模糊控制技術在磁懸浮軸承中的應用研究
2010-02-20 07:42:46陳淳輝孫從科楊慶文
裝備制造技術 2010年6期
關鍵詞:系統
陳淳輝,孫從科,楊慶文
(海軍蚌埠士官學校,安徽蚌埠233012)
磁懸浮技術屬于自動控制技術,它是隨著控制技術的發展而建立起來的。磁懸浮的作用,是利用磁場力使某一物體相對于基準框架保持固定位置。由于磁懸浮體與支撐部件之間沒有任何接觸,克服了由于摩擦帶來的能量消耗和速度限制,具有長壽命、無污染、無噪聲、低能耗、不受任何速度限制、安全可靠等優點。目前已廣泛地開展磁懸浮軸承控制系統的理論研究。隨著控制理論的不斷完善與發展,采用先進的控制方法與算法,對磁懸浮軸承控制系統進行控制和設計,使系統具有更好的穩定性。特別是人工智能技術的產生,帶來了磁懸浮控制系統向智能化方向快速發展。本文就模糊控制技術在磁懸浮軸承控制系統中的應用,作一些研究與探討。
1 磁懸浮軸承系統的工作原理
磁懸浮軸承系統是由以下5部分組成:控制器,轉子,電磁鐵及線圈,傳感器和功率放大器等。其中核心部件是控制器,控制器的性能基本上決定了整個磁懸浮軸承系統的性能。控制器的控制規律,決定了磁懸浮軸承系統的動態性能和穩定性。
磁懸浮軸承系統是一個非常復雜的機電一體化系統,用數學模型精確地描述是非常困難的,一般都采用在平衡點附近進行分析,再進行線性化處理。在不考慮五自由度之間耦合的情況下,本文僅對單自由度磁懸浮軸承系統的工作原理進行分析,如圖1所示。
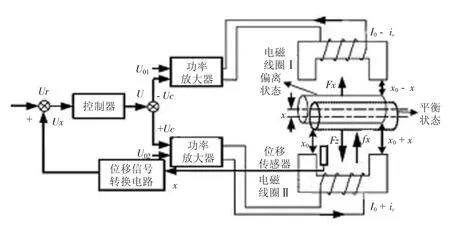
圖1 單自由度磁懸浮軸承工作原理
系統工作原理是:電磁鐵繞組中通以一定的電流,會產生電磁力,控制電磁鐵繞組中的電流,使之產生的電磁力使轉子可以懸浮在“空中”而處于平衡狀態。但這種平衡狀態是一種不穩定平衡,這是由于電磁鐵與轉子之間的電磁力大小與它們之間的距離成反比,只要平衡狀態稍微受到擾動(如電壓的波動等),就會導致平衡被破壞,因此必須對系統實行閉環控制。由位移傳感器組成的測量裝置,檢測轉子與電磁鐵之間的距離變化。當轉子在偏置電流I0的作用下處于平衡位置x0,若某時刻出現某一干擾fx,轉子就會偏離平衡位置,偏移距離為x,為使轉子回到平衡位置,須通過控制電流ic,使電磁鐵Ⅰ的磁力減小,電磁鐵Ⅱ的磁力增加。在不考慮重力等其它力的作用下,此時轉子所受的力為

其中,
μ0為導磁率;
s為氣隙截面積;
N為線圈匝數。
加在磁鐵線圈上的電壓經控制器調節、功率放大器放大處理后,電壓減小,從而使電磁鐵Ⅰ控制繞組中的電流相應減小,電磁力減小;使電磁鐵Ⅱ電壓增大,控制繞組中的電流相應增大,電磁力增大,轉子被吸回平衡位置。反之亦然。從以上分析可知,該控制系統要實現對轉子的穩定懸浮,其關鍵是設計一個具有良好調節作用、對外界干擾抑制能力強的模糊控制器。
