JTIDS仿真訓練系統組網模式研究
2010-03-14 09:05:22馮永浩
電視技術 2010年1期
陶 晶,馮永浩
(空軍工程大學 電訊工程學院,陜西 西安 710077)
1 引言
以JTIDS為終端的Link16網絡是美軍的主要戰術數據鏈,具有通信、導航、識別等多種功能。同時具有組網靈活,抗干擾能力強,保密性好的特點,使得JTIDS系統具有廣泛的應用價值。JITDS 1類終端多為大型設備,是Link16,Link11組網的核心端機,設備功能復雜,平時主要擔任戰術值班任務。2類終端構成了Link16網絡的主要端機部分,與1類端機組網可以形成較為完整的Link16網絡功能[1-2]。但是實際設備數量較少、精密度較高、易損壞,而且組網條件較為復雜。
為了克服使用實際裝備進行訓練的難度,必須設計出能夠實現JTIDS系統功能,同時結構相對簡單,成本相對低廉的JTIDS仿真訓練系統。JTIDS系統采用TDMA的工作方式進行組網,但是,存在時隙分配、任務組劃分等策略。因此,實現JTIDS仿真訓練系統必須著力解決系統組網模式的問題。
2 JTIDS仿真訓練系統網絡結構設計
2.1 系統功能
JTIDS仿真訓練系統是JTIDS端機組成的Link16網絡的系統仿真,因此,系統必須實現實際網絡端機具備的角色分配、入網、通信、導航、監視、電子戰、空中控制等一系列功能。同時系統的實時性和安全性要求必須得到滿足。
系統功能包括:1)控制臺對仿真訓練進行統一控制,提供角色分配、任務劃分、入/退網控制。2)端機通過發送、接收PPL信息、狀態信息、電子戰信息實現導航、監視、識別、電子戰、空中控制等功能。
端機功能包括:1)端機產生并發送自身信息,獲得其他端機的信息。2)端機在本地數據庫建立所有其他端機的數據信息,并以此進行端機本地化操作。3)端機通過向控制臺發送入、退網請求,建立與控制臺的連接,完成隨時入、退網的功能。4)主控端機通過發送指令實現對指定端機的控制。
非功能需求包括:1)實時性要求,即端機進行的操作,能夠實現即時響應,端機對端機的控制能夠實現即時控制。2)記憶性要求,即在需要端機航跡的情況下,各端機能夠顯示出其他端機的航跡線,以及進行航跡相關。3)安全性要求,即系統工作中需要采用加密手段,防止信息、數據泄露,網絡中傳輸的必須是經過加密的數據包。
2.2 網絡結構設計
網絡結構是利用現有通信技術及協議方法制定的符合功能需求的拓撲結構。同時結構的設計要盡量簡單,以減少成本。
