Matlab/Simulink仿真技術(shù)在艦船推進(jìn)裝置中的應(yīng)用
2007-09-20 05:49:22陸金銘
船海工程 2007年4期
景 民,陸金銘
(江蘇科技大學(xué) 機(jī)械與動(dòng)力工程學(xué)院,江蘇 鎮(zhèn)江212003)
推進(jìn)裝置的設(shè)計(jì)是艦船動(dòng)力設(shè)計(jì)中最重要的環(huán)節(jié),總體設(shè)計(jì)必須從船、機(jī)、槳的配合特性出發(fā),合理地選配船、機(jī)、槳、傳動(dòng)設(shè)備的特性參數(shù),實(shí)現(xiàn)船、機(jī)、傳動(dòng)設(shè)備、軸系、槳的最佳配合,保證船、機(jī)、槳在最佳狀態(tài)下運(yùn)行,即實(shí)現(xiàn)推進(jìn)裝置能量的最佳轉(zhuǎn)換。因此,對(duì)艦船推進(jìn)裝置的模擬仿真也就是基于對(duì)這幾大部分的建模,然后使用計(jì)算機(jī)技術(shù)進(jìn)行仿真分析,根據(jù)仿真結(jié)果分析艦船動(dòng)力推進(jìn)裝置的性能及控制規(guī)律[1]。
1 仿真實(shí)例
1.1 船機(jī)槳數(shù)學(xué)模型
1.1.1 船槳數(shù)學(xué)模型
船槳系統(tǒng)中包括推進(jìn)裝置的旋轉(zhuǎn)運(yùn)動(dòng)和船的直線運(yùn)動(dòng)兩個(gè)慣性體系(分別稱為轉(zhuǎn)動(dòng)和平動(dòng)系統(tǒng))。這兩個(gè)體系間有力(距)和能量的傳遞。力(距)和能量與這兩個(gè)體系的共同工作狀態(tài)有密切的關(guān)系[2]。
船舶在敞水中螺旋槳產(chǎn)生的推力Tp為:

螺旋槳的負(fù)荷力矩(即螺旋槳上的水阻力距)Mp為:

其中:KT——螺旋槳的推力系數(shù);
KQ——轉(zhuǎn)矩系數(shù);
n——螺旋槳的轉(zhuǎn)速;
ρ——水的密度;
D——螺旋槳的直徑;
J——螺旋槳的進(jìn)程比;
θ——螺旋槳的螺距角;
Vp——螺旋槳的進(jìn)速。
通常情況下Kp、KQ與J和θ之間的關(guān)系無法用解析式表達(dá),而需要利用螺旋槳的圖譜獲得。仿真時(shí),可把KT-J,θ和KQ-J,θ曲線存入計(jì)算機(jī),構(gòu)成函數(shù)發(fā)生器。數(shù)字仿真情況下可以把曲線變成表格函數(shù),斷點(diǎn)數(shù)據(jù)存入內(nèi)存,使用內(nèi)插值法求值。為滿足動(dòng)態(tài)仿真的需要,要求使用的螺旋槳的特性曲線畫在四個(gè)象限內(nèi)。此特性曲線僅在較局限的工況范圍才適合使用,例如當(dāng)n→0時(shí),J→∞。因此需要有其它的描述螺旋槳特性的方法,使之構(gòu)成函數(shù)發(fā)生器,能夠在大工況范圍內(nèi)使用。本文建立仿真模型時(shí)使用進(jìn)角系數(shù)法,φ=arctg。式(1)和(2)可以寫成:

式中:CT=KTcos2φ CQ=KQcos2φ
對(duì)螺旋槳的四象特性(即CT-μ和CQ-μ特性)做Chebyshev多項(xiàng)式擬合,結(jié)果如下:
推力特性