2 模糊控制器的設計
基于模糊控制的磁懸浮軸承轉子控制系統結構圖如圖2所示。
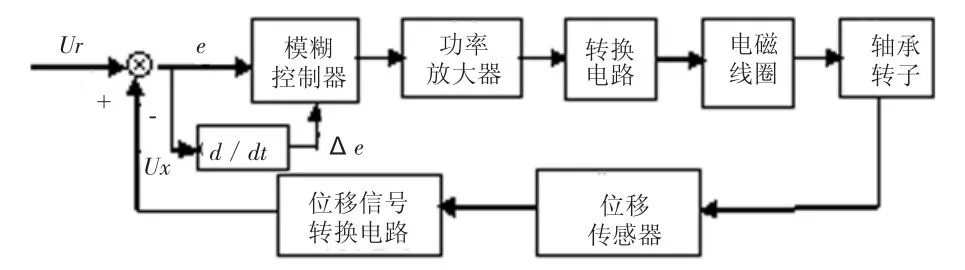
圖2 磁懸浮軸承模糊控制系統
圖中,
Ur為給定電壓;
Ux為實測位移轉換得到的電壓;
e為電壓偏差:e=Ur-Ux;
Δе為電壓偏差變化率:Δе=d/dt;
u為模糊控制器的輸出調節電壓,此電壓通過功率放大器放大,并轉換成電流加在電磁鐵線圈上。
模糊控制器的作用,是根據設定電壓和實測位移轉換得到的電壓之間的偏差,經模糊推理輸出調節電壓,通過電路將電壓轉換電流,從而控制電磁鐵線圈的電流大小,來實現轉子的穩定懸浮。
本文采用查表法進行磁懸浮轉子模糊控制器的設計。模糊控制器的硬件結構,將采用單片機來實現。因此,為了節約內存和運行時間,實際控制過程中不進行實時推理,而是離線計算輸入、輸出的對應關系,并以表格的形式存儲在單片機的內存中,單片機根據實測輸入值查詢表格,得到相應的輸出值。查表法設計模糊控制器按以下步驟進行:
2.1 模糊化
模糊化,是指將輸入變量的精確值轉化成適當論域上的語言變量值(即模糊輸入值),即確定各輸入、輸出量的變化范圍,及其對應語言變量的論域元素和量化因子K1、K2、K3。以實測位移轉換得到的電壓Ux和給定電壓Ur的偏差e和偏差變化率Δе作為輸入變量,控制器的輸出電壓u作為輸出變量,取電壓偏差e的基本論域[-10,l0]V,其語言變量E的論域為X=[-4,-3,-2,-1,0,1,2,3,4],則偏差 E 的量化因子為 K1=4/10=2/5;偏差變化率Δе的基本論域為[-60,60]V/s,其語言變量 EC 的論域為 Y=[-4,-3,-2,-1,0,1,2,3,4],則偏差變化率的量化因子K2=4/60=1/15;輸出控制量的基本論域為 [-10,l0]V,輸出語言變量U的論域 Z=[-4,-3,-2,-1,0,1,2,3,4],則得到輸出控制量的比例因子 K3=10/4=5/2。
2.2 模糊推理
模糊推理是指以知識庫為基礎,通過一定的推理機制,由模糊輸入值得到模糊輸出值的過程。考慮到實用的原則,輸入變量和輸出變量各為5個語言值:負大(NB),負中(NS),零(ZE),正中(PS),正大(PB),輸入及輸出變量的隸屬度函數均采用三角形,則語言變量論域上用以描述模糊子集(NB、NS、ZE、PS、PB)的隸屬度函數如圖3所示。
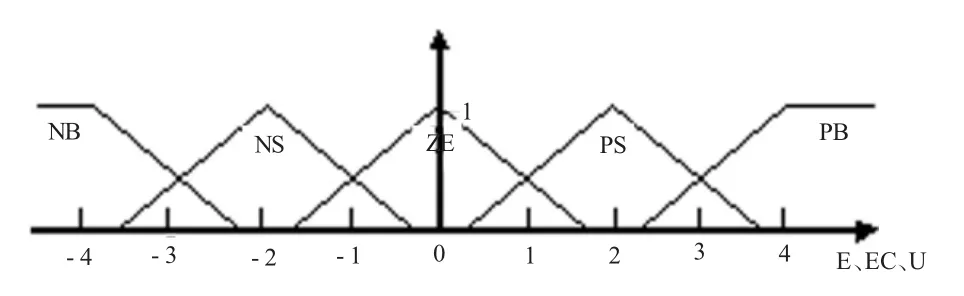
圖3 輸入、輸出量的模糊定義
