淺談雷達多目標跟蹤系統
2020-04-30 15:44:36
中國新技術新產品 2020年3期
(航空工業沈陽飛機工業(集團)有限公司,遼寧 沈陽 110850)
1 單雷達系統
雷達追蹤系統通過計算機來處理和監控目標,并結合數學技術對數據進行處理。在雷達追蹤系統中,多雷達數據主要是將雷達監測技術作為核心,只有將數據融合在一起對目標進行分析才能發揮出多雷達跟蹤系統的優勢。圖1 為雷達目標追蹤的示意圖。
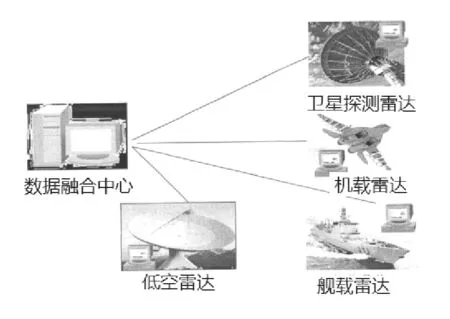
圖1 雷達目標追蹤系統圖
單雷達系統主要由數據處理和航跡提取2 個部分組成。數據的預處理主要是對數據進行坐標轉換,將數據中存在異常的去除掉,一些數據龐大的文件需要進行壓縮處理并上傳,預處理的主要目的是將一些原始數據中會影響最終結果的誤差和干擾排除掉,提高數據的質量,為后期進行數據處理奠定基礎。
單雷達系統追蹤主要依據地心坐標系、笛卡爾坐標系以及機載地理坐標系。坐標系用于檢測載體的質心位置,主要的坐標系有X 軸(縱軸上的正向),Y 軸(機載的右翼方向),Z 軸(根據右手螺旋定則確定)。
通過對雷達坐標系的分析可以發現,雷達系統和飛機使用的坐標系不同,從而導致數據處理后得到的結果也不一樣。所以在處理數據的時候,需要對坐標系進行轉換仿真。仿真數據為大地坐標系下標準數據,利用經度、緯度和高度的三維數據來表示被跟蹤目標所在的位置。在航跡融合時需要在大地坐標系與大地空間直角坐標系之間進行轉換,如圖2 所示[1]。
雷達對目標進行監控時,需要探測軌跡點,然后進行采集。在監控與探測時會用到聚類算法。聚類是對數據間的關系進行分類和劃分,將相同的數據或者具有高相似度的數據歸為一類,將不同的數據或者彼此排斥的數據歸為另一類,由于雷達監控目標的數據信息量非常大,同時數據具有很高的實時性,所以使用聚類處理的方法很有必要[2]。

圖2 航跡坐標系轉換示意圖
對單雷達的軌跡數據進行提取時,需要用到過濾系統。在飛機或者目標進入雷達監控區域后,雷達會立即對其進行監控并獲取該目標的位置以及相關信息,對目標的速度和姿態數據進行收集。雷達會隨著該目標在該區域的運行軌跡和規律將數據傳輸回處理器中,形成一個數據集合。這個數據集合不斷更新,直到目標消失或者離開雷達監控區域,最終將數據上傳到融合中心。
數據上傳之后,計算機對數據進行處理,通過處理將目標的軌跡繪制出來,對數據進行分析后發現有重疊或者雜亂的軌跡,這些異常的數據需要利用門限過濾系統進行處理。門限過濾系統是通過門限對軌跡進行過濾,將一些不必要的軌跡剔除,這其中也包含噪聲和干擾等數據。
單雷達系統通過聚類方法和門限過濾系統可以對數據進行處理,這樣就可以得到最平滑的運動軌跡。雷達監控系統在軌跡提取的過程中,如果軌跡的間隔在300 s 以上,可以認為這2 個軌跡不是同一個軌跡,同時在監控的過程中,每個雷達的軌跡數據有10 個以上的不同點數,如果每個點數的時間在30 s 以上,也將這種軌跡視為不同的軌跡[3]。
2 多雷達系統