轉(zhuǎn)矩特性
式中
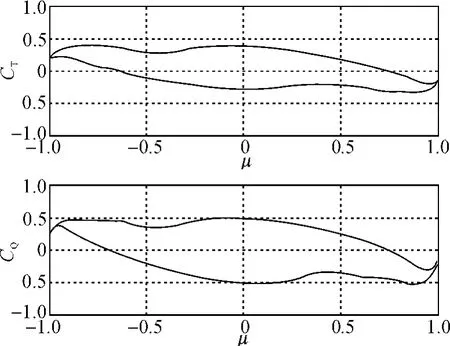
圖1 CT-μ 和CQ-μ 特性曲線
在推進(jìn)特性的實(shí)際仿真中,從精度和時(shí)間效率兩方面考慮,決定采用8階的Chebyshev多項(xiàng)式擬合[3]。通過 Matlab編程可以得到CT-μ和CQ-μ的特性曲線,所得到的曲線見圖1。
由圖1可以得到CT和CQ,在代入式(3)和(4),就可以得出推力Tp和轉(zhuǎn)矩MP。
1.1.2 柴油機(jī)本體數(shù)學(xué)模型
柴油機(jī)的穩(wěn)定工況是由給定負(fù)荷下曲軸的恒定轉(zhuǎn)速來表征的,如果忽略機(jī)組的摩擦力矩,只有柴油機(jī)的輸出轉(zhuǎn)矩Md與轉(zhuǎn)化至曲軸的阻力矩MC相等,即Md=MC。然而出現(xiàn)非穩(wěn)定工況時(shí),靜平衡就會(huì)遭到破壞,使發(fā)動(dòng)機(jī)曲軸的角速度發(fā)生變化,按動(dòng)量矩原理可寫成微分方程式為:

對(duì)于增壓柴油機(jī)而言,有效轉(zhuǎn)矩Md是循環(huán)供油量gc和有效效率ηe的函數(shù),由于有效轉(zhuǎn)矩ηe取決于兩個(gè)主要參數(shù):過量空氣系數(shù)α和曲軸角速度ω,或是增壓空氣壓力pK及ω;負(fù)載轉(zhuǎn)矩MC是負(fù)載系數(shù)N和曲軸角速度ω的函數(shù)[4]。
通過泰勒級(jí)數(shù)變換和整理,可以得到柴油機(jī)的線性化模型:

式中:T——發(fā)動(dòng)機(jī)的時(shí)間常數(shù);
K——發(fā)動(dòng)機(jī)自平衡常數(shù);
θ1——增壓壓力放大系數(shù);
θ2——負(fù)荷調(diào)整放大系數(shù)。

