無人飛行器在線航跡規劃技術研究
2010-03-23 08:56:12胡中華
航天電子對抗 2010年4期
關鍵詞:規劃
胡中華,趙 敏
(南京航空航天大學自動化學院,江蘇南京 210016)
0 引言
域內完成任務,同時保存自己,達到最佳的作戰效果,此即無人飛行器航跡規劃[1]。
隨著高新技術的發展,現代戰爭已經呈現出明顯的無人化趨勢。在未來信息化戰爭中,無人飛行器將扮演越來越重要的角色。因此,在實時環境中,不僅要求在有限的、盡可能短的時間內為無人飛行器迅速地規劃出下一段可飛航跡,而且要求在周圍環境發生變化時,無人飛行器能夠“感知”到這種變化并迅速根據新的信息重新對路徑進行尋優,找出在滿足無人飛行器系統機動性能約束條件下,無人飛行器生存概率最大且經濟效益最大的參考航跡,使得執行戰術任務的無人飛行器能突防戰場的威脅環境,并在敵方防空區
1 在線航跡規劃問題的描述
根據不同的任務環境,無人機航跡規劃可分為靜態規劃和動態規劃。
靜態規劃是根據先驗數據人為給定任務環境,然后把預先規劃好的最優路徑裝載在無人機上,無人機自動駕駛沿預定航線飛行。關于靜態規劃(離線規劃)問題,許多學者作了大量的工作,智能算法方面主要有:A*算法、遺傳算法、蟻群算法等等;航跡幾何建模方面主要有:通過構建威脅場的Voronoi圖,得到回避威脅的航跡段,再用Dijstra法求解最優路徑。這種方法的缺點是預先給定的戰場環境太過簡化,限制了實際可行路線;在無人機規避障礙物研究中,常用柵格法和人工勢場法,柵格法速度隨著規劃空間的復雜度迅速變慢,人工勢場法也存在避障缺點[2]。
動態規劃(在線規劃)即根據環境變化,無人機實時做出反應,重新規劃路徑[3]。無人機動態航跡規劃需要考慮無人機機動性能約束及威脅場約束。在未知環境下,威脅場具有突發特性,主要包括隨機風場、地理障礙、雷達、導彈及高炮等威脅源。也就是說,應考慮無人機在飛行過程中能根據位置變化獲取傳感信息、進行信息融合,并結合預定任務進行動態航跡規劃,將規劃的結果以指令方式發送給機載自動駕駛儀,從而控制舵機實現按規劃的航跡飛行。
2 動力學約束
動力學約束主要包括以下幾個方面。
1)最大爬升角 在三維航路規劃時必須考慮無人機的最大爬升角。影響最大爬升角的因素主要包括無人機的發動機性能、翼型及翼面、飛行高度及氣候狀況,通常通過控制水平尾翼及增加推力實現爬升。爬升角不能過大,太大則失去爬升率,有可能導致無人機失速,因此存在最大爬升角,一般飛行狀態下,爬升角近似等于俯仰角,如圖1所示。因此,爬升角可表示為:

或者

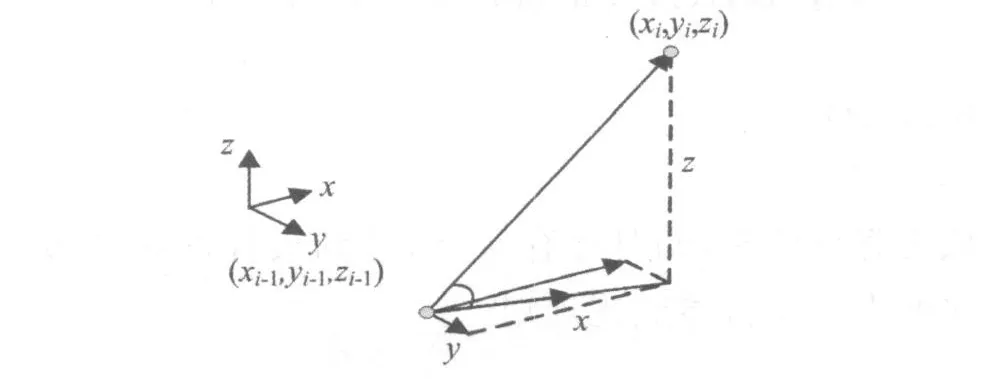
圖1 爬升角幾何模型
式中,γ表示爬升角,(xi-1,yi-1,zi-1)表示飛機航向尾部點坐標,(xi,yi,zi)表示飛機航向機頭坐標。
2)最大航程 無人機在整個飛行過程中的飛行路程,受到飛機燃油和飛行時間配給的限制。設最大航跡長度為L,則每一個航段距離li應滿足:
3)無人機的最小飛行高度 設每一段航路飛行高度為Hi,則H i應滿足:H i≥H min,(i=1,…,n)。不同于二維航路規劃僅考慮水平方向航路規劃,三維航路規劃必須考慮地形威脅,因此要考慮高度影響。飛行器被敵方探測器發現或被地面防御系統摧毀的概率隨高度的增加而增加。而飛得過低往往會使得與地面相撞的墜毀概率增加[4]。因此,要在減少被地面防御系統摧毀的概率和減少墜毀概率之間進行折中。搜索過程中每一個待擴展的節點,只有當它的高度大于或等于給定的最小值H min時,才把它作為可能的航跡點。H m in表示離地面的豎直距離,而非海拔高度。該項指標驅使航跡規劃算法去獲得低高度的飛行航跡,提高地面掩護效果。