根據以往控制過程中的實踐經驗加以總結,得到采用“IF-THEN”形式的推理規則。當e為負大時,此時無論Δе的變化如何,為盡快消除偏差,應使控制量增加較快,所以控制量的變化取正大,即有
(1)IfE=NB And EC=PB Then U=PB;
(2)IfE=NB And EC=PS Then U=PB;
(3)IfE=NB And EC=ZE Then U=PB;
(4)IfE=NB And EC=NS Then U=PB。
當e為負小或0時,主要矛盾轉化為穩定性問題。為了防止超調并使系統盡快穩定,根據偏差的變化率來確定控制量的變化。若Δе為正,表明偏差有減小的趨勢,所以取較小的控制量。得到如下控制規則:
(5)IfE=NS And EC=ZE Then U=PS;
(6)IfE=NS And EC=PS Then U=ZE;
(7)IfE=NS And EC=PB Then U=NS;
(8)IfE=ZE And EC=ZE Then U=ZE;
(9)IfE=ZE And EC=PS Then U=NB;
(10)IfE=ZE And EC=PB Then U=NB。
若Δе為負,表明偏差有增大的趨勢,所以要使控制量增加,須用如下控制規則:
(11)IfE=NS And EC=NS Then U=PS;
(12)IfE=NS And EC=NB Then U=PB
(13)IfE=ZE And EC=NS Then U=PS;
(14)IfE=ZE And EC=NB Then U=PB。
取得以上對應偏差為負或0時的控制規則后,根據系統的工作特點,當偏差為正時,也可得其相應的控制規則。由此可得到整個過程的所有控制規則,得到表1所示的控制規則表。
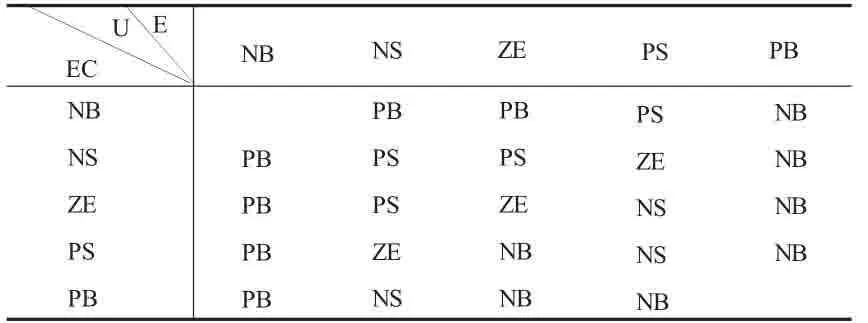
表1 模糊控制規則表
根據扎德模糊推理算法,采用“極大—極小值”法,得到控制量相應的模糊截集。然后把對應于當前輸入值的所有有效規則推理得到的控制量的模糊截集進行“并”處理,再按重心法原則,對輸出模糊量進行模糊判決得到控制量。構成模糊控制器的控制表(如表2所列)。
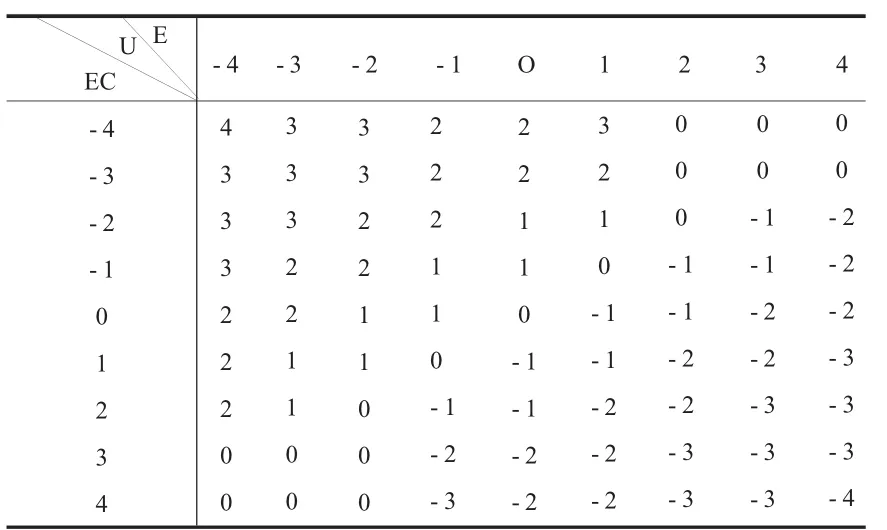
表2 模糊控制器的控制表
2.3 反模糊化
反模糊化是指由模糊輸出值得到精確輸出值的過程。由模糊控制規則表相應變化量的模糊值乘以比例因子K3,即得到控制量的精確輸出值。
2.4 系統的模糊控制實現
(1)第一步是在每個控制周期中采集系統的輸出U(K),求得實際偏差 e(K)和偏差變化率 Δе(K):e(K)=Ux(K)-Ur(K),Δе(K)=e(K)-e(K-1)。