(ω0、gC0、pK0和 N0分別代表平衡工況下的曲軸角速度、每循環(huán)供油量、增壓空氣壓力和負(fù)載系數(shù))
1.2 船機(jī)槳仿真模型
1.2.1 船槳系統(tǒng)模型的建立
前面已經(jīng)介紹了Kp和KQ,并說明它們是J和θ(螺距角)的函數(shù)。在這里通過對(duì)螺旋槳的設(shè)計(jì)圖譜進(jìn)行多項(xiàng)式擬合,從而構(gòu)成Kp和KQ函數(shù)發(fā)生器,只要在“初始參數(shù)”模塊中對(duì)應(yīng)的輸入螺距比、進(jìn)程比、盤面比和槳葉數(shù),就可以得到兩個(gè)信號(hào),信號(hào)1是KP的值,信號(hào)2是KQ的值。其中螺距比、進(jìn)程比、盤面比和槳葉數(shù)可以通過圖譜獲得。
在螺旋槳給定的情況下,它的螺距比、盤面比和槳葉數(shù)可確定的值,但是進(jìn)程比是螺旋槳的轉(zhuǎn)速n、直徑D和船的航速vs的函數(shù) (J =)。在整個(gè)系統(tǒng)的仿真模型中,通過反饋系統(tǒng)就可以得到隨航速和轉(zhuǎn)速函數(shù)變化的進(jìn)程比,使整個(gè)推進(jìn)系統(tǒng)在大工況范圍下進(jìn)行仿真。圖3所示為船槳系統(tǒng)仿真模型。
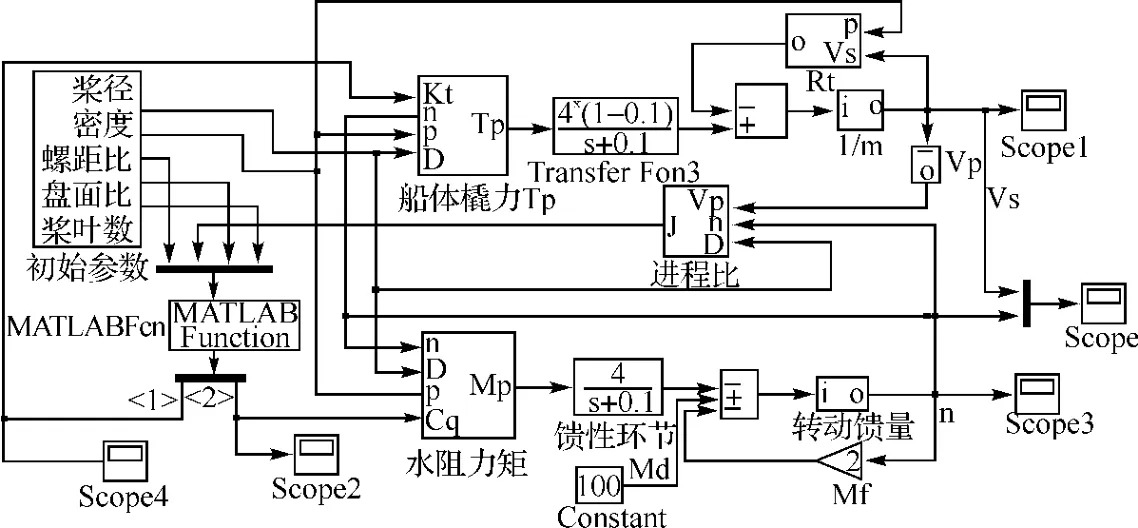
圖2 船槳系統(tǒng)仿真模型
在圖2所示的機(jī)槳系統(tǒng)仿真模型中,大多數(shù)的模塊是由子系統(tǒng)構(gòu)成的,這樣系統(tǒng)的結(jié)構(gòu)就有了層次。在建立模型時(shí)條理清晰,仿真運(yùn)行時(shí),也能及時(shí)發(fā)現(xiàn)錯(cuò)誤,便于修改和調(diào)試。
1.2.2 柴油機(jī)本體仿真模型
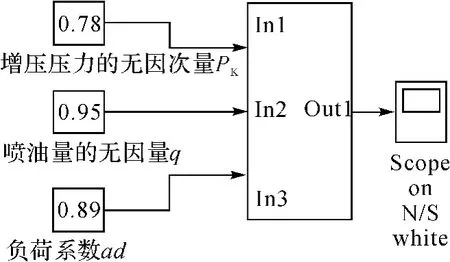
圖3 柴油機(jī)本體仿真模型
為了便于闡述問題,只對(duì)柴油機(jī)本體進(jìn)行建立仿真模型。依據(jù)前面所建立的數(shù)學(xué)模型,可以建立圖3所示的仿真模型。把柴油機(jī)仿真模型的輸出轉(zhuǎn)換成轉(zhuǎn)矩Md,并連接到船槳模型中,就構(gòu)成了一套船舶推進(jìn)系統(tǒng)的仿真。當(dāng)然,本文所述的只是柴油機(jī)本體的仿真。
1.3 仿真結(jié)果和分析
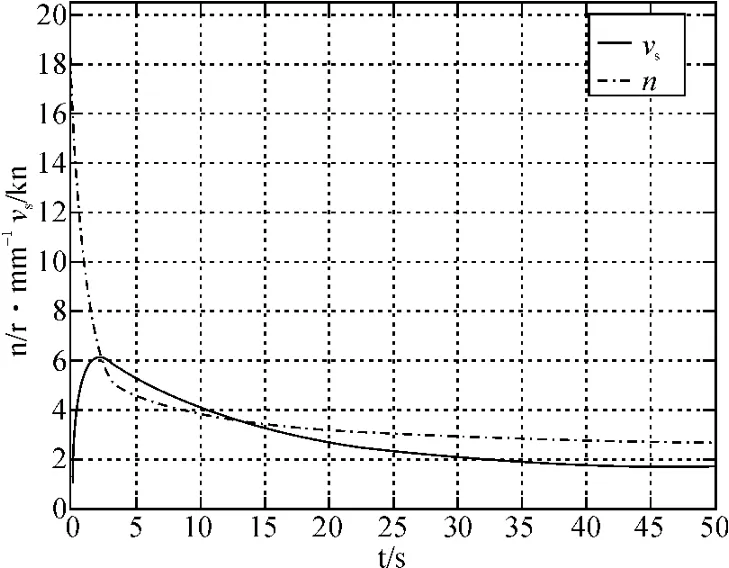
圖4 螺旋槳轉(zhuǎn)速n和船舶航速vs的仿真曲線
