結(jié)構(gòu)損傷參量靈敏度分析的傳感器數(shù)量位置優(yōu)化
2010-03-24 06:10:16孫曉丹歐進萍
哈爾濱工業(yè)大學學報 2010年10期
關(guān)鍵詞:模態(tài)結(jié)構(gòu)
孫曉丹,歐進萍,2
(1.哈爾濱工業(yè)大學土木工程學院,哈爾濱150090,sunxiaodan0428@yeah.net; 2.大連理工大學土木水利工程學院,遼寧大連116024)
傳感器優(yōu)化布置包括傳感器數(shù)目的優(yōu)化和位置的優(yōu)化,是結(jié)構(gòu)健康監(jiān)測中一個關(guān)鍵問題.關(guān)于傳感器位置的優(yōu)化提出了很多方法和準則,但對傳感器數(shù)目優(yōu)化的研究還非常少.傳感器優(yōu)化是一種多目標優(yōu)化,以模態(tài)識別為目標的傳感器優(yōu)化比較多,但是損傷識別是結(jié)構(gòu)狀態(tài)評估的關(guān)鍵,以損傷識別為目標的傳感器優(yōu)化亟待解決.
近年來,以結(jié)構(gòu)損傷識別為目標的傳感器優(yōu)化研究主要有:Cobb等[1]提出了一種對結(jié)構(gòu)進行損傷監(jiān)測的傳感器布置方法.Shi等[2]通過僅考慮結(jié)構(gòu)剛度變化的結(jié)構(gòu)特征靈敏度分析,以結(jié)構(gòu)各單元的損傷信息為條件,應用有效獨立法進行了傳感器優(yōu)化布置.劉暉等[3]提出基于有限測點的結(jié)構(gòu)損傷識別的柔度法,通過對結(jié)構(gòu)柔度的靈敏度分析,以結(jié)構(gòu)損傷信息為條件計算結(jié)構(gòu)的Fisher信息陣,選擇對結(jié)構(gòu)柔度變化敏感的自由度為測點.
以上方法開啟了以損傷識別為目標的傳感器位置研究,但對其數(shù)目的研究非常少.本文以判斷結(jié)構(gòu)是否存在一定水平損傷為目標,以靈敏度技術(shù)為基礎,以遺傳算法為工具,針對各種損傷指標得出所需傳感器的最小數(shù)目及其配置位置.
1 結(jié)構(gòu)損傷參量的靈敏度分析
損傷參量對結(jié)構(gòu)損傷的靈敏度是選取損傷參量的最主要依據(jù).國內(nèi)外研究者在應用靈敏度方法對結(jié)構(gòu)進行損傷識別方面已經(jīng)做了很多工作[4-5],目前針對結(jié)構(gòu)損傷識別的靈敏度計算方法主要有直接求導法、攝動法和伴隨向量法.直接求導法由于其物理意義明晰、過程簡明等特點而很早得到關(guān)注,Zhao等[4]通過直接求導靈敏度方法分析比較了頻率、位移模態(tài)和柔度法的敏感性,在此研究基礎上,本文對靈敏度推導方法進行改進:由于對剛度矩陣元素求導并沒有直觀的物理意義,所以本文將其改進為對各個單元剛度進行求導,這樣得到的靈敏度將更直接地顯示損傷隨某個單元變化的趨勢.以下將具體推導頻率、位移模態(tài)、模態(tài)曲率、柔度矩陣、應變模態(tài)和模態(tài)應變能等損傷參量對單元剛度變化的靈敏度.
1.1 頻率對單元剛度的靈敏度
一般說來,結(jié)構(gòu)的損傷將引起結(jié)構(gòu)剛度的降低而不引起質(zhì)量的改變.因此,結(jié)構(gòu)的特征靈敏度分析主要是模態(tài)參數(shù)對結(jié)構(gòu)剛度的靈敏度分析.對于任意具有n個自由度的結(jié)構(gòu)系統(tǒng),其振動特征方程可歸結(jié)為