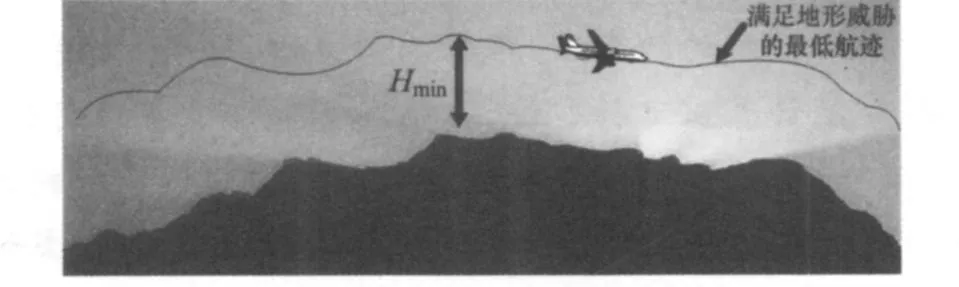
圖2 最小威脅曲面示意圖
因此,考慮地形威脅的作用,同時結合飛行器的撞地概率,當飛行器以高度H m in離地飛行時,認為其地形威脅最小。因此,在原地形曲面上考慮威脅信息的抬高作用,由所有距離地表高度為Hmin的點構成威脅曲面。飛行在該曲面上的無人飛行器受地形威脅最小,由此得到最小威脅曲面如圖2所示。假設地形可以用函數z=f(x,y)表示,則最小威脅曲面為:

4)最小步長 為無人飛行器在改變飛行姿態前必須直飛的最短距離,即以最低(巡航)速度飛行1s的距離,以RO-9無人機為例,巡航速度130km/h,也就是36m/s,可以簡化為40m/s,對于設定范圍是400km的作戰空間,則可以劃分為100格。設最小步長L min,則無人機在改變飛行姿態時必須滿足:

圖3中,設a為當前航路點,b1、b2、b3、b4、b5為待選的5個航路點,分別對應的步長為L1、L2、L3、L4、L5,其中,僅L1和L4小于最小步長L min,因此,從滿足步長程度來選擇L2、L3、L5滿足最小步長約束,可以作為下一步長的待選節點。
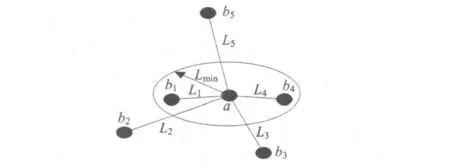
圖3 最小步長選擇圖
5)無人機的最大轉彎角度φ 設航跡點(xi,yi)或(xi,yi,zi),設每一航段向量q=(x1-xi-1,y1-yi-1,z1-zi-1),則最大轉彎角約束可寫:

3 威脅場約束
無人機在飛行過程中要考慮威脅源(包括地理障礙、惡劣氣候、敵方武器陣地等)的空間位置、威脅源半徑、威脅源類型等限制。假設敵方雷達位置坐標(xi,yi),掃描半徑ri,i=1,…,m,則區域((a-xi)2+(b-yi)1/2)≤ri為不可飛區,必須繞過這些區域,如圖4陰影部分所示。
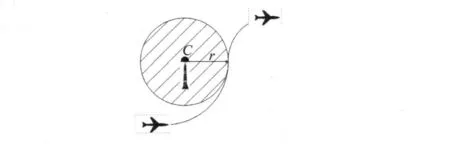
圖4 無人機繞過威脅區示意圖
具體規劃過程中,主要包括:
1)路線搜索:以出發點及可行路線與包絡的交點作為搜索起點,攻擊路線進入點作為終止點,進行路線的搜索,搜索方法采用深度優先法。
2)威脅場分區:將整個規劃區域內的威脅場按相互連接關系進行分組。
3)可行路線識別及網絡建立:識別出不同威脅場組間的可行路線,并將所有的可行路線按可能的連接關系構造成路線網絡。
4)威脅場包絡識別及綜合網絡建立:識別出規劃區域中包含所有威脅場的外邊界,并確定可行路線網絡、進攻路線及包絡的連接關系。
4 在線航跡規劃研究現狀及算法
近年來,無人機的應用推動了航跡規劃的研究。目前美國研制的航跡規劃系統已經發展到第三代,正朝著提高效能和降低系統成本等方面繼續發展。最有代表性和最著名的航跡規劃系統是美國空軍的NUH-60A STAR直升機所裝備的航跡規劃系統。英國已研制成功Pathfinder 2000航跡規劃系統。法國目前裝備有M IPSY,CINNA和CIRCE2000等系列航跡規劃系統。現代無人飛行器航跡規劃問題不僅包括航跡預規劃,而且需要帶有一定的實時性,即在線航跡規劃或動態實時航跡規劃。
許多學者在離線航跡規劃方面作了大量的工作,采用了許多智能搜索算法,如A*算法、遺傳算法、蟻群算法等。盡管大量文獻已經指出設計開發無人飛行器在線實時航跡規劃算法的重要價值,但見之文獻的相對于離線航跡規劃卻少很多,主要研究如下[5-7]:
國內,空軍工程大學孫彪采用連續型粒子群優化(PSO)算法進行無人機參考航跡的實時規劃,以最大轉彎半徑、步進、最短距離和回避威脅作為適應度函數的評價指標,得到代表最優航跡的離散點。仿真結果表明該方法收斂時間短,占用內存少,可以滿足在線實時航跡規劃的要求。丁曉東提出了一種基于RCS的無人機航跡實時規劃方法,并采用多階段分析博弈評估算法對航跡進行優化。仿真結果表明,該方法能夠比較好地解決無人機的航跡規劃問題。李士波提出了一種基于實時A*搜索的無人機實時航跡規劃算法,該算法將飛行器運動與航跡搜索相結合,在飛行器飛行過程中實時規劃出下一段航跡;在搜索過程中,使用了多步尋優搜索的方法,相比單步搜索生成的航跡更加優化;使用最小轉彎半徑對生成的折線進行連接,使路徑平滑可飛;針對算法局限性,給出一種改進局部最優點的策略。該算法能夠較好地滿足規劃要求。北京航空航天大學曾佳提出了一種滿足時序約束的無人機在線協同航跡規劃方法。首先采用按時間推進的協同規劃機制,解決了在線協同規劃中信息交互存在時間間隔的問題;其次通過設計協同函數,采用自主分布計算協同變量的方法解決其時序問題。仿真選取同時到達和按等時間間隔到達兩類典型時序問題,結果表明該方法可以快速生成符合協同時序要求的協同航跡。解放軍炮兵學院倪敏在對傳統算法進行改進的基礎上,提出運用支持向量機的思想,建立航跡回歸模型。其建模速度快,計算時間少,可擴充性強,能及時為無人機在未知環境中提供實時航線圖。西北工業大學田雪濤給出了基于混合整數線性規劃技術在模型預測控制框架下進行無人機實時航跡規劃的方法。該方法通過將威脅區、速度、加速度以及威脅規避等約束條件轉化為能夠直接應用在M ILP中的形式,并結合模型預測控制方法來進行規劃以滿足實時性要求。肖秦琨針對威脅可變及威脅體不盡相同的無人機路徑規劃問題提出了一種局部路徑重規劃的算法。算法中,威脅體威脅等級隨無人戰斗機飛行不斷變化,無人戰斗機通過多傳感器數據融合知識構建動態貝葉斯網絡圖,獲取環境信息,應用V iterbi解碼算法獲得實時威脅等級,進行局部改進型Voronoi圖的重構,以完成局部路徑重規劃,提高了無人戰斗機在實戰環境下生存概率。南京航空航天大學安柏義利用Dynapath(動態路徑)算法進行參考航線優化,根據局部地形、地貌、障礙、威脅等信息以及飛機機動性能的限制,實時計算出飛行航跡,仿真結果表明該方法可以比較理想地進行航跡點的處理,得到較好的航跡。
國外,K im提出在敵方環境下運用有限的信息進行全自主無人機的實時航跡規劃方法,該方法包括兩個算法,第一個算法僅考慮非常有限的信息,僅包括無人機當前所處位置的可能存在的威脅;而第二個算法則需利用更多的信息,包括無人機所感知的威脅強度及位置等。兩個算法產生一系列安全的路徑節點,其風險值低于規定的風險閾值。Kam rani采用序列蒙特卡羅仿真對執行監測任務的無人機進行路徑規劃。但要求提供足夠多的關于目標和環境的先驗信息,才可以通過序列蒙特卡羅仿真對目標的未來狀態進行評估。Jennings考慮存在隨機風場影響下無人機航跡,受風場影響無人機偏離了預規劃航跡,通過動態規劃法在線插補新的路徑節點,由于動態規劃算法的內在啟發性限制了可選航跡數量,因此,算法在非常快的計算時間內就提供近似最優的航跡。Yang首先使用快速擴展隨機樹生成防碰路徑,該路徑由多條直線段連接而成,因此無人機無法按此飛行,然后采用三次Bezier螺旋曲線的G2連續路徑算法,將直線用曲線替代,仿真結果表明,該算法較Dubins路徑及C1連續三次Bezier螺旋曲線具有更好的效果。Bernhard Weiβ針對未知環境提出一種無人機動態規劃算法,無人機飛行航跡由一組可修剪軌跡組成,首先通過當代迭代算法確定了下一代的最佳修剪軌跡,以便降低代價函數值,并通過改變權值,使總的航跡代價最小,最后通過Dijkstra算法獲得全局最佳路徑。Ducard在未知環境下,降低無人機性能過程中,對無人飛行器航跡實時重規劃,從而達到規避障礙等目的。嚴格地說,該研究提出的是無人飛行器動態導航算法。