JTIDS仿真訓練系統采用C/S體系結構。如圖1所示。服務器端由控制臺和服務器數據庫組成。實現角色的分配、端機入/退網控制、任務分配和端機數據的存儲和轉發。客戶端由端機及其數據庫組成。實現自身數據的生成和其他端機數據的存儲。網絡模型采用OSI的7層模型設計。使用成熟的TCP/UDP協議實現網絡通信。各端機采用總線模式與服務器端相連,端機數據需要經過數據加密和防火墻控制實現安全通信,其邏輯圖如圖2所示。
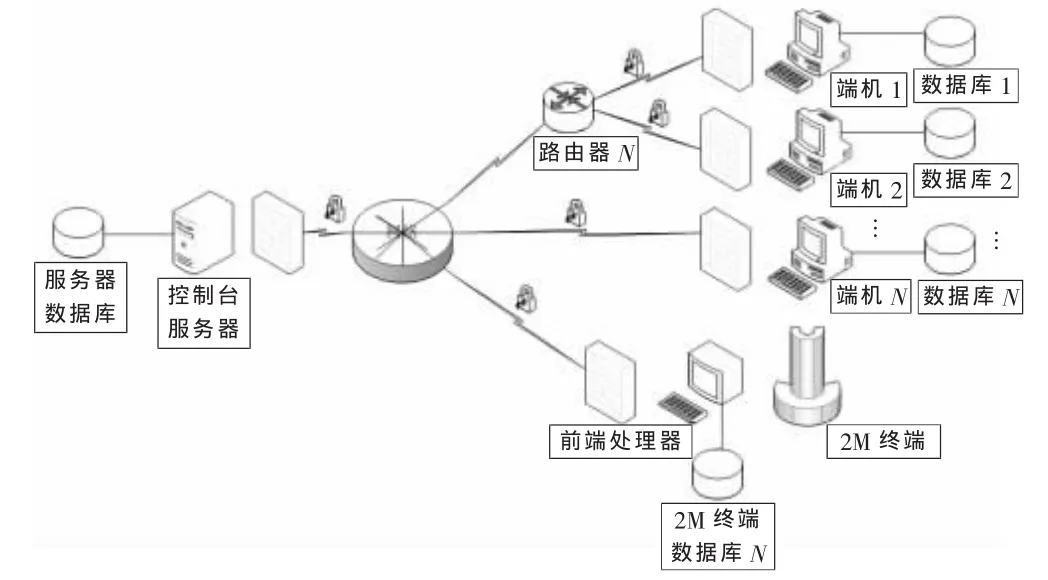
圖1 JTIDS仿真訓練系統網絡結構圖
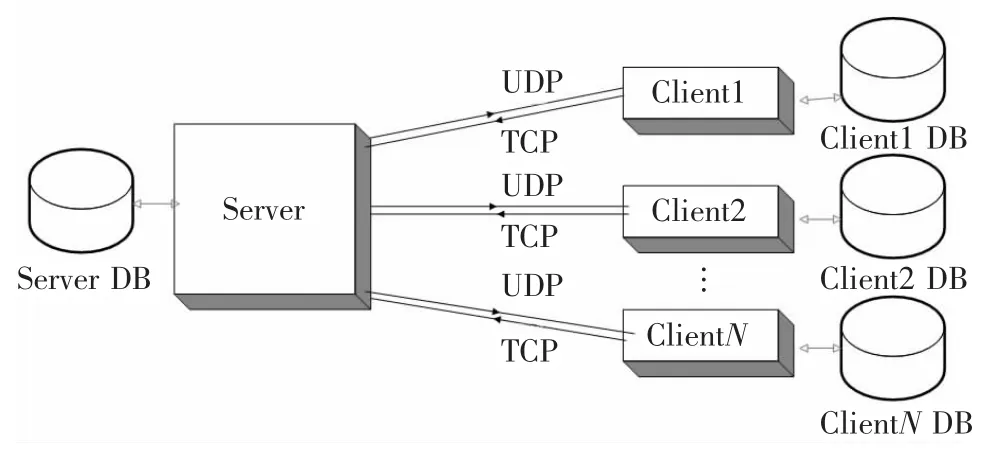
圖2 JTIDS仿真訓練系統網絡結構邏輯圖
3 JTIDS仿真訓練系統組網模式設計
系統組網的模式,由系統中各模塊通信的方式和通信鏈路條件決定。由于JTIDS仿真訓練系統需要實現PPL、狀態、電子戰等信息的端機獲取和廣播發送,需要滿足端機入網、端機控制指令的發送和響應,而且端機需要實現控制臺對其進行的角色分配和控制退網的操作。因此,對JTIDS仿真訓練系統的組網模式設計分為順序輪循模式和指令訪問模式兩種。
仿真訓練系統中根據角色的劃分,端機分為主控端機和一般端機兩大類。
3.1 順序輪循模式
順序輪循模式主要完成系統工作期間的PPL、狀態和電子戰等數據信息的獲取和發送。
各端機在入網的情況下,控制臺按照端機擔任角色,確定輪循的順序。即按照先主控端機、再一般端機的順序,控制臺進行輪循操作。
同時各端機因端機角色不同,發送的消息類型也不相同。一般端機發送PPL信息和狀態信息,而主控端機還需要發送電子戰消息和控制指令。因此,數據信息劃分為3種數據格式進行傳輸。數據格式定義為數據類型、端機優先級、信息優先級、上傳/下載、原目標地址、目標節點地址、數據長度和數據。其中,端機優先級由端機角色決定。而信息優先級決定了控制臺首先獲取優先級高的數據。其順序為PPL信息、電子戰信息和狀態信息。
在JTIDS仿真訓練系統的設計中,主控端機只有1臺。因此在順序輪循模式下,控制臺對端機的輪循順序為先主控端機,再一般端機;先編號低的一般端機,再編號高的一般端機;先優先級高的信息,再優先級低的信息。
系統工作時,控制臺向端機廣播,需要主控端機的PPL信息,各端機在收到消息后,確定消息目標是否為自身端機,主控端機這時就將控制臺需要的端機信息發送到控制臺。控制臺將獲得的主控端機的PPL信息存入控制臺數據庫中,并將信息以廣播的形式發送到各端機。各端機在收到信息后,存儲到本機數據庫中,以備后期操作使用。這一操作結束后,控制臺發送需要主控端機電子戰信息的廣播,操作同上。在這樣一輪結束后,控制臺再向各端機發送需要主控端機的狀態信息的廣播,操作同上。之后,控制臺再發送對一般端機PPL信息、狀態信息的廣播。當控制臺在向各端機廣播發送消息,沒有端機應答,則控制臺將再次發送相同的消息,如此3次,若沒有端機應答,則控制臺判定此端機已退網,此后,不再發送對此端機的信息需求廣播。其工作流程圖如圖3所示。
