對數(shù)零相位譜在雷達目標識別中的應用研究
2010-03-23 08:56:00冷家旭黃惠明
航天電子對抗 2010年3期
關鍵詞:特征
冷家旭,黃惠明,龍 方
(北京跟蹤與通信技術研究所,北京 100094)
1 引言
高分辨一維距離像(HRRP)是雷達接收到的目標強散射點子回波沿雷達視線方向的投影矢量和,它包含了目標沿距離向精細的幾何結(jié)構(gòu)特征,對目標分類識別十分有價值。但是H RRP對目標的姿態(tài)變化和距離向的平移變化都很敏感。為抑制平移敏感性問題,人們提出了多種平移不變特征,如幅度譜、功率譜、零相位譜等。相比于幅度譜、功率譜,文獻[2]提出的零相位譜保留了除線性相位以外的所有相位信息,且計算難度不大。
在此基礎上,結(jié)合對目標高分辨距離像產(chǎn)生原理的分析,本文提出一種對數(shù)零相位譜最小距離識別方法——提取目標HRRP的對數(shù)零相位譜特征,利用線性判別分析進行維數(shù)壓縮,并在最小歐氏距離與最小馬氏距離準則下對飛機目標進行分類識別。外場實測數(shù)據(jù)的仿真結(jié)果表明對數(shù)零相位譜特征識別性能優(yōu)于功率譜與幅度譜特征,驗證了本文方法的可行性與有效性。
2 對數(shù)零相位譜的定義
所謂零相位譜,即是將高分辨實距離像x(n)的頻譜X(m)=[X0 X 1 ejφi…XN-1 ejφN-1]的每根譜線相位φi(i=0,1,…,N-1),減去第1根相位非零譜線的相位φ1的0~N-1倍,從而使X(1)的相位置零,具體形式為[3]:

對數(shù)零相位譜是通過零相位譜取自然對數(shù)獲得的,定義為:
定義1 設XZPP(m)為一維距離像序列x(n)的零相位譜,則稱

是序列x(n)的對數(shù)零相位譜。
根據(jù)零相位譜的定義與性質(zhì),容易證明,對數(shù)零相位譜同零相位譜一樣,能夠完全去除信號中的線性相位并保留其他相位信息,具有平移不變性。通過下節(jié)的推導還可以看出,對數(shù)零相位譜能利用簡單的最小距離判決準則實現(xiàn)目標分類識別,并且具有明確的物理意義。
3 分類方法
3.1 對數(shù)零相位譜最小距離分類原理
高分辨雷達通常工作在高頻區(qū),目標可以用散射點模型表示。設當目標姿態(tài)角為θ時,雷達信號在目標面向雷達表面r(x,y,z)處引起的散射點分布函數(shù)為h,θ)[4],其中r為目標幾何中心到該處的位置矢量。
若雷達發(fā)射線性調(diào)頻信號:S(t)=rect(t/Tp)?ej2π(fct+γt2/2),則目標回波經(jīng)dechirp脈壓處理后得到的一維實距離像可表示為[5]:
式中,Tp為脈寬,γ為調(diào)頻率,R ref為解線頻調(diào)的參考距離,R=|R0+r|為散射點到雷達距離,R0為雷達到目標幾何中心的距離矢量。注意到遠場條件R0?r,近似有R=R0+r cosφ,φ=∠(R,r)。
對Sr(t)進行時域采樣(采樣頻率為fs),并將式(3)兩邊進行DFT,化簡可得:
式中,R0=R0-R ref(即:R ref的影響可以通過平移坐標消除),H(m,θ)為目標散射函數(shù)h(r,θ)的空域離散Fourier變換,積分面s是處在雷達波束內(nèi)雷達可見的目標曲面。
式(3)表明,目標實距離像的頻譜可分為3部分,第1項P(m)僅與雷達發(fā)射信號有關,第2項exp[j(4πf,γm/Nc)R0]是目標相對雷達平動引起的線性相位項,而第3項H(m,θ)則包含了目標的特性信息,是HRRP目標識別的根本依據(jù)。
將Sr(m;θ)轉(zhuǎn)換到對數(shù)零相位譜域,可以消除目標平動引起的線性相位,則有:

假設雷達觀察到目標h1(r,θ1)和h2(r,θ2)的回波分別為s1(t;θ1)和s2(t;θ2),在對數(shù)零相位譜域相減,可得:

式(6)表明,不同目標雷達回波的對數(shù)零相位譜的距離測度(如歐氏距離、馬氏距離等),可以作為度量和判斷不同目標相似程度的依據(jù)。因此,對數(shù)零相位譜最小距離分類方法適用于雷達HRRP飛機目標識別。
3.2 對數(shù)零相位譜最小距離判決準則
根據(jù)上述分析可知,對數(shù)零相位譜最小距離判決準則可表述如下:
假設有C類不同目標,其姿態(tài)角為θij,i∈NC,NC={1,2,…,C},j∈Di,Di={1,2,…,Ni},Ni為第i類目標劃分的姿態(tài)角域個數(shù)。用它們的平均對數(shù)零相位譜log zpp (si(t;θij))作為比較模板,對于待識別目標的距離像s(t;θ),如果存在某個確定的k∈NC,l∈Dk,對?i∈NC,j∈D i有:則認為目標是姿態(tài)角為θkl時的第k類目標。
在本文中,取d(x1,x2)分別為樣本點x1、x2的歐氏距離與馬氏距離,即:

4 算法仿真
4.1 外場實測實驗數(shù)據(jù)介紹
本文采用雷達實測飛機數(shù)據(jù)進行仿真識別。該數(shù)據(jù)是取自國內(nèi)某研究所逆合成孔徑C波段實驗雷達的ISAR測量飛機數(shù)據(jù),其脈沖重復頻率為400Hz,信號帶寬為400MH z;采用Dechirp接收,轉(zhuǎn)換后信號的采樣頻率為10MH z。試驗飛機有三種,“雅克-42”為中大型噴氣飛機,“獎狀”為小型噴氣飛機,“安-26”為中小型螺旋槳飛機。
根據(jù)數(shù)據(jù)中航跡信息可以預先估計出飛機姿態(tài)角,本文選用“雅克-42”的第1段,“獎狀”的第2、4段以及“安-26”第1、3段作為訓練樣本,以10°為間隔劃分姿態(tài)角域,適當抽取后生成18個訓練樣本庫,每個樣本庫包含500個距離像。測試樣本來自其它段數(shù)據(jù),每類飛機取10000個測試距離像。
4.2 仿真流程與結(jié)果比較
因為距離像的能量集中在信號的低頻部分,不同目標距離像間的差異信息也主要集中在低頻分量上。因此,本文首先將提取的對數(shù)零相位譜進行低頻截短,再利用線性判決分析(LDA)[6]以及最小歐氏、馬氏距離分類器進行目標識別。作為對比,試驗還截取了相同頻段的功率譜與幅度譜特征,具體算法仿真流程如圖1所示。
表1、表2為不同截取維數(shù)時對數(shù)零相位譜、功率譜與頻譜幅度三種特征的識別性能比較,其中表1使用最小歐氏距離分類器,表2使用最小馬氏距離分類器。根據(jù)頻譜幅度的對稱性,用于比較的低頻分量最大截取維數(shù)為128。
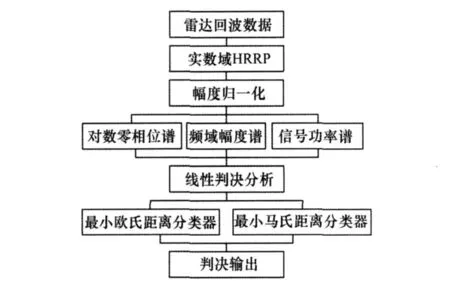
圖1 仿真算法流程