式中:r=1,2,…,n,M和K分別為結(jié)構(gòu)質(zhì)量和剛度矩陣;ωr為結(jié)構(gòu)的第r階固有圓頻率,{φ}r為質(zhì)量歸一化的第r階振型({φ}M{φ}r=1),在本文的推導和計算中均以質(zhì)量歸一化的振型為標準.
將結(jié)構(gòu)的振動特征方程對第i個單元剛度ki求導,可得
M與ki不相關(guān),所以方程(2)兩邊同乘,由于振型的正交性成立,則可得頻率對單元剛度ki的靈敏度:

1.2 位移模態(tài)對單元剛度的靈敏度
由式(2),得
根據(jù)文獻[6],該式的解為

1.3 模態(tài)曲率對單元剛度的靈敏度
曲率是結(jié)構(gòu)中性面的變形模態(tài),與構(gòu)件的截面彎曲剛度有關(guān).如果構(gòu)件發(fā)生損傷,損傷處的局部剛度會下降,則曲率會增大,因此根據(jù)振型曲率的變化可以定位損傷.曲率不能直接測量,一般通過測量位移模態(tài)利用中心差分方法求解得到結(jié)構(gòu)的模態(tài)振型曲率,其計算表達式為

式中Δh=x(s+1)-x(s-1)為(s+1)測點和(s-1)測點的坐標之差.
對上式兩端求對ki的一階偏導數(shù),可得位移模態(tài)曲率對ki的靈敏度:

1.4 柔度矩陣對單元剛度的靈敏度
結(jié)構(gòu)的柔度矩陣F可以近似地表示為

柔度矩陣中第r列、第s行元素可以表示為

則柔度矩陣中第r列、第s行元素對第i單元剛度的靈敏度為
一般柔度法用柔度矩陣的對角線元素來識別損傷位置,所以當s=r時式(12)即為柔度參量對第i單元剛度變化的靈敏度.
1.5 應變模態(tài)對單元剛度的靈敏度
應變模態(tài)反應了結(jié)構(gòu)的固有特征,也是表征結(jié)構(gòu)是否損傷的參量之一.由材料力學關(guān)系,對于直梁截面可以得到

式中:ε為梁截面任一點的應變;z表示ε對應點處與梁中性層之間的距離.
由式(13)可以看出,應變模態(tài)與位移模態(tài)曲率只相差一個系數(shù).利用中心差分方法求解得到結(jié)構(gòu)的位移模態(tài)曲率,繼而得到應變模態(tài)為

式(14)兩端對i單元剛度求一階偏導數(shù),可得應變模態(tài)對單元剛度的靈敏度:

1.6 模態(tài)應變能對單元剛度的靈敏度
模態(tài)應變能是Kim和Stubbs在1993年提出的損傷參量,根據(jù)Stubbs,長度為l的歐拉梁的模態(tài)應變能U為

式中EI為梁段的截面彎曲剛度.對于均勻劃分單元(長度為Δl)的有限元模型,梁區(qū)段模態(tài)應變能為

對方程(17)兩端的單元剛度求偏導,可得模態(tài)應變能對單元剛度的靈敏度:

2 基于靈敏度分析的傳感器數(shù)目與位置優(yōu)化
結(jié)構(gòu)損傷對各種損傷參量的影響范圍是不同的,根據(jù)其影響范圍可以進行測點數(shù)目的優(yōu)化、并同時得到測點位置.基于損傷參量對結(jié)構(gòu)損傷的靈敏度分析并應用遺傳算法,以識別結(jié)構(gòu)損傷位置為目標的傳感器數(shù)目及其位置可按以下方法優(yōu)化確定:
1)通過靈敏度分析和設定能識別出的損傷程度,確定損傷比較線:

式中:DLi為第i單元的損傷比較線為損傷參量(damage parameters)對ki的靈敏度,αi為設定的第i單元的損傷程度.
2)通過噪聲程度確定能識別的精度,當損傷小于該水平時,損傷引起的變化將淹沒于噪聲之中.
仿真分析中,噪聲數(shù)據(jù)用輸出加入一定水平的白噪聲方式產(chǎn)生,即