在前面建立的推進(jìn)裝置系統(tǒng)模型里,輸入螺旋槳和柴油機(jī)的初始參數(shù)。確定系統(tǒng)的采樣時(shí)間為50s。系統(tǒng)運(yùn)行結(jié)束以后,就可以獲得圖4所示的螺旋槳轉(zhuǎn)速n和船舶的航速vs仿真曲線。在模型的仿真過程中,由于J=,導(dǎo)致螺旋槳的轉(zhuǎn)速不能從零開始,而是主機(jī)先給螺旋槳一定的轉(zhuǎn)速,是船舶在系統(tǒng)的控制下開始航行,及航速?gòu)牧汩_始增大。隨時(shí)間的推移,大概在35s后,螺旋槳的轉(zhuǎn)速和船舶的航速都趨于穩(wěn)定。但是轉(zhuǎn)速曲線在15s后就基本的趨于穩(wěn)定,比航速曲線將近快了20s的時(shí)間。這與所輸入的柴油機(jī)扭矩的變化狀態(tài)有關(guān),而且還與系統(tǒng)中各個(gè)環(huán)節(jié)的影響因素有關(guān),例如船體總阻力RT,摩擦阻力矩Mf。
2 結(jié)論
通過對(duì)螺旋槳的設(shè)計(jì)圖譜進(jìn)行多項(xiàng)式擬合,使之構(gòu)成函數(shù)發(fā)生器,從而使推進(jìn)系統(tǒng)能夠在大工況的情況下進(jìn)行仿真,得出更合理、更準(zhǔn)確的分析曲線。通過建立船槳運(yùn)動(dòng)模型,仿真模型不僅考慮了推進(jìn)系統(tǒng)本身的特性,還考慮了船體阻力和摩擦力矩的影響。利用該裝置可以實(shí)現(xiàn)艦舶在給定螺旋槳的各參數(shù)下對(duì)航速和螺旋槳轉(zhuǎn)速進(jìn)行仿真,各環(huán)節(jié)之間的仿真曲線相吻合,同時(shí)又與理論結(jié)果相吻合,證明了仿真模型的正確性和可行性,滿足了仿真的要求。
[1]富 喜.模擬仿真技術(shù)在船舶推進(jìn)裝置中的應(yīng)用[J].中外船舶科技,2004(3):16-20.
[2]翁史烈.船舶動(dòng)力裝置仿真技術(shù)[M].上海:上海交通大學(xué)出版社,1991.
[3]李殿璞,王宗義.螺旋槳特性四象限Chebyshev擬合式的建立與深水潛艇直航全工況運(yùn)動(dòng)仿真的實(shí)現(xiàn)[J].計(jì)算機(jī)仿真學(xué)報(bào),2002(7):635-639.
[4]程國(guó)瑞.船舶動(dòng)力裝置原理[M].北京:國(guó)防工業(yè)出版社,2001.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45