智能車參賽設計技術報告(節選)
2009-09-24 10:05:58李嵩孫文靜瞿佳璐
電子產品世界 2009年9期
李 嵩 孫文靜 瞿佳璐
摘要:車模的圖像是車模穩定性的關鍵,機械部分是速度的關鍵,優良的輔助調試系統是高效率調試的前提,而其它的控制、驅動、決策等部分在以上部分良好的前提下,則顯得相對次要本次車模的制作目標應著重提升機械性能,并提高圖像質量。
關鍵詞:智能車;攝像頭;偏振鏡;圖像采集
車模的機械部分是影響其行駛性能最直接的部分,其重要性不言而喻。一個不良的機械系統會增加控制的難度。會為車模的速度提升帶來障礙。因此,車模的機械性能應該是優先考慮的問題。

攝像頭的安裝
大量事實證明,重心越低越好。為降低重心,并同時保證圖像視野寬度,最好的方法就是使用旋轉攝像頭。在08年的第三屆比賽中,攝像頭一舵角連動機構在Racerx的車上取得了出人意料的成效,但也暴露出了一些機構固有的問題,其中包括:機構虛位導致攝像頭定位不準,攝像頭在中位附件容易振蕩。因此需要對機構進行改良。改良方法如下。
(1)增加自動回正機構,給旋轉攝像頭提供自動回正力矩、以減小機構虛位。
(2)給旋轉攝像頭機構調靜平衡,減少車模在過彎過程中離心力對攝像頭的影響。
(3)用滑槽代替原本中間的連桿球頭,為旋轉攝像頭在中位附近制造一段死區,使車模在打小角度舵角時,攝像頭不轉,從而增加車模在直線和小s彎中的穩定性。
改良的機構三維圖如圖2所示。
綜上所述,這是一個帶有死區及自動回正機構的旋轉攝像頭機構。此外,在控制方面,可以設法檢測出攝像頭旋轉的角度,并將其反饋在控制算法里。檢測攝像頭角度的方法大致有以下兩種:
(1)在車頭劃線做標記,用攝像頭檢測車頭標記,來判斷自己所轉的角度。
(2)由于舵機s3010是模擬舵機,其中是用電位器來反饋舵角的,因此可以將此電位器的信號飛線引出來,用單片機內部AD進行采集。
偏振鏡的使用
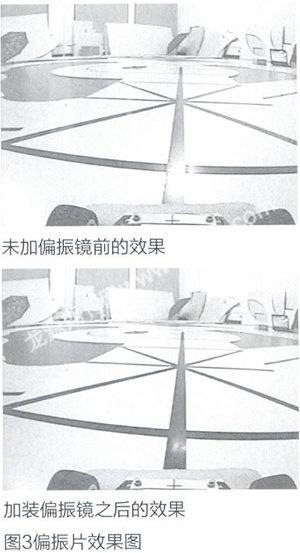
由于追求更好的機械性能,我們把攝像頭降低,達到降低重心的目的。但是由此帶來了反面的影響,那就是圖像的形變以及受到跑道面反光的影響。跑道上的黑線由于反光原因,攝像頭檢測的數據丟失黑線。為了解決反光導致檢測不到黑線的問題,我們利用了偏振鏡。偏振鏡的作用其實是過濾掉某個角度的偏振光,實現檢偏的作用。當自然光經過跑道面以后,會產生偏振光,這反射的偏振光會影響到圖像的采集。通過在攝像頭前面安裝偏振鏡片,并且調整偏振鏡片的檢偏角度,可以得到幾乎無反光影響的圖像。如圖3所示。
不過,使用偏振鏡也會帶來問題。雖然偏振鏡能把跑道的偏振光過濾掉,但同時把環境的自然光強度降為原來光強的二分之一,也就是說通過偏振鏡之后光線變暗了。在光線強度較大的時候不會有太大影響、但是如果環境光比較弱的時候,加了偏振鏡會使攝像頭感應的光線更弱。而大多數攝像頭具有自動曝光功能,在光線昏暗時,攝像頭會自動增加曝光時間,導致圖像更容易模糊。因此,使用偏振鏡要合理權衡利與弊才能發揮偏振鏡的作用。

圖像采集模塊
清晰穩定的圖像是一切的基礎,因此今年我們在攝像頭選擇和多種采集方案的測試上花了很多功夫。