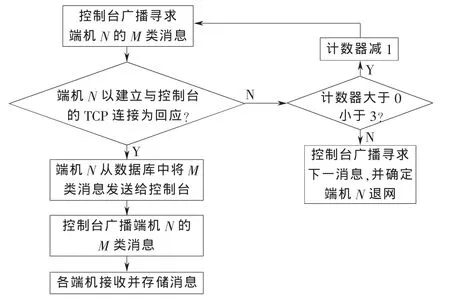
圖3 順序輪循模式工作流程圖
在這種輪詢方式下,所有的網絡成員共同組成了一個時分半雙工的網狀網。每個單元要么處于接收狀態,要么處于發射狀態。端機一般是處于接收狀態,當收到控制臺發來的信息時,端機才能發送自己的數據信息或者應答信息[3]。
3.2 指令訪問模式
順序輪循模式主要實現端機正常工作期間的端機工作,但不能實現端機與控制臺之間控制指令的及時傳輸和實時響應,因此提出指令訪問模式。
指令訪問模式為控制臺、主控端機、一般端機之間需要直接通信或間接通信,而在順序輪循模式之外發送控制指令。而指令訪問模式就是使這種控制指令能夠準確傳遞、實時響應的方法。
指令按照終端類型和功能分為兩類。終端類型指令分為控制臺指令、主控端機指令和一般端機指令。而功能指令分為角色分配指令、入網指令、退網指令和端機控制指令。其中,控制臺發送角色分配指令、控制臺控制端機退網指令。主控端機發送入網指令、端機控制指令和自主退網指令。一般端機發送入網指令和自主退網指令。
在端機入網時,各端機向控制臺發送入網請求,控制臺向各端機發送網內同步時間,實現同步入網。控制臺根據訓練指導者設定的要求,向各端機發送角色分配指令。
端機的退網一般有主動退網、控制臺控制退網和異常情況退網。異常情況退網為端機在斷電和程序錯誤的情況下,端機未發送指令而退網的情形,這種情況由順序循環模式處理。主動退網為端機向控制臺提出退網申請,控制臺根據端機角色,決定退網。如果是主控端機,選定接替端機,進行角色重新分配。控制臺控制端機退網,為控制臺指定一個或多個端機退網,其操作同主動退網。
指令按照數據格式的設定,存在端機優先級和功能優先級兩種。端機優先級決定了端機指令的處理順序,而功能優先級決定了相同級別端機控制指令處理的順序。但是,這種簡單優先級的控制,對于需要退網、入網、和角色分配的端機,仍會出現響應不及時的問題。因此,優先級的設定將主要采用功能優先為主、端機優先為輔的原則。指令優先級順序為入網、退網、角色分配、端機控制。即在指令隊列中,指令按照入網、控制臺控制端機退網、自主退網、角色分配、端機控制的順序進行處理。
