y)處的值,更新系數(shù)α值為0.1。
5)i=i+1,返回步驟3)迭代,迭代到一定幀數(shù)時(shí)的Bi即為提取出的背景。效果如圖2所示。

圖2 算法效果圖Fig.2 Results diagram of algorithm
2.2 閾值分割
常用的閾值算法有迭代法、雙峰法和大津法等。迭代法實(shí)現(xiàn)較復(fù)雜,且運(yùn)算時(shí)間長(zhǎng);雙峰法處理某些圖像的效果較好,但試驗(yàn)證明不適于車輛視頻圖像處理;大津法得到二值圖像的車輛內(nèi)部仍存有少量空洞,但其分離情況較好,所以這里選用大津法。
大津法,又叫最大類間方差法(簡(jiǎn)稱OTSU),是一種自適應(yīng)閾值分割方法,它以圖像的灰度直方圖為基礎(chǔ),依據(jù)類間距極大準(zhǔn)則來(lái)確定分割門(mén)限,對(duì)圖像進(jìn)行分割。方法如下:
設(shè)圖像有L個(gè)灰度級(jí),灰度值是i的像素?cái)?shù)為ni,則總的像素?cái)?shù)是

各灰度值出現(xiàn)的概率為

設(shè)以灰度t為門(mén)限將圖像分割成兩個(gè)區(qū)域,灰度級(jí)為1~t的像素區(qū)域A(背景類),灰度級(jí)為(t+1)~(L-1)的像素區(qū)域B(目標(biāo)類)。A、B出現(xiàn)的概率分別為

A和B兩類的灰度均值分別為


圖像總灰度均值為由此可以得到A,B兩區(qū)域的類間方差:

為了得到最優(yōu)分割閾值,把兩類的類間方差作為判決準(zhǔn)則,將式(12)代入式(13),使得σ2最大的T即為所求的最佳閾值:

背景和目標(biāo)之間的類間方差越大,說(shuō)明構(gòu)成圖像的兩部分的差別越大,因此,使類間方差最大的分割意味著錯(cuò)分概率最小。部分幀的效果如圖3所示。

圖3 部分幀與各自相應(yīng)背景差分后的二值圖像Fig.3 Current frames and their binary images difference with their background
3 后處理
如圖3所示,在二值圖像中,有時(shí)存在很多細(xì)小的噪聲,即便前景本身也可能不是完整的,甚至部分還存在空洞。因此,需要進(jìn)行數(shù)學(xué)形態(tài)學(xué)處理以得到前景的完整效果。
基本的形態(tài)學(xué)處理是腐蝕和膨脹[6]。腐蝕(Erosion)是消除目標(biāo)圖像中的無(wú)用點(diǎn)的一個(gè)過(guò)程。一般意義的腐蝕定義為:對(duì)Z中的集合A和B,使用B對(duì)A進(jìn)行腐蝕,用A?B表示:

式(14)表明,使用B對(duì)A進(jìn)行腐蝕就是所有B中包含于點(diǎn)z的集合用z平移。
膨脹(Dilation)是腐蝕運(yùn)算的對(duì)偶運(yùn)算(逆運(yùn)算),A被B膨脹定義為:

式(15)是以得到B的相對(duì)于其自身的映像B^并且由z對(duì)映像進(jìn)行位移為基礎(chǔ)的。A被B膨脹是所有位移z的集合,這樣B^和A至少有一個(gè)元素是重疊的。膨脹是將與目標(biāo)接觸的所有點(diǎn)合并到該目標(biāo)的過(guò)程。膨脹在填補(bǔ)分割后目標(biāo)中的空洞很有用。
將上述提取出來(lái)的前景(運(yùn)動(dòng)目標(biāo))通過(guò)形態(tài)學(xué)處理得出的部分結(jié)果如圖4所示。
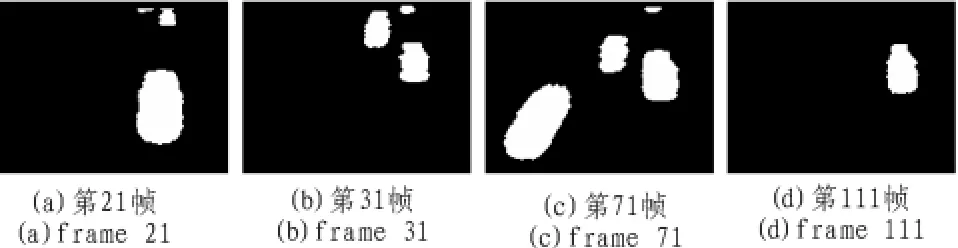
圖4 部分幀通過(guò)形態(tài)學(xué)處理后得到的完整運(yùn)動(dòng)目標(biāo)Fig.4 Complete moving target get by morphological processing
4 結(jié)論
本文提出了一種改進(jìn)的基于自適應(yīng)背景提取與自適應(yīng)閾值相結(jié)合的背景差分法來(lái)實(shí)現(xiàn)對(duì)運(yùn)動(dòng)目標(biāo)物體的檢測(cè),并結(jié)合了高斯濾波及形態(tài)學(xué)處理的方法。通過(guò)實(shí)驗(yàn)驗(yàn)證,該方法在實(shí)際工程中可不斷的更新背景,能用自適應(yīng)閾值準(zhǔn)確、有效、完整的對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行分割[7-8]。
本文算法通過(guò)編程試驗(yàn),取得了較好的運(yùn)動(dòng)目標(biāo)檢測(cè)效果,對(duì)于后期目標(biāo)分類、跟蹤、視頻分析、視頻編碼、視頻檢索以及視頻監(jiān)控等具有實(shí)際應(yīng)用價(jià)值。
[1]Robert K.Video-based traffic monitoring at day and night[C]//Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems.St.Louis,MO,USA,2009.
[2]Surendra,Gupte,Osama,et al.Detection and classification of vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2002,3(1):37-47.
[3]王正勤,劉富強(qiáng).自適應(yīng)背景提取算法的比較[J].計(jì)算機(jī)工程,2008,34(23):220-223.
WANG Zheng-qin,LIU Fu-qiang.Comparison of adaptive extract algorithm of object scene[J].Computer Engineering,2008,34(23):220-223.
[4]袁基煒,史忠科.一種快速運(yùn)動(dòng)目標(biāo)的背景提取算法[J].計(jì)算機(jī)應(yīng)用研究,2004,2l(8):128-129.
YUAN Ji-wei,SHI Zhong-ke.An algorithm of automatic background extraction of target based on fast motion[J].Application Research of Computers,2004,21(8):128-129.
[5]羅志升,王黎,高曉蓉,等.序列圖像中運(yùn)動(dòng)目標(biāo)檢測(cè)與跟蹤方法分析[J].現(xiàn)代電子技術(shù),2009,32(11):125-128.
LUO Zhi-sheng,WANG Li,GAO Xiao-rong,et al.Analysis of moving object detection and tracking in sequence image[J].Modern Electronics Technique,32(11):125-128.
[6]Gonzalez R C,Woods R E.數(shù)字圖像處理[M].北京:電子工業(yè)出版社,2007.
[7]李春生,龔曉峰.視頻序列中的運(yùn)動(dòng)目標(biāo)檢測(cè)與跟蹤[J].現(xiàn)代電子技術(shù),2009,32(23):149-151.
LI Chun-sheng,GONG Xiao-feng.Detection and tracking of moving object in vedio sequence[J].Modern Electronics Technique,2009,32(23):149-151.
[8]張建軍,黃山,張洪斌,等.基于視頻的運(yùn)動(dòng)目標(biāo)檢測(cè)與識(shí)別[J].現(xiàn)代電子技術(shù),2009,32(8):87-91.
ZHANG Jian-jun,HUANG Shan,ZHANG Hong-bin,et al.Moving object detection and recognition based on video[J].Modern Electronics Technique,2009,32(8):87-91.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12