(2)第二步是將實際e(K)和Δe(K)分別乘以其對應的量化因子K1、K2,取得相應論域元素表征的查找控制表所需的Xi、Yi值,即:Xi=Kl×e(K),Yi=K2×Δe(K)e(K)。
(3)第三步是以Xi和Yi查找控制表的行和列,得到輸出控制量的論域值Uij。
(4)第四步是將查表得到的控制量論域值Uij乘以比例因子K3,即u=K3×Uij,得到實際控制量u輸出去控制被控對象。模糊控制器的控制表在單片機內存中是某一連續數據區,如要找到Uij,按照定位原則查得Uij的地址即可。
3 實驗仿真分析
為了驗證本文提出的設計方法,下面將對磁懸浮軸承轉子的模糊控制系統進行仿真實驗。控制對象選擇實際控制任務中較常見的二階加時延,設其傳遞函數為
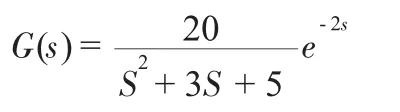
二維模糊控制系統仿真模型框圖如圖4所示。
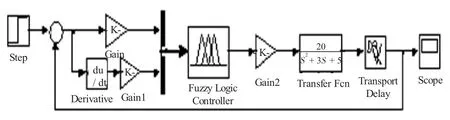
圖4 二維模糊控制系統仿真模型圖
偏差e和偏差變化率ec及控制器輸出u的隸屬函數,均取均勻分布的三角形隸屬函數。在單位階躍信號作用下,量化因子Ke=0.05,Kec=0.01以及比例因子Ku=1.25;所用模糊控制規則如表1所示(表格中為“空”表示無規則),得到系統輸出波形如圖5所示。在階躍信號設定為5作用下,量化因子Ke=0.05,Kec=0.01以及比例因子Ku=6.25,得到系統輸出波形如圖6所示。
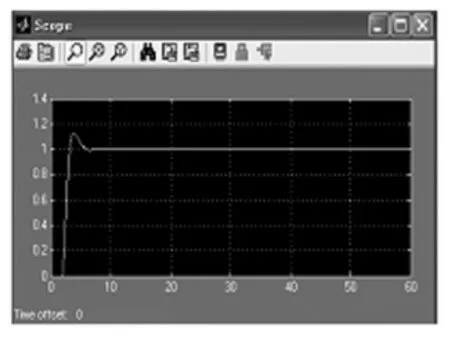
圖5 單位階躍信號作用下系統輸出波形
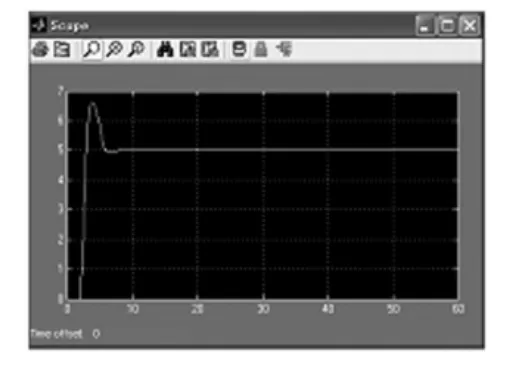
圖6 階躍信號設定為5作用下系統輸出波形
4 結束語
根據以上的仿真效果圖,表明本文所設計的模糊控制器能夠很好地控制轉子的平衡問題。再經過多次調試,證明其系統工作穩定可靠,動態性能效果較好。該模糊控制系統和以往的模擬控制系統和數字控制系統相比,模糊控制器對于對象參數變化的適應性強,即系統具有較強的魯棒性,具有一定推廣價值。
[1]湯兵勇,林 吉.模糊控制理論與應用技術[M].北京:清華大學出版社,2002.
[2]張化光,希 勤.模糊自適應控制理論及其應用[M].北京:北京航空航天出版社,2002.
[3]張國良,曾 靜,熙 政,方 林.模糊控制及其MATLAB應用[M].西安:西安交通大學出版社,2002.
[4]李國男.智能控制及其MATLAB實現[M].成都:電子工業出版社,2005.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