攝像頭選擇
由于CMOS攝像頭重量輕、功耗低,因此依然十分有吸引力,所以我們對CMOS與cCD再次進行對比測試,測試用的CMOS攝像頭為康美迪亞的1/3 CMOS,圖4為CMOS攝像頭與CCD攝像頭的原始圖像,可以看到CMOS圖像中的噪點遠遠多于CCD的圖像。并且CMOS攝像頭在拍攝運動圖像時容易發生模糊。
動態圖像模糊主要是在光線較暗的環境下,為了保持圖像亮度,攝像頭自動將曝光時間增大所致。要徹底避免圖像模糊情況的出現,就要手動設置攝像頭曝光時間,于是我們又測試了1/3數字攝像頭OV7620、通過SCCB將攝像頭設置到手動模式,手動修改其曝光時間。
圖像采集方案
今年我們測試了很多種采集方案,首先由于更換了主頻更高的s12XS128,我們對其內部AD又進行了測試,結果很失望,盡管主頻增高。最高精度從10bit增加到了12bit,但是AD的轉換時間并沒有多少改善,88MHz主頻下行像素在80左右。之后我們又測試了外部二值化采集、數字攝像頭采集、外部AD加LM1881采集、視頻解碼芯片采集。其中視頻解碼芯片圖像質量最好,并且有圖像預處理電路,但由于實驗電路還在測試階段,本次比賽并沒有啟用,仍然延用了去年的外部AD采集方案。
電機驅動橫塊
去年我們使用S14430,模仿電子調速器制作了驅動電路,取得了不錯的效果,但是對于能耗剎車的剎車能力始終存在爭議,因此我們對能耗剎車和反壓剎車做了對比測試。
參考第三屆上海交大SpeedStar隊的技術報告,我們使用BTS7970制作了驅動電路,其原理如下。該電路有一路PWM輸入,兩根I/O線作為模式選擇線,可以有正轉、反轉、能耗剎車三種工作模式。
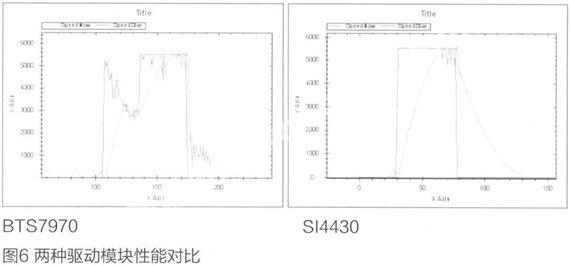
我們使用“白騎士”模型車的驅動電路與上述電路(圖5)進行對比測試,圖6是車模的速度曲線,其中淺色的線為給定速度,深色的線為實際速度,縱坐標單位為mm/s,橫坐標單位為幀(即40ms)。
比較以上速度曲線,兩種驅動在加速能力上相差不大,而反壓剎車的減速能力遠高于能耗剎車。因此,可以得出結論,對于比賽所提供的380電機而言,10mΩ左右內阻的驅動電路已經足以滿足要求,反壓剎車的效果是遠好于能耗剎車的,而用BTS7970制作驅動電路是一個簡單易行方案。
SD卡
SD卡宴時存儲系統是我們去年率先提出和使用的輔助調試手段,極大地提高了調試效率,今年我們繼續延用并對sD卡存儲的速度和穩定性做了改進。去年我們使用的MC9S12DG128,在設計之初主要考慮到SD卡為3.3V系統,而單片機為SV系統,之間需要邏輯電平轉換,為此我們在設計SD卡電路時在單片機輸入端加了三極管放大。今年我們使用的MC9S12XSl28可以支持3.135V到5.5V的寬電壓供電,我們使用3,3V供電就可以實現與SD卡接口的直連,這樣可以提高讀寫SD卡的穩定性。
點評:該隊在攝像頭中的偏振鏡的使用及圖像采集模塊、SD卡、電機驅動模塊等部分比較有特色。設計充分利用組委會提供的硬件,在一定程度上發揮了飛思卡爾產品在處理能力上的優勢,并通過幾屆大賽經驗總結,有效提升了賽車的性能。指導教師:陳萬米,蔡慶楠