全方向推進器葉片調距機構設計
2007-01-28 06:51:14
船海工程 2007年3期
1.哈爾濱工業大學 力學博士后流動站 哈爾濱 150001;2.哈爾濱工程大學 船舶工程學院 哈爾濱 150001
全方向推進器是一種新型的特種推進器,其槳葉在旋轉一周的過程中,葉片螺距角周期性變化,在產生軸向推力的同時也產生橫向和垂向推力[1]。迄今為止,國內對全方向推進器的研究還一直局限在水動力性能計算方面[2-4]。在國外,該種推進器的理論研究是與試驗研究同時展開的。以日本三菱重工的難波直愛、川崎重工技術研究院渡邊和夫、船舶技術研究所田村兼吉[5-7]為代表的研究人員分別進行了模型試驗,對影響全方向推進器性能的一些參數進行了研究,這些參數主要包括槳葉縱傾角、槳葉螺距角、葉剖面形狀及槳葉輪廓,所公布的測量數據主要是全方向推進器的軸向推力以及橫向﹑垂向的單獨性能,一些關鍵的數據未見發表。
展開全方向推進器的試驗研究,無論是對于理論研究成果的檢驗,還是對于具體使用方面的推廣、應用,都有著極其重要的意義。因此,參照國外各研究單位所作的全方向推進器的試驗,自行設計全方向推進器的葉片調距機構。
1 按擺線規律變化的調距機構
全方向推進器調距機構的開發難點是:為了在一個螺旋槳上產生三個方向的推力,必須將能產生沿槳軸方向可變推力的調距螺旋槳和能產生垂直于槳軸方向推力的豎軸直翼推進器[8]合二為一。
參照擺線推進器的葉片螺距控制機構原理以及日本川崎重工圓盤連桿調距機構原理,進行設計。
1.1 葉片調距的基本原理
如圖1所示,4個葉片在圓周上均勻分布,都通過一個連桿與一個偏心機構相連接;通過偏心機構的平移或者轉動來帶動葉片轉動,從而改變葉片螺距角,產生推力。偏心機構可以轉動,也可以在平面內向任意方向平動。
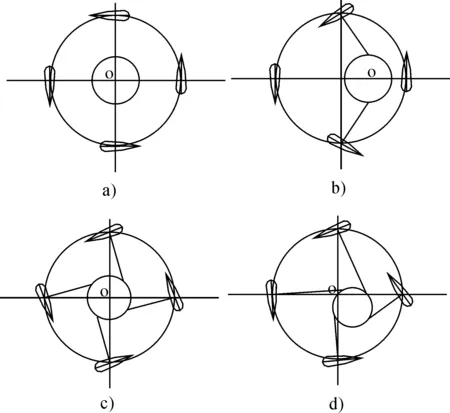
圖1 偏心機構調距的基本原理
圖1中,a)表示偏心機構無變化,這時全方向推進器4個葉片螺距角都為零,不產生推力;b)表示偏心機構發生平移,可以在垂直于軸向的平面上產生任意方向的大小可變的推力,推力的大小由偏心率來決定,而推力的方向則取決于偏心機構的平移方向;c)表示偏心機構只有轉動無平動,這時4個葉片的螺距角相同,全方向推進器只產生軸向推力,推力的大小由螺距角的大小決定,即取決于偏心機構轉動的角度;d)表示偏心機構即發生旋轉又有平移,這時全方向推進器可以產生三維可變推力,推力的大小和方向由偏心機構平移的大小、方向以及旋轉角度的大小來決定。
1.2 葉片調距的機構的實現
基于上述調距原理,設計一種全方向推進器的試驗模型,試驗模型裝配圖見圖2,從圖中可以清楚地看到艇體、電機以及調距機構之間的相對位置。
從圖2中可以看到調距機構包括偏心機構和上、下兩個雙十字滑道。其中上面的雙十字滑道與艇體固定在一起,而下面的雙十字滑道則通過定滑塊以及底盤與槳轂固定在一起。上、下兩個雙十字滑道通過一根軸相連。這根軸通過偏心內盤,通過一個電機來帶動可以上下移動,同時偏心內盤可以圍繞它進行轉動。
1.2.1 實現偏心機構的平動
圖2中偏心機構的平動是通過雙十字滑道+滑塊的機構來實現的。圖3是一個雙十字滑道的簡圖。