式中:x(t)為輸出的加速度時程,r1為均值為0、方差為1的隨機數(shù);p代表噪聲水平(%).通過N個x'(t)通過ERA和NExT聯(lián)合算法[6]進行參數(shù)識別,可得相應的結(jié)構(gòu)振型和頻率,進而可以得到結(jié)構(gòu)的損傷參量,對N個樣本可以分別得到損傷參量(包括位移模態(tài)、柔度矩陣、模態(tài)曲率和模態(tài)應變能)的均值和方差σID.
因此,噪聲比較線確定為

式中:NLi(s,r)為第i單元的噪聲比較線,通過3σ準則確定臨界值,臨界值的數(shù)值為損傷參量方差的3倍.
3)通過遺傳算法搜索最小的傳感器數(shù)目及其配置方案.約束條件為

適應度函數(shù)為

式中:k為傳感器位置,m為傳感器數(shù)目.式(22)含義為對于第ro階模態(tài)、傳感器位置k能夠保證對于任意的i(i=1,…,n)單元的損傷比較線大于第ro階模態(tài)、k位置的噪聲線.
根據(jù)損傷參量對結(jié)構(gòu)損傷的靈敏度特點(以下算例也將清楚看到),可以把損傷參量分為兩類,第一類參量的靈敏度不隨測點變化而變化,如位移模態(tài)和柔度矩陣,這類問題可以通過遺傳算法找到測出損傷所需最小的傳感器數(shù)目及其布設位置;另一類參量的靈敏度隨測點不同而變化,如模態(tài)曲率和模態(tài)應變能,這類參量是由位移模態(tài)經(jīng)過中心差分法構(gòu)造的,測點數(shù)目減少到一定程度時會使反應的損傷位置失真,所以另一個約束條件為

式中i0為所選測點位置中離i最近的位置.該約束條件保證了從結(jié)果可以看出損傷的位置.
3 仿真算例
本文采用20單元的簡支梁有限元模型(見圖1)進行數(shù)值模擬,分別得出每個損傷參量相對于單元剛度的靈敏度.該結(jié)構(gòu)有60個自由度,本文僅關(guān)心豎向振型,因此對節(jié)點2到節(jié)點20豎向的19個自由度進行研究.其中,kn(n=1~20)為每個單元的豎向剛度.
3.1 結(jié)構(gòu)損傷參量的靈敏度分析
本文采用目前結(jié)構(gòu)分析比較成熟的商業(yè)通用軟件ANSYS建立該結(jié)構(gòu)的有限元模型,對模型進行基本的模態(tài)分析,所得靈敏度如圖2所示.