但是,不排除由于指令量很大,導致控制指令不斷累積,造成的時間延誤和實時性變差。因此,設置指令有效期標識符,當指令時延超過門限,指令做拋棄處理。指令訪問模式流程如圖4所示。
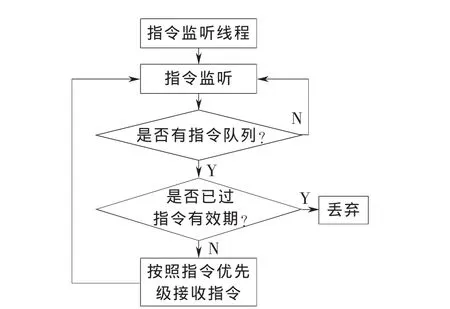
圖4 指令訪問模式流程圖
3.3 模式關系及處理方法設計
順序輪循模式能夠很好解決系統的PPL信息、狀態信息、電子戰信息等信息的傳送,實現通信、導航、識別、電子戰等功能。
但系統工作中,主控端機需要完成對端機的控制,實現對端機的任務指示、空中引導等功能。而且,系統允許端機的隨時入網和退網,這就使端機與控制臺之間的控制指令必須得以及時傳輸,這時順序輪循模式將不能滿足系統需要。
而指令訪問模式,主要處理端機入網、退網、角色分配以及主控端機對端機控制的指令。兩種模式的功能比較圖如表1所示。

表1 系統功能與模式分配表
為了實現順序輪循模式和指令訪問模式的并行工作,在處理上加入雙線程的方法,一條線程實現對端機的順序輪詢的操作,按照先從優先級高的主控端機獲得優先級高的數據信息,再按照端機優先級由高到低,數據優先級由高到低的順序獲取。指令訪問模式線程時刻監聽指令隊列。在有多條控制指令到達控制臺時,首先處理優先級高的控制指令,再處理優先級低的控制指令。當沒有控制指令時,則處于監聽狀態。
4 JTIDS仿真訓練系統組網建模仿真
4.1 仿真模塊架構
JTIDS仿真訓練系統組網屬于應用層的范疇,因此仿真模塊是基于NS2[4]的Application層開發,下層采用NS2提供的已有組件,同時新增了應用層模型和數據采集模塊,應用層模塊又分為控制臺節點模塊、鏈路分配模塊、初始分配模塊、文件存儲模塊和接口訪問模塊[5-7]。平臺各模塊如圖5所示。
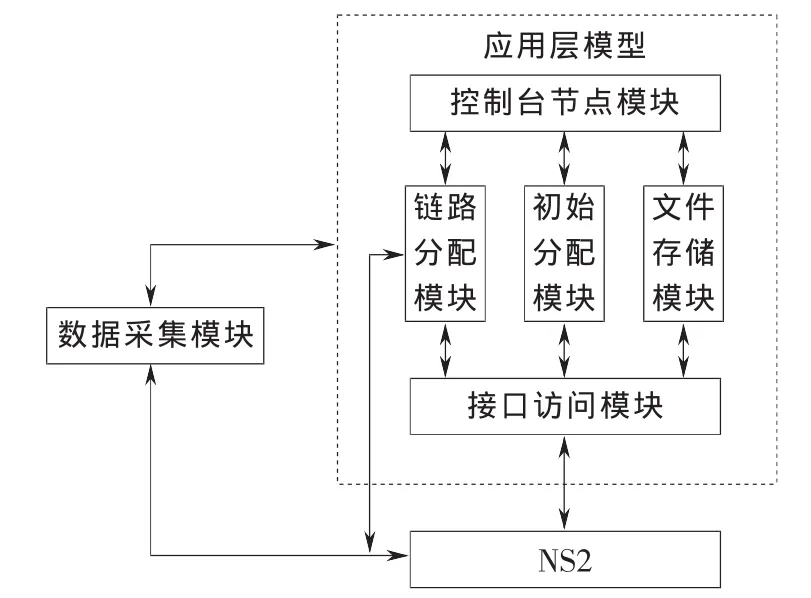
圖5 JTIDS仿真訓練系統仿真模塊圖
接口訪問模塊通過Socket接口實現與NS2的直接通信,實現上層模塊向下層的消息傳遞。
控制臺節點模塊確定參與端機數量、確定通信目標和通信方式,通過鏈路分配模塊實現邏輯鏈路的搭建和拆除,實現入網和信息發送。
鏈路分配模塊主要實現雙線程的操作,負責在與控制臺節點配合下的數據信息獲取和處理,同時與接口訪問模塊配合實現對上傳控制指令的監聽和處理。初始分配模塊為靜態初始化模塊,主要完成對入網端機的權限授予、功能分配等功能。文件存儲模塊為動態信息轉存模塊,不管是數據信息還是控制指令信息,都在與接口模塊的通信中進行庫操作。數據采集模塊集合了NS2中的狀態記錄文件*.tr的主要功能,將網路運行時間內,從控制臺節點模塊、鏈路分配模塊、初始分配模塊和文件存儲模塊所進行的數據操作全部記錄下來。