1-雙十字滑道;2-雙十字滑道支座;3-偏心內盤;4-擺桿;5-擺桿滑塊;6-偏心外盤;7-圓環(固定在偏心外盤上,使內外盤只能相互轉動);8-雙十字滑道;9-雙十字滑道支座;10-固定盤(固定在槳轂上,支撐雙十字滑道支座);11-葉片軸;12-偏心內盤;13-偏心外盤。圖2 全方向推進器的試驗模型裝配圖(擺線原理)

圖3 雙十字滑
1.2.2 實現偏心機構的轉動
見圖2所示,將偏心機構分成偏心內盤12和偏心外盤13,內外盤之間可以相互轉動。外盤與定滑塊固定在一起,并固定于底盤上,在外盤上表面與內盤連接處布置一圈斜齒。內盤上固定的斜齒輪與外盤的斜齒相嚙合,當齒輪轉動時,內盤將發生與外盤的相對轉動,通過內盤中間軸的上下移動來帶動齒輪的轉動。
2 圓盤連桿機構
2.1 圓盤連桿機構的調距原理
4個葉片通過轉軸固定在槳轂上,軸心與槳主軸有45°傾角。每個葉片都由連桿一端以某種方式與葉片軸相連,另一端與一個旋轉盤相連。旋轉盤由兩個盤連在一起,兩個盤之間僅僅可以相互轉動。與連桿相連的盤(A盤)要與槳葉和槳轂一起圍繞槳主軸通角速度旋轉。后面的盤(B盤)則與液壓傳動機構相連,不可以旋轉。液壓傳動機構控制B盤,使之可以前后平動,可以傾斜(如果槳葉主軸沿x方向,則傾斜可以在y或者z方向上),也可以既平動又傾斜。
1)旋轉盤有一個平衡位置,在此位置上,葉片螺距角均為0,全方向推進器不產生推力(圖4);

圖4 中立狀
2)當B盤帶動A盤前后平動時(圖5),4個葉片產生相同的轉角,即4個葉片的螺距角相同,從而使全方向推進器只產生軸向力;

圖5 前后移
3)當B盤帶動A盤傾斜時(圖6),兩個葉片的螺距角為零,另外兩個螺距角大小相同,方向相反,根據前面的分析,螺旋槳產生橫向或垂向側向力;

圖6 傾
4)當B盤帶動A盤即平動又傾斜時(圖7),則4個葉片的轉動角度都不同,螺旋槳產生任意方向推力。這樣通過液壓系統控制B盤的傾斜、平移就可以調節螺旋槳力的方向,力的大小則由平動和傾斜的幅度來控制。
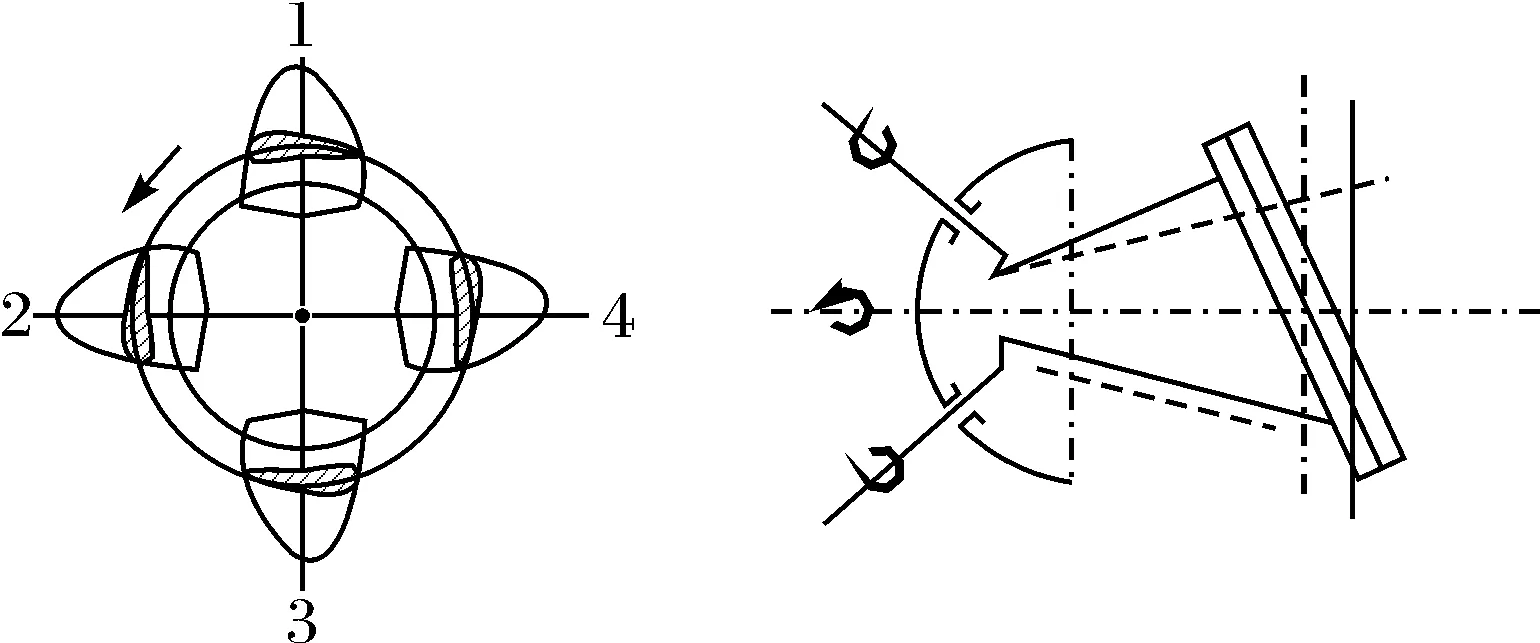
圖7 平動又傾
實現的難點在于怎樣通過連桿的移動來控制葉片軸的轉動以及A、B盤之間的連接。
2.2 圓盤連桿機構的實現
關于圓盤連桿機構的設想來源于日本川崎重工的模型試驗,但需要自主開發設計一套圓盤連桿機構。
圖8是圓盤連桿機構的機構示意圖。