表1 不同截取維數(shù)時識別性能的比較(最小歐氏距離分類器)
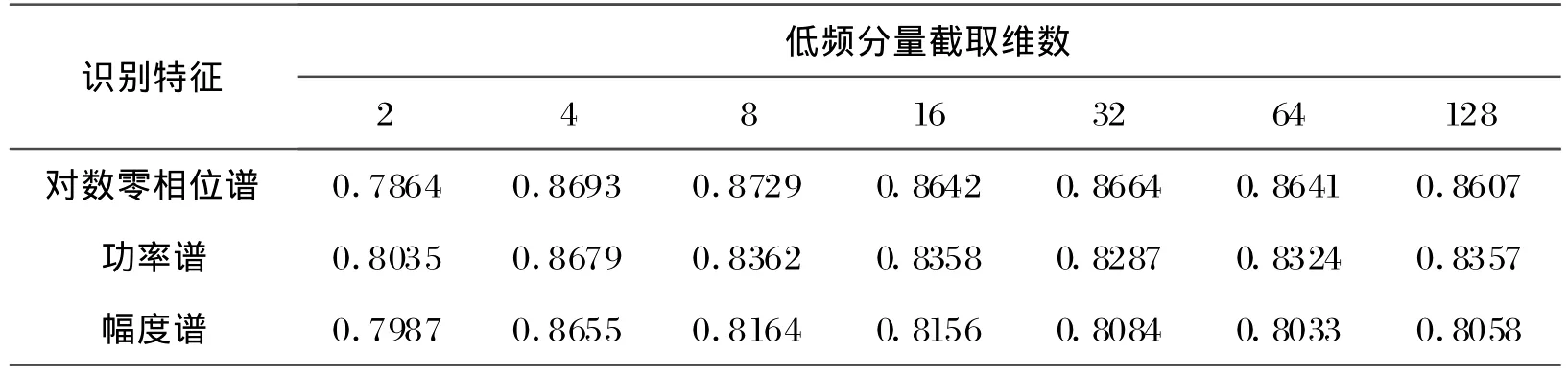
表2 不同截取維數(shù)時識別性能的比較(最小馬氏距離分類器)
從表1、表2中可以看出,截取維數(shù)高于2維時,對數(shù)零相位譜的識別率均高于同頻段的另外兩種特征。這是由于頻譜相位中包含了更多的目標形狀信息,功率譜與幅度譜丟失了全部相位信息,而對數(shù)零相位譜則保留了除線性相位以外的所有相位信息,因此其識別性能優(yōu)于另外兩種特征。另外,每種特征的識別率均隨著維數(shù)增加先上升后略有下降,這是因為距離像的鑒別力主要集中在低頻分量上,高頻分量則包含了更多的幅度突變和噪聲雜波等干擾,低頻分量的增加能夠提高識別率,而有害高頻信息的引入將導致識別率下降。但FDA能在壓縮維數(shù)的同時聚集同類、分散異類,在一定程度上減弱了高頻分量的干擾,使識別率下降幅度不大。
比較表1、表2的數(shù)據(jù),不難發(fā)現(xiàn),相同條件下最小馬氏距離分類器的識別性能優(yōu)于最小歐氏距離分類器。這是由于馬氏距離在計算過程中考慮了類內(nèi)樣本矢量中每個特征點的方差,在計算距離時依據(jù)方差大小對各特征點分配不同的權(quán)值,達到減弱大方差特征點影響的目的,因而其識別率高于歐氏距離分類器。但也正是因為需要計算類內(nèi)樣本的協(xié)方差矩陣,馬氏距離的計算量較大,如表3所示,其平均時耗均高于相同條件下的歐氏距離分類器,識別性能的提升是以犧牲運算量為代價。
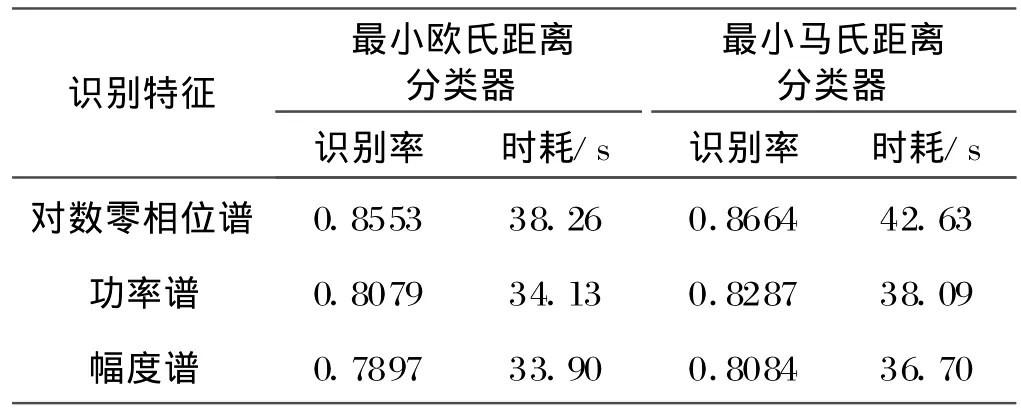
表3 識別性能與時耗比較,維數(shù)為32
綜合上述三種特征的識別性能與低頻分量截取維數(shù)的關系以及識別過程的平均時耗,對數(shù)零相位譜特征在平均識別率、運算量等方面均表現(xiàn)了出色的性能,不失為HRRP目標識別中的一種合理選擇。而基于歐氏距離與基于馬氏距離的判決準則各有利弊,在工程應用中可根據(jù)實際情況加以選擇。
5 結(jié)束語
高分辨距離像的頻譜相位包含了大部分目標信息,對數(shù)零相位譜特征不僅能夠保留這些信息,而且具有平移不變性。本文提出對數(shù)零相位譜最小距離目標識別方法,將對數(shù)零相位譜特征成功地應用于雷達目標識別領域中。在對外場實測數(shù)據(jù)的仿真試驗中,比較了最小歐氏距離與最小馬氏距離兩種判決準則下對數(shù)零相位譜特征的識別性能,同時將其與功率譜、幅度譜進行橫向?qū)Ρ?驗證了該方法的可行性與有效性。■
1 Xing M,Bao Z,Pei B.The properties of high-resolution range profiles[J].Optical Engineering,2002,41(2):493-504.
2 曹向海,劉宏偉,吳順君.基于零相位譜的雷達目標識別[J].現(xiàn)代雷達,2007,29(9):48-55.
3 Pajd la T,H lavac V.Zero phase representation of panoramic Images for image based localization[C].Proc.8th Int.Con f on Computer-analysis of images and patterns,Berlin,Springer,1999:550-557.
4 裴炳南.高分辨雷達自動目標識別方法研究[D].西安:西安電子科技大學,2002.
5 保錚,邢孟道,王彤.雷達成像技術[M].北京:電子工業(yè)出版社,2006.
6 劉本永.子空間法雷達目標一維像識別研究[J].電子與信息學報,2004,26(7):1137-1143.
猜你喜歡
數(shù)學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數(shù)理化(高中版.高考數(shù)學)(2022年3期)2022-04-26 14:04:16
數(shù)學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38