4.2 仿真場景設置
4.2.1 數據格式設置
J T IDS仿真訓練系統的數據類型、數據長度、工作方式都有所不同,其格式定義如圖6所示。

圖6 JIDS數據格式
J T IDS_TYPE指傳送消息的類型,主要包括數據信息J_Data、控制信息J_Control和廣播信息J_Broadcast。OR_Flag指傳送消息的方向,主要包括J_UP和J_DOWN。Level_Flag指信息的優先級。Src_addr指源目標節點地址。Dst_addr指目標節點地址。DATA_Length指數據長度,端機發送的數據信息有4種長度,分別是PPL信息、電子戰信息、狀態信息、控制信息。DATA為數據信息,NS2仿真為網絡性能仿真,因此數據格式中包頭為各種協議要求的內容,而數據字段都為空,只是標定數據字段長度。
4.2.2 仿真內容設置
根據仿真模塊圖,主要實現控制臺輪循對各端機信息訪問的順序輪循模式,以及端機控制指令的發送和控制臺的處理過程。因此,在順序輪循模式下實現端機數量與順序輪循周期的關系仿真。在有控制指令傳輸的情況下,仿真多指令發送延遲、終端數量、線程的關系以及單線程和雙線程處理模式下,多指令發送延時抖動的關系。
4.2.3 仿真設置與分析
網絡帶寬100 Mbit/s,網絡時延10 ms,路由器隊列長度為10,使用Droptail模式,廣播包大小為40 bit,指令包大小為200 bit,數據包大小為1 000 bit,假設端機發送數據信息為PPL信息和狀態信息,端機按照序號由低到高先后發送PPL信息和狀態信息,端機數量為1~40。
圖7為對順序輪詢模式端機數量與輪循周期的比較圖,在端機數量一定,端機發送消息類型相同的情況下,輪循周期隨著端機數量的增加成線性增長。同時可以得到推論,在端機數量一定、端機分配角色已知的情況下,端機輪循時間為定值。
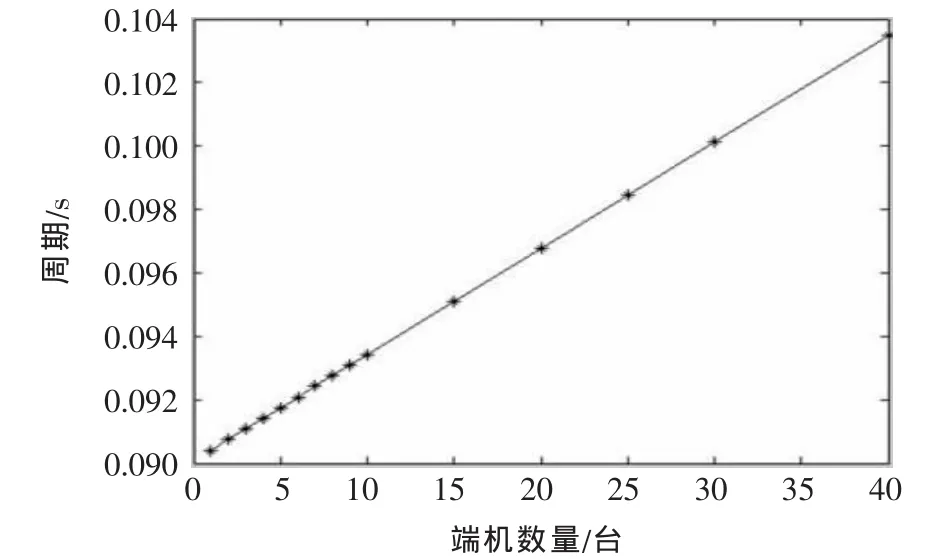
圖7 順序輪循模式周期、端機數關系
圖8為在有控制指令的情況下,端機指令到控制臺的延時情況對比圖。從圖中可以看出,單線程處理指令,時延較長且不穩定,使用雙線程處理指令延時很小,可忽略不計。
圖9為端機數量為5的情況下,單線程與雙線程指令延時抖動特性。從圖中可以看出,單線程的指令延時抖動很明顯。而在雙線程模式下,時延抖動很小,基本可以認為沒有抖動,保證了指令傳輸的實時性和穩定性要求。
5 小結