綜上所述,可用于無人飛行器實時航跡的算法目前主要有:實時A*算法、實時Dynapath算法、連續型粒子群優化、支持向量機(動態路徑)、三次Bezier螺旋曲線、Voronoi圖等。這些算法除Voronoi圖外,其余均基于柵格法,但都存在隨著周遭威脅環境復雜度的增加、計算時間也急劇增加的缺點。更重要的是,它們都是以實現代價最小為目標的路徑規劃,很少考慮到無人飛行器因動力學條件約束生成航跡的不可飛性。以上算法對于這種受無人飛行器自身狀態約束的航跡優化問題,處理起來并不容易。通常的解決方法是通過航跡平滑、航跡跟蹤技術,對算法生成的航跡進行處理以得到實際可飛航跡,但這卻會損失實時性。
5 結束語
無人飛行器在線航跡規劃的時效性要求很高,目前還存在以下問題:a)過于簡化無人飛行器約束。對無人飛行器動力學約束的考慮過于簡單,造成由此規劃的航跡往往實際不可飛。b)時效性要求達不到。雖然近年來許多文獻提出航跡規劃的動態優化方法,但未考慮實戰環境下威脅性不斷變化的情況。在實時航跡規劃中,偵察環境數據常常會實時發生改變,動態規劃算法在每次參數發生改變時,必須重新代入模型進行運算,計算時間過長,而達不到及時規避威脅的要求。c)算法模型的失效。無人飛行器航跡規劃需要的信息是高維和海量的,而動態規劃具有“維數爆炸”特性,這使得在進行算法設計時,簡化因素較多、誤差較大,建立的模型并不能反映真實的環境,得出的航跡規劃不能滿足任務要求。
未來在無人飛行器在線航跡規劃的發展方向及研究重點主要有:a)開發高效的在線規劃算法。要求算法尋優能力強,收斂速度快。需要結合不同算法的優勢,提出混合算法,以提高算法的時效性。b)多機在線協同航跡規劃。為了提高無人飛行器的作戰能力,將具有不同能力的無人飛行器組成網絡化無人飛行器群顯得非常重要。因此,需要研究無人飛行器群在線協同航跡規劃,以實現任務重分配、網絡重組、威脅規避及在線自主多機協同作戰的功能。■
[1] 高暉,陳欣,夏云程.無人機航路規劃研究[J].南京航空航天大學學報,2001,33(2):135-138.
[2] 高曉光,楊有龍.基于不同威脅體的無人作戰飛機初始路徑規劃[J].航空學報,2003,24(5):435-438.
[3] A l-Hasan S,Vachtsevanos G.Intelligent route planning for fast autonomous vehicles operating in a large natural terrain[J].Robotics and Autonomous Systems,2002,40:1-24.
[4] 葉媛媛,閔春平,沈林成,等.基于VORONOI圖的無人機空域任務規劃方法[J].系統仿真學報,2005,17(6).
[5] 丁曉東,劉毅,李為民.基于動態RCS的無人機航跡實時規劃方法研究[J].系統工程與電子技術,2008,30(5):868-871.
[6] 曾佳,申功璋,楊凌宇.無人機在線協同航跡規劃時序問題[J].南京航空航天大學學報,2009,41(3):334-338.
[7] 田雪濤,席慶彪.基于混合整數線性規劃無人機實時航跡規劃[J].計算機仿真,2009,26(5):72-75.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