圖1 簡支梁有限元模型及其截面
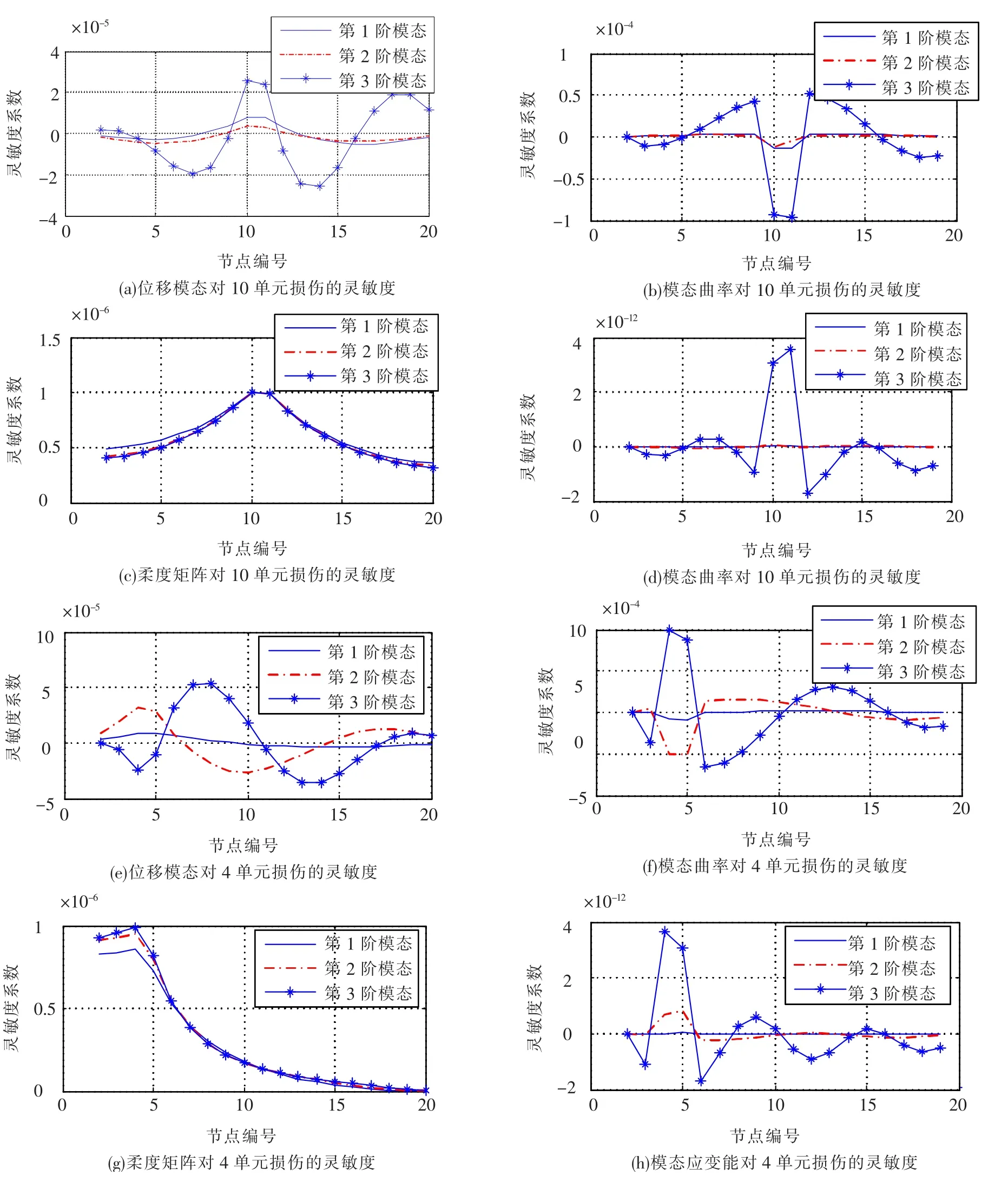
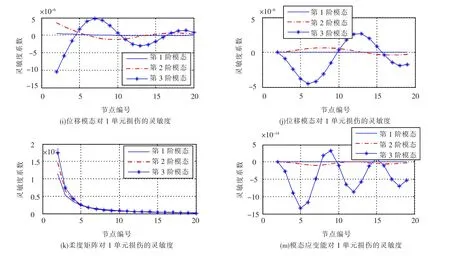
圖2 損傷參量的靈敏度
觀察位移模態(tài)、模態(tài)曲率、柔度矩陣和模態(tài)應變能等損傷參量前3階模態(tài)靈敏度的特點,可以看出每種損傷參量的影響范圍大不相同,位移模態(tài)與柔度矩陣整體性較強,而模態(tài)曲率和模態(tài)應變能局部性非常強.由于模態(tài)曲率和模態(tài)應變能采用差分法計算,邊界處的損傷很難識別,這也是這兩種方法的局限性.
根據(jù)對圖2的觀察,在單損傷的情況下,以上損傷參量均是靠近損傷位置的數(shù)值比較大.因此,在此情況下可確定損傷位置區(qū)間.位移模態(tài)的靈敏度特征具有很強的整體性,但是很難達到損傷局部定位的效果;柔度矩陣的靈敏度有如下特點:具有很強的整體性,但是損傷位置出現(xiàn)很明顯的峰值,且兩側(cè)基本為單調(diào)函數(shù),因此判別損傷位置比較容易;與位移模態(tài)和柔度矩陣不同,模態(tài)曲率和模態(tài)應變能的靈敏度隨測點不同而變化.
3.2 傳感器數(shù)目和位置優(yōu)化
每個單元設定的可識別損傷程度均為αi= 10%,噪聲水平分別設定0.5%,1%,1.5%,1.6%,1.8%,2%,3%,5%,6%,7%,8%,10%,15%,20%.應用以上方法計算得到相應于各種工況的傳感器最小數(shù)目和位置如表1所示,各種損傷參量隨噪聲水平變化的傳感器最小數(shù)目見圖3.