1-電推缸;2-傳動輪;3-拉桿;4-連接桿;5-彎推桿;6-滾動軸承;7-滑塊;8-密封圈;9-平面軸承;10-槳葉;11-滾動軸承;12-關節軸承;13-推桿;14-槳轂;15-軸承;16-主軸;17-滾動軸承;18-殼體;19-動盤 20;定盤;21-減速機;22-主電機。圖8 圓盤連桿機構示意
3 兩種調距機構的比較
采用圓盤連桿機構和偏心機構都可以實現葉片螺距角的周期性變化。兩種調距機構在理論上都是可行的,原理也簡單明了,但是在具體設計實現方面各有優缺點。
1) 葉片螺距角的變化規律不同。采用圓盤連桿機構時是按正弦規律變化,而采用偏心機構時是按擺線規律來變化的。
2) 試驗模型的總重量和外形尺寸不同。采用圓盤連桿機構時,由于控制圓盤需要采用液壓系統,而液壓系統的尺寸通常比較大,重量也很大。相比而言,偏心機構采用的部件尺寸很小,重量也很輕,因此,更有利于減少潛器的總重量。
3) 造價不同。由于兩種機構采用的零部件不同,因此造價也有區別,從文中給出的模型比較來看,采用圓盤連桿機構的造價更高。
4) 實現的難度不同。采用偏心機構時,小尺寸零件更多,在零件的加工精度上要求比采用圓盤連桿機構高,對強度也提出了更高的要求,因而也更加難以實現。
4 結論
通過比較可以看出偏心調距機構與與圓盤連桿機構相比有重量輕、外形尺寸小等優點。但由于現階段加工上存在困難,零件的強度要求也難以滿足。因此,偏心調距機構目前還難以實現,有待于今后進一步改進。在將要進行的模型試驗中,將采用圓盤連桿機構來實現葉片螺距角的周期性變化。
[1] 黃 勝.3次元推進器.VARIVECプロペラの研究[R].大阪府立大學大學院海洋システム分野,2001:12~25.
[2] 寧至勝.升力面方法預報全方向推進器的水動力性能[D].哈爾濱:哈爾濱工程大學,1997.
[3] 王樂勝.潛器的全方位推進器的水動力性能研究[D].哈爾濱:哈爾濱工程大學,2002.
[4] 常 欣.潛器全方向推進器的研究[D].哈爾濱:哈爾濱工程大學,2005.
[5] 難波直愛.全方向推力推進器の開發(その1)[R].大阪關西造船協會,1988.
[6] 渡邊和夫.3次元推進器“バリベックプロペラ”の開發(第2報)[R].東京川崎重工業株式會社,1989.
[7] 田村兼吉.バリベックプロペラの研究[R].東京船舶技術研究所,1991.
[8] 黃 勝.船舶推進節能技術與特種推進器[M].哈爾濱:哈爾濱工程大學出版社,1998:117~129.