相對于單雷達系統的監控和數據分析而言,多雷達系統的數據非常復雜。但是對于探測對象來說,多雷達系統的監控范圍更廣、精度要比單雷達系統要高。多雷達系統在對軌跡進行數據處理時,需要對軌跡進行一一比對,但是可以對不同雷達探測的對象進行合一處理,實現雷達數據之間的共享和最終的數據處理。在目標運動到雷達監控區域后,多個雷達同時對該目標進行監控,每個雷達會測量自己的數據,形成不同的軌跡,通過模糊理論和運動學模型來完成航跡對的提取。
雷達在完成目標采集后,可以通過不同雷達監控軌跡的相似程度來判斷其是否為同一個目標。在監控數據中,由于不同雷達之間存在精度差異,導致雷達數據之間的精度不同,測量間距也不同,從而導致數據存在明顯差異。
如果數據有很明顯的規律或者目標在同一時間段、不同雷達上顯示的運動是相似的,那么就直接表明該目標為同一個目標。根據運動模型的分析方法,可以對目標的軌跡進行數據分析,建立常速運動和平面拋體運動2種模型。
建立目標軌跡運動模型后,將一個時間設為搜索的中心,在該時間內收集目標的運動軌跡數據,并對數據進行運動模型分析[4]。
在對模具進行運動分析時,需要將噪聲加入勻速運動和平面拋體運動的模型中。在一定范圍內進行隨機分布,建立搜索算法,以時間作為基準得到最終的軌跡,這一過程主要包括5 個步驟。1)如果目標出現在單個雷達的監控區域時,需要對探測到的數據進行時間排序,再將數據鎖定在某一段時間內,最終計算出目標的運動參數。2)當目標進入另一個雷達的監控區域后,2 個雷達同時對同一個目標進行鎖定,并將軌跡提取出來。3)將搜索到的軌跡與最相近時間段內的軌跡數據提取出來,計算波動參數,再進行判斷。4)重復步驟1~3,直到將目標系統的整個運動軌跡顯示出來。5)在顯示出運動軌跡之后,需要對軌跡進行剔除處理,將數據中的偏離或者干擾數據刪除掉,最終形成一個完整的軌跡。
在多雷達系統的數據中,時間是一個非常重要的基準,在處理數據時需要與時間匹配,這樣做的主要目的就是將不同雷達探測到的頻率整合到同一個標準內,對數據進行處理,如圖3 所示。
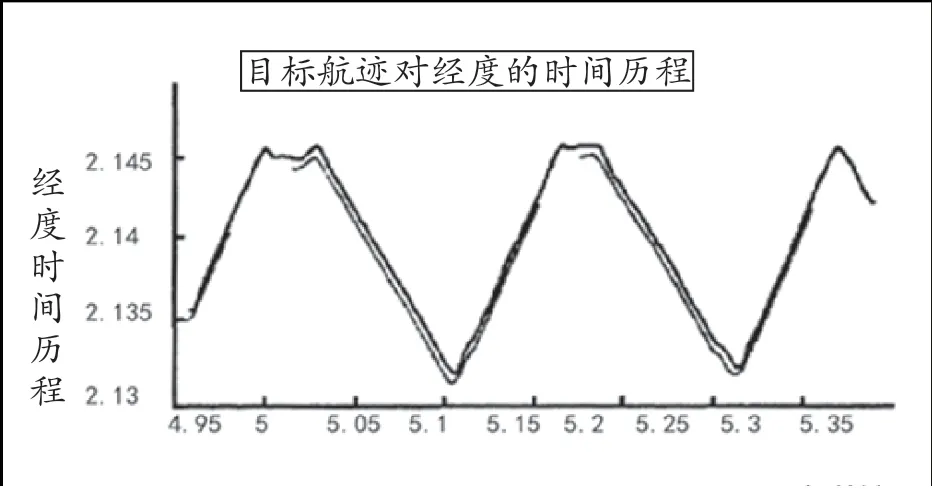
圖3 軌跡與時間的關系圖
從圖3 中可以分析出雷達在同一時間內完整的目標軌跡。但是在某一段時間內存在著受到干擾或者某些限制的另一個軌跡,如果在這種情況下對數據進行融合,只會顯示一個雷達數據,必須通過與時間匹配將另一條軌跡空白的位置補充上,軌跡融合的時間進行匹配是必要的準備工作,也是可以反映真實目標的條件,配準后的2 條航跡經緯度時間歷程應該相互對應[5]。
3 結論
該文以航空雷達作為研究對象,對其數據處理方式進行了分析,同時對飛機的飛行過程進行了研究,結合單雷達處理系統和多雷達處理系統,分析飛機的運動和飛行軌跡,預測飛機的飛行方向,實現對飛機飛行軌跡的監控,為飛機監控和指揮提供基礎數據支撐,在對多目標系統進行研究分析時,需要對目標的數據進行預處理和航跡處理,通過這些研究和分析,實現飛機的監控與數據采集,保證飛機的飛行安全。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45