筆者設計了JTIDS仿真訓練系統的組網模式,并依據NS2仿真軟件設計了JTIDS仿真訓練系統的組網仿真模塊,通過在該模塊下的仿真,驗證了該組網模式能夠滿足JTIDS仿真訓練系統的穩定性和實時性要求。
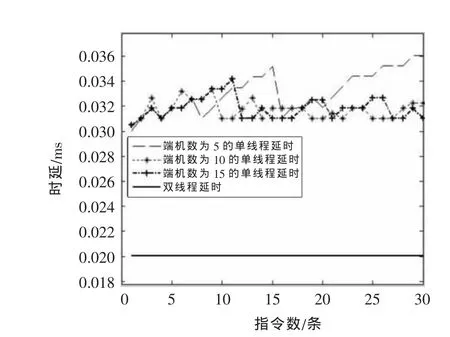
圖8 單、雙線程端機到控制臺指令時延
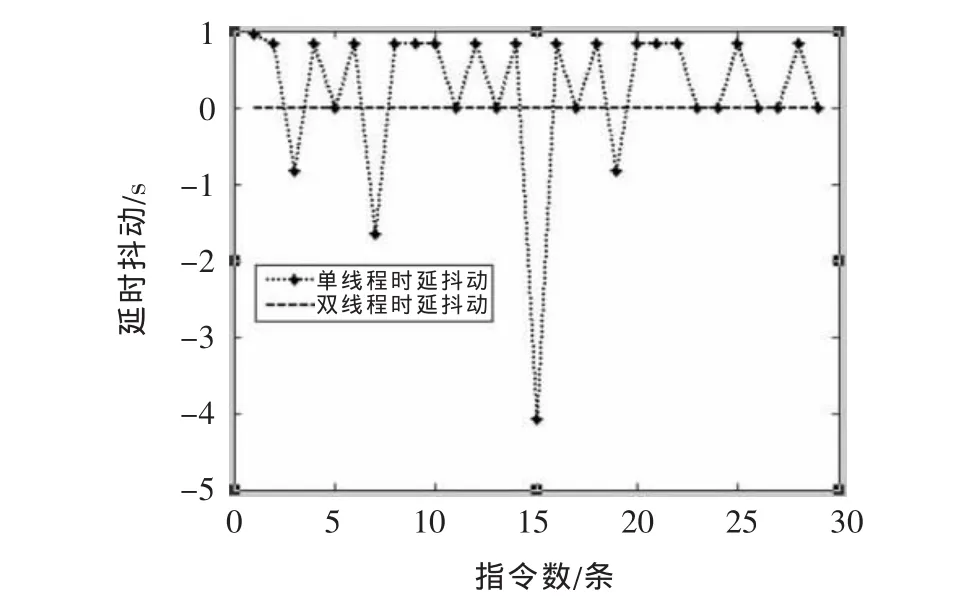
圖9 單、雙線程端機到控制臺延時抖動
[1]梅文華,蔡善法.JTIDS/Link16數據鏈[M].北京:國防工業出版社,2007.
[2]LESLIE C,GOLLIDAY J.DataLink communications in tactical air command and control system[J].IEEE Journal on Selected Areas in Communications,2005,3(5):779-791.
[3]李林,毛玉泉,李連寶,等.陸航數據鏈輪循組網模式應用研究[J].通信技術,2009(1):143-145.
[4]于斌.NS2與網絡建模[M].北京:人民郵電出版社,2006.
[5]吳堃,戴菡,葉保留,等.基于NS2的P2P網絡模擬平臺研究[J].系統仿真學報,2006(8):2152-2157.
[6]任浩,王勁林,魯逸峰,等.基于NS2的P2P流媒體系統仿真平臺的設計[J].微計算機應用,2008(10):26-30.
[7]PORTMANN M,SENEVIRATNE A.Cost-effective broadcast for fully decentralized peer-to-peer networks[J].Computer Communications Journal Special Issue on Ubiquitous Computing,2002,26(11):1159-1167.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
測控技術(2018年5期)2018-12-09 09:04:26
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
電子測試(2018年18期)2018-11-14 02:30:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
機電信息(2014年27期)2014-02-27 15:53:56