根據(jù)表1和圖3結(jié)果可知噪聲水平越高所需傳感器數(shù)目越多.損傷參量比較可知對于該算例位移模態(tài)和柔度矩陣所需傳感器數(shù)目較少,而相應模態(tài)曲率和模態(tài)應變能配置的傳感器數(shù)目較多.
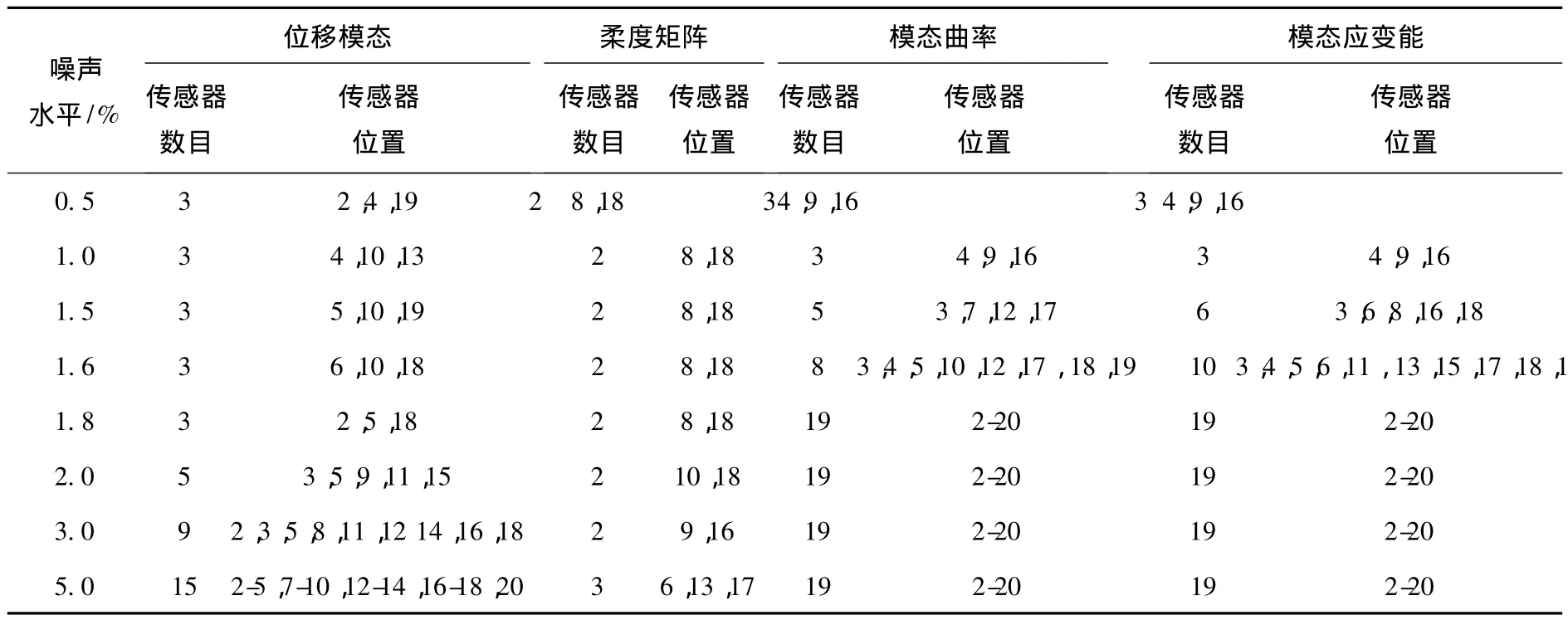
表1 傳感器最小數(shù)目及其位置
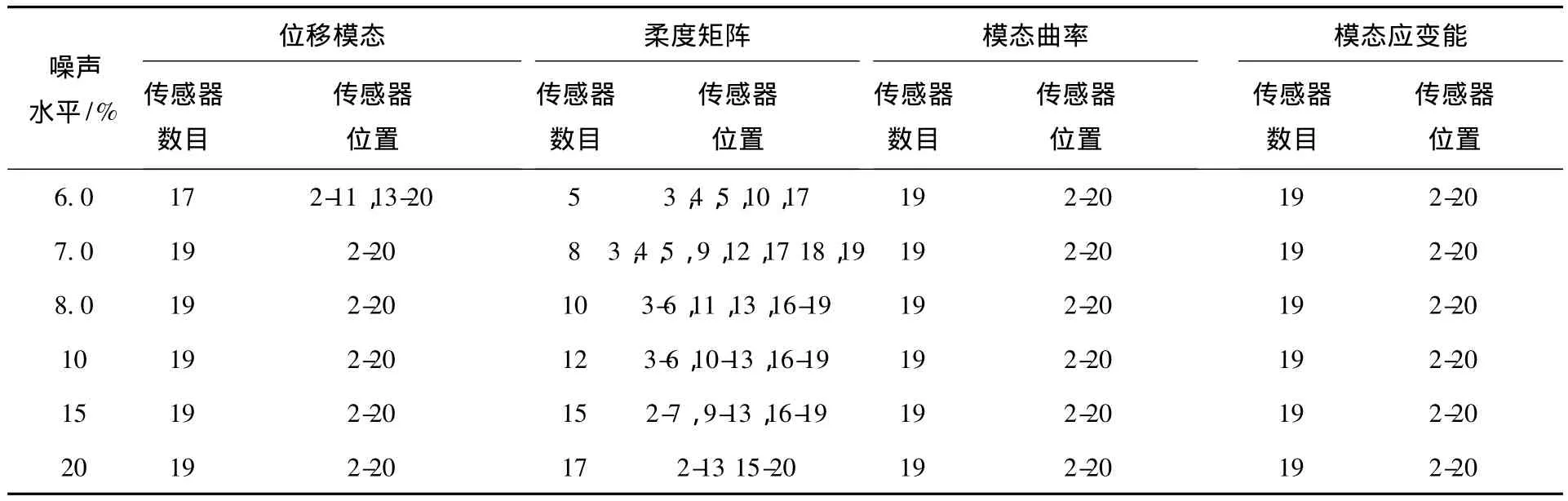
續(xù)表1
4 結(jié)論
1)該傳感器優(yōu)化方法可以確定以識別一定程度的損傷為目標傳感器的最小數(shù)目及其位置.并且對單損傷情況下結(jié)構(gòu)的損傷位置有大致的判斷,對多損傷情況時最大程度損傷的位置有預估.
2)提出的以上方法確定的傳感器配置方案與結(jié)構(gòu)單元的劃分、每個單元待識別的損傷程度、選擇的損傷參量以及環(huán)境噪聲水平有關(guān).需要識別的程度越小就需要更多的傳感器.噪聲水平越高,所需傳感器越多.此外,選擇的模態(tài)階數(shù)對優(yōu)化結(jié)果也有重要影響.
3)采用不同的損傷參量進行損傷識別,就會有不同的傳感器布置方案,在本文研究的幾種損傷指標中,對于該算例,柔度法所需傳感器數(shù)目較少,但是損傷位置比較難確定,而對于模態(tài)曲率和模態(tài)應變能所需傳感器比較多.
[1] COBB G,LIEBST B S.Sensor placement and structural damage identification from minimal sensor information[J].AIAA Journal,1997,35(2):369-374.
[2] SHI Z Y,LAW S S,Zhang L M.Optimum sensor placement for structural damage detection[J].Journal of Engineering Mechanics,2000,126(11):1173-1179.
[3] 劉暉,瞿偉廉,袁潤章.基于有限測點信息的結(jié)構(gòu)損傷識別柔度法[J].計算力學學報,2005,22 (3):379-384.
[4] ZHAO Jun,DEWOLF J T.Sensitivity study for vibrational parameters used in damage detection[J].Journal of Structure Engineering,ASCE,1999,125(4): 410-416.
[5] NELSON R B.Simplified calculation of eigenvector derivatives[J].AIAA Journal,1976,14(9):1201-1205.
[6] 侯立群.環(huán)境激勵與噪聲干擾下斜拉橋模態(tài)識別與損傷定位[D].哈爾濱:哈爾濱工業(yè)大學,2004.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
